









1. 动感平台物理结构
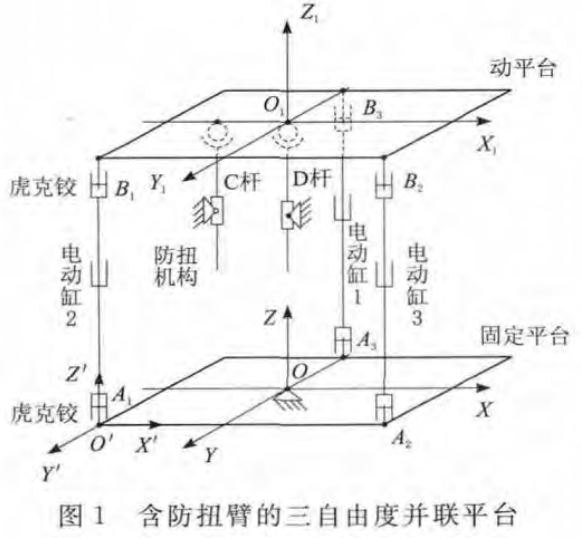
如图1所示,动感平台由动平台、固定平台、驱动支链及防扭臂组成。防扭臂通过球铰与动平台连接,D杆只能沿Z轴方向移动,C杆沿移动副平动同时可绕Y轴平行方向转动。平台具有3个自由度,分别是绕Y1轴的侧翻运动,绕X1轴的俯仰运动和沿Z1轴的竖直平动。
2. 动感平台逆解分析
逆解分析是已知动平台姿态 ( α,β,z p),求解3根电动缸的长度,其中 z p为动平台中心点O1在动平台Z方向的位移。
2.1 UE4坐标系
UE4采用的是和Direct3D一致的左手坐标系,坐标向量为行向量,并且规定X轴正方向为右,Y轴正方向为外,Z轴正方向为上。绕轴旋转
平移变换
将三维空间中的一个点[x, y, z, 1]移动到另外一个点[x’, y’, z’, 1],三个坐标轴的移动分量分别为xp,Yp,Zp,即
x’ = x + xp
y’ = y + yp
z’ = z + zp
平移变换的矩阵如下:
[x′y′z′1]
=
[xyz1]
⎡⎣⎢⎢⎢⎢100xp010yp001zp0001⎤⎦⎥⎥⎥⎥
旋转变换
绕X轴旋转时,顶点的x坐标不发生变化,y坐标和z坐标绕X轴旋转
α
度,旋转的正方向为顺时针方向(从轴的正端点向负端点看)。[x, y, z, 1]表示变换前的点,[x’, y’, z’, 1]表示变换后的点,变换矩阵如下:
[x′y′z′1]
=
[xyz1]
⎡⎣⎢⎢⎢10000cosα−sinα00sinαcosα00001⎤⎦⎥⎥⎥
绕Y轴旋转时,顶点的y坐标不发生变化,x坐标和z坐标绕X轴旋转
β
度。[x, y, z, 1]表示变换前的点,[x’, y’, z’, 1]表示变换后的点,变换矩阵如下:
[x′y′z′1]
=
[xyz1]
⎡⎣⎢⎢⎢cosβ0sinβ00100−sinβ0cosβ00001⎤⎦⎥⎥⎥
绕Z轴旋转时,顶点的z坐标不发生变化,x坐标和y坐标绕X轴旋转
θ
度。[x, y, z, 1]表示变换前的点,[x’, y’, z’, 1]表示变换后的点,变换矩阵如下:
[x′y′z′1]
=
[xyz1]
⎡⎣⎢⎢⎢cosθ−sinθ00sinθcosθ0000100001⎤⎦⎥⎥⎥
仿射变换
将向量先旋转再平移,并假定旋转顺序为XYZ,依次绕X轴旋转
α
,绕Y轴旋转
β
,绕Z轴旋转
θ
。则变换矩阵为
⎡⎣⎢⎢⎢10000cosα−sinα00sinαcosα00001⎤⎦⎥⎥⎥
⎡⎣⎢⎢⎢cosβ0sinβ00100−sinβ0cosβ00001⎤⎦⎥⎥⎥
⎡⎣⎢⎢⎢cosθ−sinθ00sinθcosθ0000100001⎤⎦⎥⎥⎥
⎡⎣⎢⎢⎢⎢100xp010yp001zp0001⎤⎦⎥⎥⎥⎥
=
⎡⎣⎢⎢⎢⎢cosβcosθsinαsinβcosθ−cosαsinθcosαsinβcosθ+sinαsinθxpcosβsinθsinαsinβsinθ+cosαcosθcosαsinβsinθ−sinαcosθyp−sinβsinαcosβcosαcosβzp0001⎤⎦⎥⎥⎥⎥
2.2 逆解分析
初始位置动定平台平行,平台虎克铰所组成三角形底边A1A2=B1B2=2b,底边高均为2h,则A1,A2,A3在固定坐标系下的齐次坐标为:
⎡⎣⎢A1A2A3⎤⎦⎥
=
⎡⎣⎢−bb0hh−h000111⎤⎦⎥
(1)
设动坐标系原点O1在固定坐标系下的坐标为(0,0,L)。B1,B2,B3在动坐标系下的齐次坐标为:
⎡⎣⎢B1B2B3⎤⎦⎥
=
⎡⎣⎢−bb0hh−h000111⎤⎦⎥
(2)
动坐标系O1X1Y1Z1转动欧拉角为绕X轴旋转角度
α
,绕Y轴旋转角度
β
,并沿Z轴平动位移zp。这里
θ
=xp=yp=0则动坐标系相对固定坐标系OXYZ的变换矩阵可表示为:
T=
⎡⎣⎢⎢⎢⎢cosβsinαsinβcosαsinβ00cosα−sinα0−sinβsinαcosβcosαcosβzp0001⎤⎦⎥⎥⎥⎥
(3)
由式(3)右乘式(2)齐次形式,可得到B1,B2,B3在固定坐标系下变换后的坐标为:
⎡⎣⎢B′1B′2B′3⎤⎦⎥
=
⎡⎣⎢−bb0hh−h000111⎤⎦⎥
⎡⎣⎢⎢⎢⎢cosβsinαsinβcosαsinβ00cosα−sinα0−sinβsinαcosβcosαcosβzp0001⎤⎦⎥⎥⎥⎥
=
⎡⎣⎢−bcosβ+hsinαsinβbcosβ+hsinαsinβ−hsinαsinβhcosαhcosα−hcosαbsinβ+hsinαcosβ+zp−bsinβ+hsinαcosβ+zp−hsinαcosβ+zp111⎤⎦⎥
求向量 A1B′1 , A2B′2 , A3B′3 的模即为电动缸伸缩后的长度 L1 , L2 , L3 。















 354
354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









