






 本文深入讲解了在ROS中实现机器人坐标变换的方法,介绍了tf功能包的安装与使用,包括坐标系间的变换、监听与可视化技巧。
本文深入讲解了在ROS中实现机器人坐标变换的方法,介绍了tf功能包的安装与使用,包括坐标系间的变换、监听与可视化技巧。
研究ros表示机器人坐标变换,我们需要使用到功能包tf,
在使用之前一般要预先安装(有些ros版本回自己带着,比如我的kinetic,但如果没有的话,一般可以使用命令
sudo apt-get install ros--turtle-tf 在后续自己实践中要记得将,换成自己ros的版本(不然会出现无法定位,这种错误又出现过,如果实在不知道自己ros的版本号,则可以使用以下命令1.roscore//启动rosmaster
2.rosparam list//查看ROS的参数
3.rosparam get /rosdistro//直接查看ros的版本
roslaunch是一个用来运行脚本的文件,我们可以使用「命令roslaunch turtle_tf turtle_tf_demo.launch//这个命令会产生两个海龟,一个海龟将会不断跟着,另一个由我们控制的龟,但是并不是跟踪,是为了不择手段的跟着另一个海归(并不是完全跟着他的移动路径)
为了控制海归移动我们需要使用命令 rosrun turtlesim turtle_teleop_key
为了更加直观的看到整个系统坐标间的关系我们可以使用 rosrun tf view_frames
监听一段时间,便会显示出一个PDF文件,一般放在当前文件加内
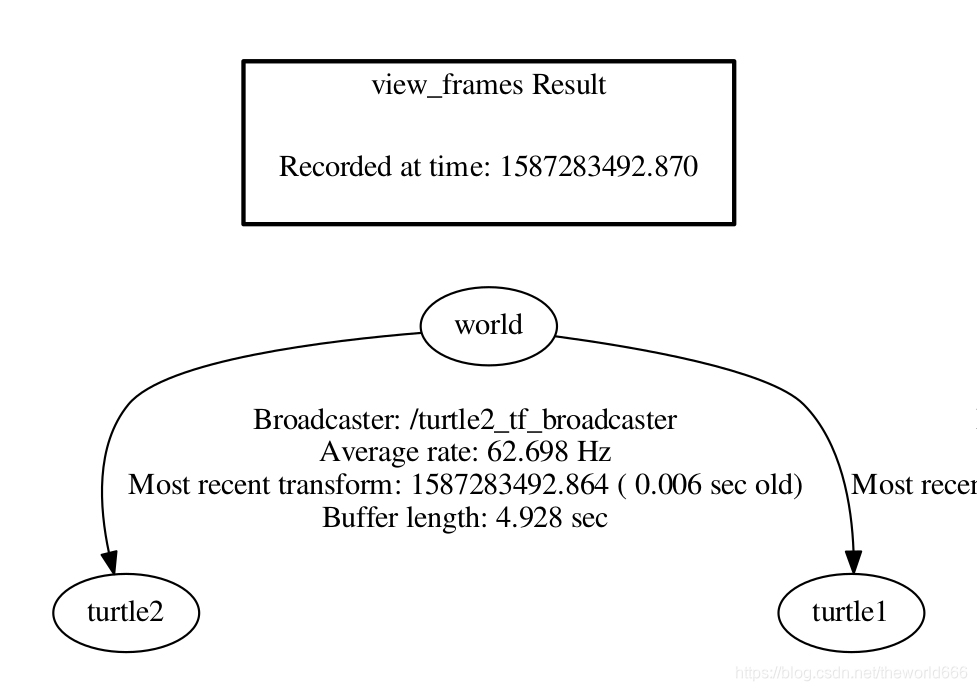
这个图准确表示了我们运行的两只海归坐标系与世界坐标系的关系
同时我们还可以使用 rosrun tf tf_echo 坐标系1 坐标系2 这样我们就可以看出坐标系之间的变换

translation 表示平移
rotation 表示旋转 下面是种不同的的表示旋转的方法 第一行是四元数,第二行是弧度,第三行是角度,后两行均通过,xyz坐标来描述(学过机器人旋转的我表示很欣慰)

















 660
660

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









