







伺服系统的三环PID控制是一种广泛应用于高精度运动控制场合的经典控制策略。它将位置环、速度环和电流环(或力矩环)分层设计,并在各个环中分别使用PID控制来优化性能,从而实现对伺服系统的精确控制。
1. 三环控制结构
(1) 三环结构分层
-
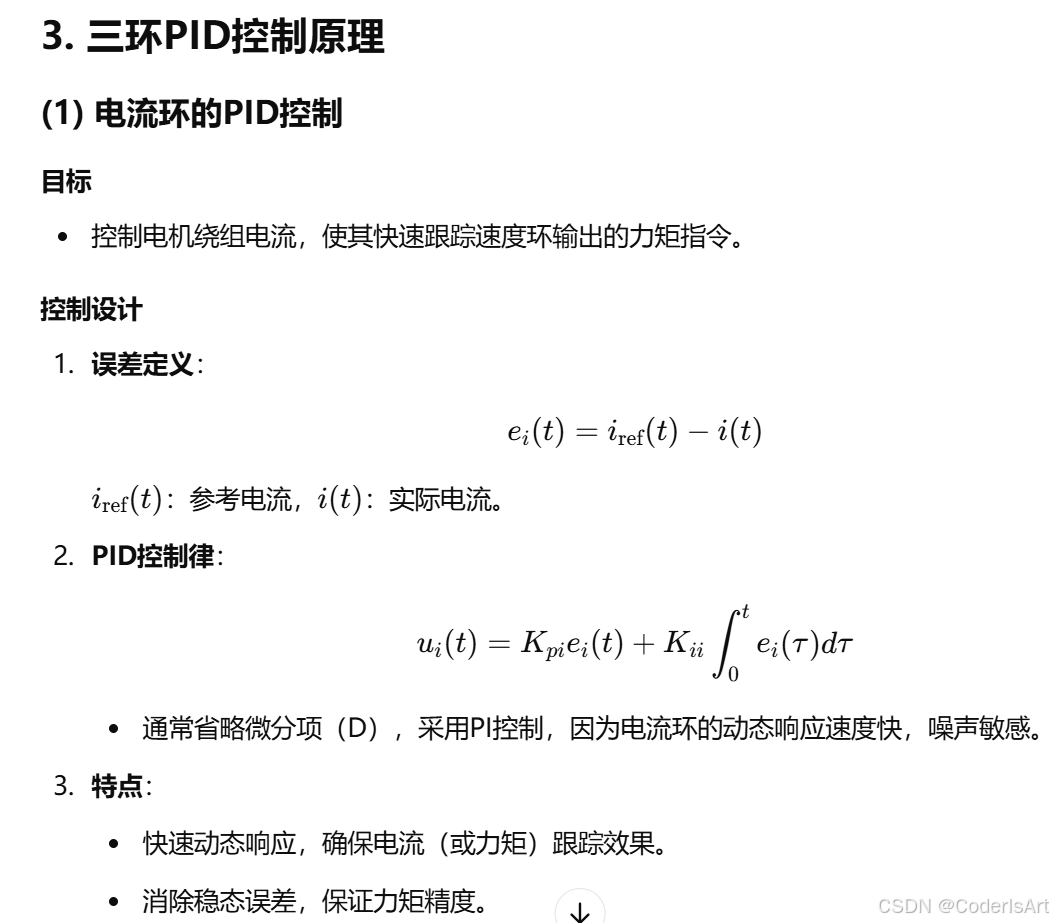
电流环(内环)
- 控制目标:控制电机电流(力矩),提供精确的驱动力。
- 动态特性:最快响应,典型周期在微秒级。
- 常用控制:PI控制,简单且能消除稳态误差。
-
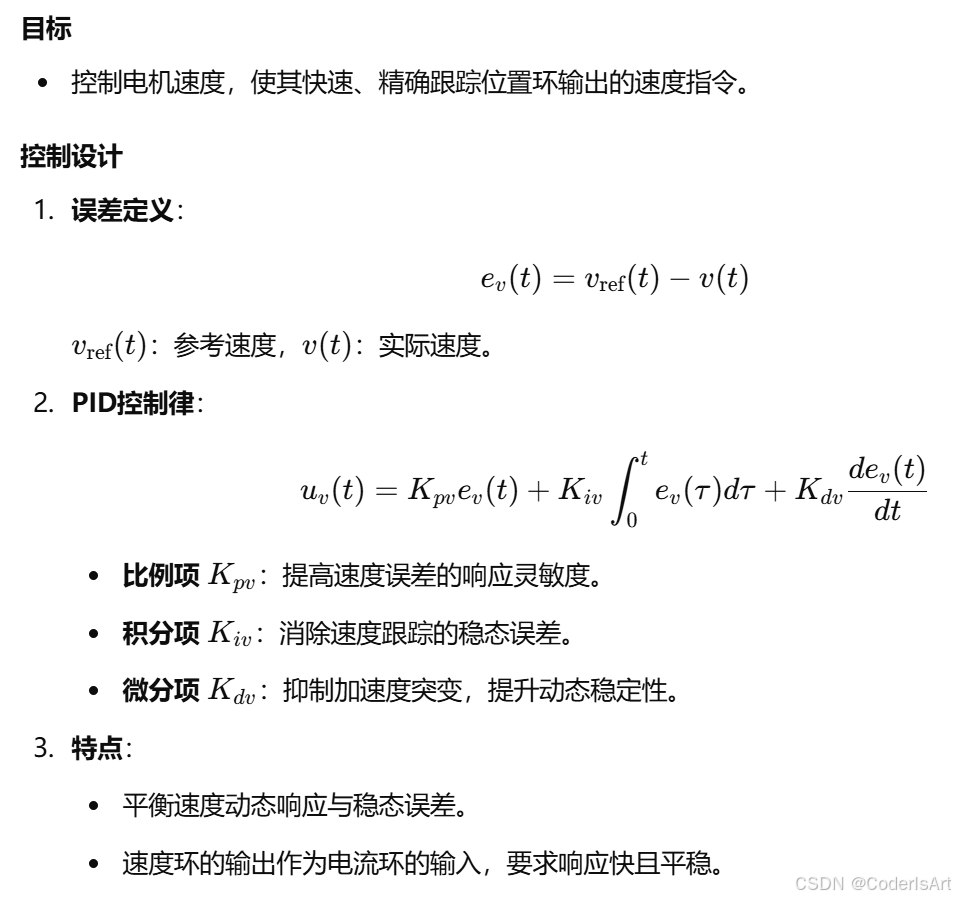
速度环(中环)
- 控制目标:调节电机转速,使速度跟踪速度指令信号。
- 动态特性:响应速度适中,控制周期通常为毫秒级。
- 常用控制:PID或PI控制。
-
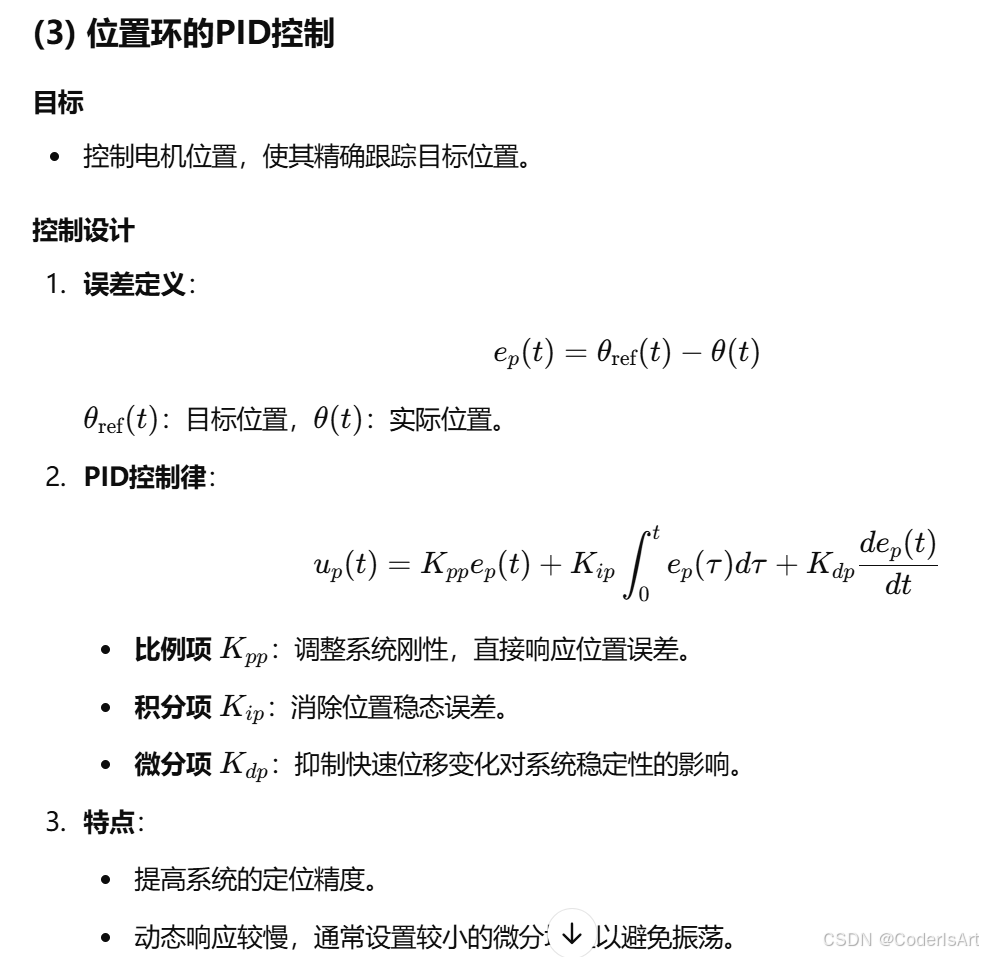
位置环(外环)
- 控制目标:调节电机角位移或位置,使位置指令得到准确跟踪。
- 动态特性:最慢响应,控制周期在毫秒至百毫秒级。
- 常用控制:PID控制。
(2) 时间尺度分离
- 电流环:用于控制电流,提供驱动力,时间尺度最小。
- 速度环:用以控制转速,负责动态性能,时间尺度居中。
- 位置环:跟踪目标位置指令,确保最终精度,时间尺度最大。
4. PID控制的优化与参数整定
(1) 参数整定方法
- Ziegler-Nichols方法:通过实验调试临界比例增益和振荡周期,计算初始参数值。
- 工程经验法:根据系统响应特点手动调整参数。
- 频域法:通过频率特性确定参数,优化系统性能。
- 优化算法:采用粒子群优化、遗传算法等智能优化方法自动调整参数。
5. 三环PID控制的优缺点
优点
- 分层控制:电流环、速度环和位置环按时间尺度分层,易于分析和调试。
- 高精度控制:位置环的PID控制消除稳态误差,速度环和电流环优化动态性能。
- 鲁棒性强:对外界干扰和系统参数变化有一定的适应能力。
缺点
- 参数整定复杂:每一环的PID参数需独立调试,交互影响较大。
- 响应滞后问题:位置环动态响应较慢,可能影响系统快速性能。
- 适应性有限:对强非线性系统性能可能不足。
6. 应用实例
(1) 机器人伺服系统
- 位置环:保证机械臂末端精准定位。
- 速度环:优化关节运动速度的动态跟踪。
- 电流环:提供平稳的驱动力输出。
(2) CNC机床伺服系统
- 位置环:确保加工路径精度。
- 速度环:控制刀具的平稳进给速度。
- 电流环:对抗负载变化。
7. 总结
三环PID控制通过逐层递归控制实现了位置、速度和力矩的精确控制。其位置环保证精度,速度环优化动态性能,电流环提供快速响应。适当设计和优化各环的PID参数是实现高性能伺服控制系统的关键。

















 2169
2169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









