







rcS是nuttx系统启动后,执行的脚本,主要实现对飞控外设以及核心算法模块的启动。
先贴一张图,这个图已经大致写出了rcS的流程。
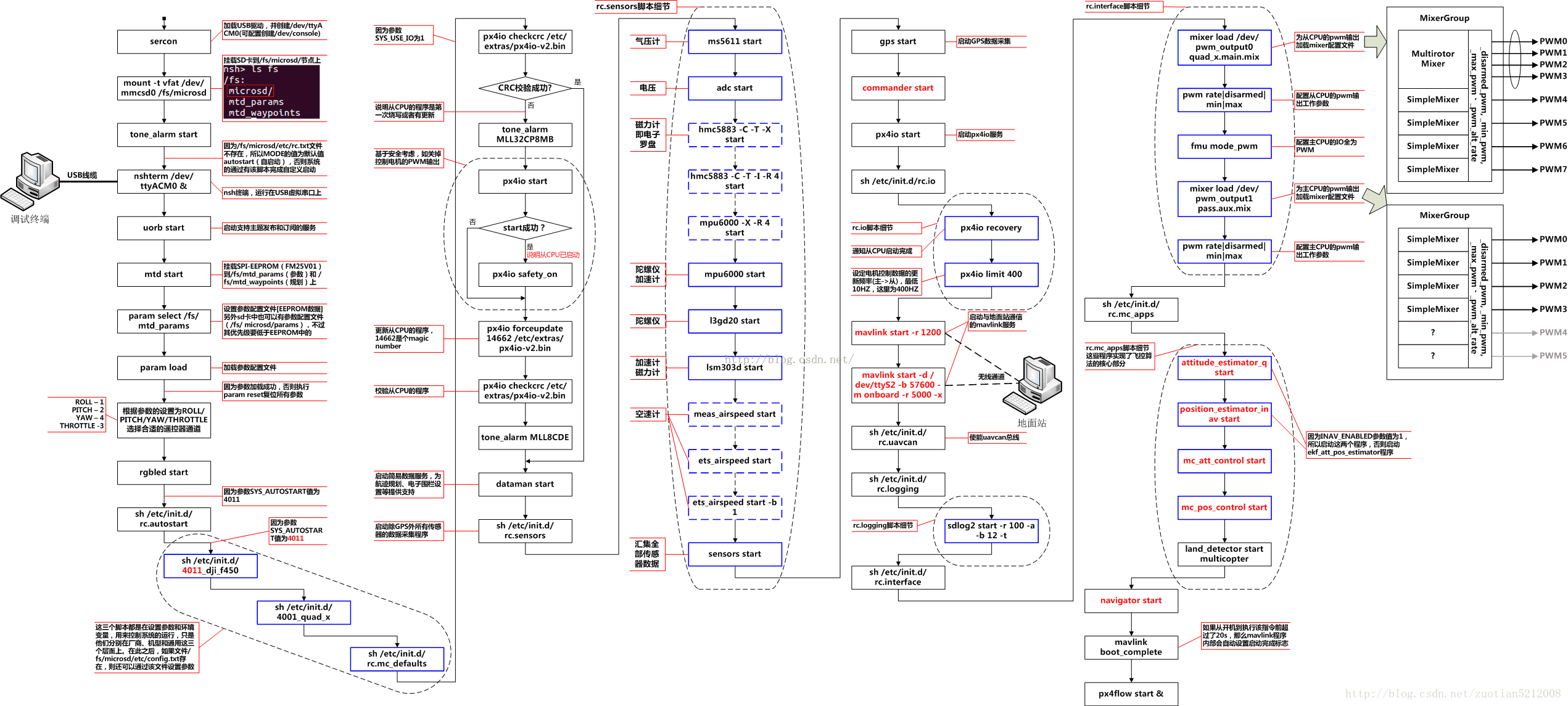
给出代码分析。有些地方没有分析到,还望指正。
1.rcS文件
#!nsh
#
# PX4FMU startup script.
#
# NOTE: COMMENT LINES ARE REMOVED BEFORE STORED IN ROMFS.
#
#
# Start CDC/ACM serial driver
#
sercon #启动USB串口驱动
#
# Default to auto-start mode.
#
set MODE autostart #设置参数 MODE TUNE_ERR LOG_FILE
set TUNE_ERR ML<<CP4CP4CP4CP4CP4
set LOG_FILE /fs/microsd/bootlog.txt
#
# Try to mount the microSD card.
#
# REBOOTWORK this needs to start after the flight control loop
if mount -t vfat /dev/mmcsd0 /fs/microsd #挂载SD卡
then
# Start playing the startup tune
tone_alarm start #挂载成功则发出对应声音
else
tone_alarm MBAGP #挂载不成功则发出对应声音,并格式化SD卡
if mkfatfs /dev/mmcsd0
then
if mount -t vfat /dev/mmcsd0 /fs/microsd
then
echo "INFO [init] MicroSD card formatted"
else
echo "ERROR [init] Format failed"
tone_alarm MNBG
set LOG_FILE /dev/null
fi
else
set LOG_FILE /dev/null
fi
fi
#
# Look for an init script on the microSD card.
# Disable autostart if the script found.
#
set FRC /fs/microsd/etc/rc.txt #判断rc.txt文件是否存在,存在则运行该文件,并设置MODE为custom。下面的就不执行了
if [ -f $FRC ]
then
echo "INFO [init] Executing script: $FRC"
sh $FRC
set MODE custom
fi
unset FRC
if [ $MODE == autostart ]
then
#
# Start the ORB (first app to start)
#
uorb start #启动uorb
#
# Load parameters
#
set PARAM_FILE /fs/microsd/params
if mtd start #启动mtd文件系统,并设置PARAM_FILE
then
set PARAM_FILE /fs/mtd_params
fi
param select $PARAM_FILE #加载PARAM_FILE文件里的内容。这些参数应该是通过qgc的parameters设置
if param load #加载失败了则 reset参数
then
else
if param reset
then
fi
fi
#
# Start system state indicator
#
if rgbled start #启动led
then
else
if blinkm start
then
blinkm systemstate
fi
fi
# Currently unused, but might be useful down the road
#if pca8574 start
#then
#fi
#
# Set AUTOCNF flag to use it in AUTOSTART scripts
#
if param compare SYS_AUTOCONFIG 1 #该参数默认为0.为1的话表示复位除RC以外的参数
then
# Wipe out params except RC*
param reset_nostart RC*
set AUTOCNF yes
else
set AUTOCNF no
#
# Release 1.4.0 transitional support:
# set to old default if unconfigured.
# this preserves the previous behaviour
#
if param compare BAT_N_CELLS 0
then
param set BAT_N_CELLS 3
fi
fi
#
# Set default values
#
set HIL no
set VEHICLE_TYPE none
set MIXER none
set MIXER_AUX none
set OUTPUT_MODE none
set PWM_OUT none
set PWM_RATE none
set PWM_DISARMED none
set PWM_MIN none
set PWM_MAX none
set PWM_AUX_OUT none
set PWM_AUX_RATE none
set PWM_ACHDIS none
set PWM_AUX_DISARMED none
set PWM_AUX_MIN none
set PWM_AUX_MAX none
set FAILSAFE_AUX none
set MK_MODE none
set FMU_MODE pwm
set AUX_MODE pwm
set MAVLINK_F default
set MAVLINK_COMPANION_DEVICE /dev/ttyS2
set EXIT_ON_END no
set MAV_TYPE none
set FAILSAFE none
set USE_IO yes
#
# Set USE_IO flag
#
if param compare SYS_USE_IO 1
then
if ver hwcmp PX4FMU_V4
then
set USE_IO no
fi
if ver hwcmp MINDPX_V2
then
set USE_IO no
fi
if ver hwcmp CRAZYFLIE
then
set USE_IO no
if param compare SYS_AUTOSTART 0
then
param set SYS_AUTOSTART 4900
set AUTOCNF yes
fi
fi
if ver hwcmp AEROFC_V1
then
set USE_IO no
fi
else
set USE_IO no
fi
if ver hwcmp AEROFC_V1
then
if param compare SYS_AUTOSTART 0
then
set AUTOCNF yes
fi
# We don't allow changing AUTOSTART as it doesn't work in
# other configurations
param set SYS_AUTOSTART 4070
fi
#
# Set parameters and env variables for selected AUTOSTART
#
if param compare SYS_AUTOSTART 0 #SYS_AUTOSTART不是0时,执行rc.autostart
then
else
sh /etc/init.d/rc.autostart #该文件根据SYS_AUTOSTART进行对应的机型脚本执行,比如vtol则执行sh /etc/init.d/ 13001_caipirinha_vtol, #机型文件里设置一些复位时默认PID参数,以及设置MIXER,PWM_OUT,这两个参数后边会用到
fi
unset MODE
#
# Wipe incompatible settings for boards not having two outputs
if ver hwcmp PX4FMU_V4
then
set MIXER_AUX none
fi
if ver hwcmp AEROFC_V1
then
set MIXER_AUX none
fi
#
# Override parameters from user configuration file
#
set FCONFIG /fs/microsd/etc/config.txt #判断config.txt是否存在,存在的话就执行该文件。
if [ -f $FCONFIG ]
then
echo "Custom: $FCONFIG"
sh $FCONFIG
fi
unset FCONFIG
#
# If autoconfig parameter was set, reset it and save parameters
#
if [ $AUTOCNF == yes ]
then
param set SYS_AUTOCONFIG 0
fi
unset AUTOCNF
set IO_PRESENT no
if [ $USE_IO == yes ]
then
#
# Check if PX4IO present and update firmware if needed
#
if [ -f /etc/extras/px4io-v2.bin ] #px4io-v2.bin是否存在,存在则设置IO_FILE为该文件
then
set IO_FILE /etc/extras/px4io-v2.bin
else
set IO_FILE /etc/extras/px4io-v1.bin
fi
if px4io checkcrc ${IO_FILE} #对px4io-v2.bin文件进行CRC校验
then
echo "[init] PX4IO CRC OK" >> $LOG_FILE #校验成功
set IO_PRESENT yes
else #校验失败
tone_alarm MLL32CP8MB
if px4io start #如果px4io已经启动
then
# try to safe px4 io so motor outputs dont go crazy
if px4io safety_on #开启安全开关
then
# success! no-op
else
# px4io did not respond to the safety command
px4io stop
fi
fi
if px4io forceupdate 14662 ${IO_FILE} #更新IO文件
then
usleep 500000
if px4io checkcrc $IO_FILE
then
echo "PX4IO CRC OK after updating" >> $LOG_FILE
tone_alarm MLL8CDE
set IO_PRESENT yes
else
echo "PX4IO update failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
else
echo "PX4IO update failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
unset IO_FILE
if [ $IO_PRESENT == no ]
then
echo "PX4IO not found" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
#
# Set default output if not set
#
if [ $OUTPUT_MODE == none ]
then
if [ $USE_IO == yes ]
then
set OUTPUT_MODE io 设置OUTPUT_MODE为 io
else
set OUTPUT_MODE fmu
fi
fi
if [ $OUTPUT_MODE == io -a $IO_PRESENT != yes ]
then
# Need IO for output but it not present, disable output
set OUTPUT_MODE none
# Avoid using ttyS0 for MAVLink on FMUv1
if ver hwcmp PX4FMU_V1
then
set FMU_MODE serial
fi
fi
if [ $OUTPUT_MODE == ardrone ]
then
set FMU_MODE gpio_serial
fi
if [ $OUTPUT_MODE == tap_esc ]
then
set FMU_MODE rcin
fi
if [ $HIL == yes ]
then
set OUTPUT_MODE hil
if ver hwcmp PX4FMU_V1
then
set FMU_MODE serial
fi
unset HIL
else
unset HIL
gps start #启动gps
fi
# waypoint storage
# REBOOTWORK this needs to start in parallel
if dataman start
then
fi
#
# Sensors System (start before Commander so Preflight checks are properly run)
#
sh /etc/init.d/rc.sensors #运行rc.sensors脚本,启动除gps以外的传感器
# Needs to be this early for in-air-restarts
if [ $OUTPUT_MODE == hil ]
then
commander start -hil
else
commander start
fi
#
# Start CPU load monitor
#
load_mon start #启动CPU 监控
#
# Start primary output
#
set TTYS1_BUSY no #设置TTYS1_BUSY 为 no
#
# Check if UAVCAN is enabled, default to it for ESCs
#
if param greater UAVCAN_ENABLE 2
then
set OUTPUT_MODE uavcan_esc
fi
# Sensors on the PWM interface bank
# clear pins 5 and 6
if param compare SENS_EN_LL40LS 1
then
set FMU_MODE pwm4
set AUX_MODE pwm4
fi
if param greater TRIG_MODE 0
then
set FMU_MODE pwm4
set AUX_MODE pwm4
camera_trigger start
fi
# If OUTPUT_MODE == none then something is wrong with setup and we shouldn't try to enable output
if [ $OUTPUT_MODE != none ] #如果OUTPUT_MODE为空,则启动该有问题,不应该使能输出。上面已经将OUTPUT_MODE置为 io
then
if [ $OUTPUT_MODE == uavcan_esc ]
then
if param compare UAVCAN_ENABLE 0
then
echo "OVERRIDING UAVCAN_ENABLE = 3" >> $LOG_FILE
param set UAVCAN_ENABLE 3
fi
fi
if [ $OUTPUT_MODE == io -o $OUTPUT_MODE == uavcan_esc ] #OUTPUT_MODE为 io,则进入该步骤
then
if px4io start #启动px4io
then
sh /etc/init.d/rc.io #执行 rc.io脚本, px4io recovery:允许 px4io从半空启动。
#set PX4IO_LIMIT 400:设置 pwm限速为400hz
else
echo "PX4IO start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
if [ $OUTPUT_MODE == fmu -o $OUTPUT_MODE == ardrone ]
then
if fmu mode_$FMU_MODE
then
else
echo "FMU start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
if ver hwcmp PX4FMU_V1
then
if [ $FMU_MODE == pwm -o $FMU_MODE == gpio ]
then
set TTYS1_BUSY yes
fi
if [ $FMU_MODE == pwm_gpio -o $OUTPUT_MODE == ardrone ]
then
set TTYS1_BUSY yes
fi
fi
fi
if [ $OUTPUT_MODE == mkblctrl ]
then
set MKBLCTRL_ARG ""
if [ $MKBLCTRL_MODE == x ]
then
set MKBLCTRL_ARG "-mkmode x"
fi
if [ $MKBLCTRL_MODE == + ]
then
set MKBLCTRL_ARG "-mkmode +"
fi
if mkblctrl $MKBLCTRL_ARG
then
else
echo "MK start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
unset MKBLCTRL_ARG
fi
unset MK_MODE
if [ $OUTPUT_MODE == hil ]
then
if pwm_out_sim mode_pwm16
then
else
tone_alarm $TUNE_ERR
fi
fi
#
# Start IO or FMU for RC PPM input if needed
#
if [ $IO_PRESENT == yes ]
then
if [ $OUTPUT_MODE != io ]
then
if px4io start
then
sh /etc/init.d/rc.io
else
echo "PX4IO start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
else
if [ $OUTPUT_MODE != fmu -a $OUTPUT_MODE != ardrone ]
then
if fmu mode_$FMU_MODE
then
else
echo "FMU mode_$FMU_MODE start failed" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
if ver hwcmp PX4FMU_V1
then
if [ $FMU_MODE == pwm -o $FMU_MODE == gpio ]
then
set TTYS1_BUSY yes
fi
if [ $FMU_MODE == pwm_gpio -o $OUTPUT_MODE == ardrone ]
then
set TTYS1_BUSY yes
fi
fi
fi
fi
fi
if [ $MAVLINK_F == default ]
then
# Normal mode, use baudrate 57600 (default) and data rate 1000 bytes/s
if [ $TTYS1_BUSY == yes ]
then
# Start MAVLink on ttyS0, because FMU ttyS1 pins configured as something else
set MAVLINK_F "-r 1200 -d /dev/ttyS0"
# Exit from nsh to free port for mavlink
set EXIT_ON_END yes
else
set MAVLINK_F "-r 1200"
# Avoid using ttyS1 for MAVLink on FMUv4
if ver hwcmp PX4FMU_V4
then
set MAVLINK_F "-r 1200 -d /dev/ttyS1"
# Start MAVLink on Wifi (ESP8266 port)
mavlink start -r 20000 -m config -b 921600 -d /dev/ttyS0
fi
if ver hwcmp AEROFC_V1
then
set MAVLINK_F "-r 1200 -d /dev/ttyS4"
fi
fi
if ver hwcmp CRAZYFLIE
then
# Avoid using either of the two available serials
set MAVLINK_F none
fi
fi
if [ "x$MAVLINK_F" == xnone ]
then
else
mavlink start $MAVLINK_F
fi
unset MAVLINK_F
#
# MAVLink onboard / TELEM2
#
if ver hwcmp PX4FMU_V1
then
else
# XXX We need a better way for runtime eval of shell variables,
# but this works for now
if param compare SYS_COMPANION 10
then
frsky_telemetry start -d $MAVLINK_COMPANION_DEVICE
fi
if param compare SYS_COMPANION 20
then
syslink start
mavlink start -d /dev/bridge0 -b 57600 -m osd -r 40000
fi
if param compare SYS_COMPANION 921600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 921600 -m onboard -r 80000 -x
fi
if param compare SYS_COMPANION 57600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -m onboard -r 5000 -x
fi
if param compare SYS_COMPANION 157600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -m osd -r 1000
fi
if param compare SYS_COMPANION 257600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -m magic -r 5000 -x
fi
if param compare SYS_COMPANION 319200
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 19200 -r 1000
fi
if param compare SYS_COMPANION 338400
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 38400 -r 1000
fi
if param compare SYS_COMPANION 357600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 57600 -r 1000
fi
if param compare SYS_COMPANION 1921600
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 921600 -r 20000
fi
if param compare SYS_COMPANION 1500000
then
mavlink start -d $MAVLINK_COMPANION_DEVICE -b 1500000 -m onboard -r 100000 -x
fi
fi
unset MAVLINK_COMPANION_DEVICE
#
# Starting stuff according to UAVCAN_ENABLE value
#
if param greater UAVCAN_ENABLE 0
then
if uavcan start fw
then
else
tone_alarm $TUNE_ERR
fi
fi
#
# Optional drivers
#
# Sensors on the PWM interface bank
if param compare SENS_EN_LL40LS 1 #下面一部分目测为雷达,声呐等模块的启动,加入这些模块需要设置对应的param
then
if pwm_input start
then
if ll40ls start pwm
then
fi
fi
fi
# lightware serial lidar sensor
if param compare SENS_EN_SF0X 0
then
else
sf0x start
fi
# lightware i2c lidar sensor
if param compare SENS_EN_SF1XX 0
then
else
sf1xx start
fi
# mb12xx sonar sensor
if param compare SENS_EN_MB12XX 1
then
mb12xx start
fi
# teraranger one tof sensor
if param compare SENS_EN_TRONE 1
then
trone start
fi
if ver hwcmp PX4FMU_V4
then
frsky_telemetry start -d /dev/ttyS6
fi
if ver hwcmp MINDPX_V2
then
frsky_telemetry start -d /dev/ttyS6
fi
if ver hwcmp PX4FMU_V2
then
# Check for flow sensor - as it is a background task, launch it last
px4flow start & #启动 光流传感器在后台
fi
if ver hwcmp PX4FMU_V4
then
# Check for flow sensor - as it is a background task, launch it last
px4flow start &
fi
if ver hwcmp MINDPX_V2
then
px4flow start &
fi
# Start MAVLink
mavlink start -r 800000 -d /dev/ttyACM0 -m config -x #启动mavlink链接
#
# Logging
#
if ver hwcmp PX4FMU_V1
then
if sdlog2 start -r 30 -a -b 2 -t
then
fi
else
if param compare SYS_LOGGER 0
then
# check if we should increase logging rate for ekf2 replay message logging
if param greater EKF2_REC_RPL 0
then
if sdlog2 start -r 500 -e -b 18 -t
then
fi
else
if sdlog2 start -r 100 -a -b 9 -t
then
fi
fi
else
set LOGGER_ARGS ""
if param compare SDLOG_MODE 1
then
set LOGGER_ARGS "-e"
fi
if param compare SDLOG_MODE 2
then
set LOGGER_ARGS "-f"
fi
if logger start -b 12 -t $LOGGER_ARGS #启动log采集吧
then
fi
unset LOGGER_ARGS
fi
fi
#
# Start up ARDrone Motor interface
#
if [ $OUTPUT_MODE == ardrone ]
then
ardrone_interface start -d /dev/ttyS1
fi
#
# Fixed wing setup #这部分直接查看vtol
#
if [ $VEHICLE_TYPE == fw ]
then
if [ $MIXER == none ]
then
# Set default mixer for fixed wing if not defined
set MIXER AERT
fi
if [ $MAV_TYPE == none ]
then
# Use MAV_TYPE = 1 (fixed wing) if not defined
set MAV_TYPE 1
fi
param set MAV_TYPE $MAV_TYPE
# Load mixer and configure outputs
sh /etc/init.d/rc.interface
# Start standard fixedwing apps
sh /etc/init.d/rc.fw_apps
fi
#
# Multicopters setup
#
if [ $VEHICLE_TYPE == mc ]
then
if [ $MIXER == none ]
then
echo "Mixer undefined"
fi
if [ $MAV_TYPE == none ]
then
# Use mixer to detect vehicle type
if [ $MIXER == quad_x -o $MIXER == quad_+ ]
then
set MAV_TYPE 2
fi
if [ $MIXER == quad_w -o $MIXER == sk450_deadcat ]
then
set MAV_TYPE 2
fi
if [ $MIXER == quad_h ]
then
set MAV_TYPE 2
fi
if [ $MIXER == tri_y_yaw- -o $MIXER == tri_y_yaw+ ]
then
set MAV_TYPE 15
fi
if [ $MIXER == hexa_x -o $MIXER == hexa_+ ]
then
set MAV_TYPE 13
fi
if [ $MIXER == hexa_cox ]
then
set MAV_TYPE 13
fi
if [ $MIXER == octo_x -o $MIXER == octo_+ ]
then
set MAV_TYPE 14
fi
if [ $MIXER == octo_cox -o $MIXER == octo_cox_w ]
then
set MAV_TYPE 14
fi
if [ $MIXER == coax ]
then
set MAV_TYPE 3
fi
fi
# Still no MAV_TYPE found
if [ $MAV_TYPE == none ]
then
echo "Unknown MAV_TYPE"
param set MAV_TYPE 2
else
param set MAV_TYPE $MAV_TYPE
fi
# Load mixer and configure outputs
sh /etc/init.d/rc.interface
# Start standard multicopter apps
sh /etc/init.d/rc.mc_apps
fi
#
# VTOL setup
#
if [ $VEHICLE_TYPE == vtol ] #前面已经设置MIXER 为caipirinha_vtol
then
if [ $MIXER == none ]
then
echo "VTOL mixer undefined"
fi
if [ $MAV_TYPE == none ]
then
# Use mixer to detect vehicle type
if [ $MIXER == caipirinha_vtol ]
then
set MAV_TYPE 19 #为尾坐式无人机,则设置MAV_TYPE 为19
fi
if [ $MIXER == firefly6 ]
then
set MAV_TYPE 21
fi
if [ $MIXER == quad_x_pusher_vtol ]
then
set MAV_TYPE 22
fi
fi
# Still no MAV_TYPE found
if [ $MAV_TYPE == none ]
then
echo "Unknown MAV_TYPE"
param set MAV_TYPE 19
else
param set MAV_TYPE $MAV_TYPE
fi
# Load mixer and configure outputs
sh /etc/init.d/rc.interface #启动 rc.interface。后边再看
# Start standard vtol apps
sh /etc/init.d/rc.vtol_apps #启动 rc.vtol_apps,里面有姿态估计,位置估计等核心部分
fi
#
# Rover setup
#
if [ $VEHICLE_TYPE == rover ]
then
# 10 is MAV_TYPE_GROUND_ROVER
set MAV_TYPE 10
# Load mixer and configure outputs
sh /etc/init.d/rc.interface
# Start standard rover apps
sh /etc/init.d/rc.axialracing_ax10_apps
param set MAV_TYPE 10
fi
#
# For snapdragon, we need a passthrough mode
# Do not run any mavlink instances since we need the serial port for
# communication with Snapdragon.
#
if [ $VEHICLE_TYPE == passthrough ]
then
mavlink stop-all
commander stop
# Stop multicopter attitude controller if it is running, the controls come
# from Snapdragon.
if mc_att_control stop
then
fi
# Start snapdragon interface on serial port.
if ver hwcmp PX4FMU_V2
then
# On Pixfalcon use the standard telemetry port (Telem 1).
snapdragon_rc_pwm start -d /dev/ttyS1
px4io start
fi
if ver hwcmp PX4FMU_V4
then
# On Pixracer use Telem 2 port (TL2).
snapdragon_rc_pwm start -d /dev/ttyS2
fmu mode_pwm4
fi
pwm failsafe -c 1234 -p 900
pwm disarmed -c 1234 -p 900
# Arm straightaway.
pwm arm
# Use 400 Hz PWM on all channels.
pwm rate -a -r 400
fi
unset MIXER
unset MAV_TYPE
unset OUTPUT_MODE
#
# Start the navigator
#
navigator start
#
# Generic setup (autostart ID not found)
#
if [ $VEHICLE_TYPE == none ]
then
echo "No autostart ID found"
fi
# Start any custom addons
set FEXTRAS /fs/microsd/etc/extras.txt
if [ -f $FEXTRAS ]
then
echo "Addons script: $FEXTRAS"
sh $FEXTRAS
fi
unset FEXTRAS
if ver hwcmp CRAZYFLIE
then
# CF2 shouldn't have an sd card
else
# Run no SD alarm
if [ $LOG_FILE == /dev/null ]
then
# Play SOS
tone_alarm error
fi
fi
# End of autostart
fi
# There is no further script processing, so we can free some RAM
# XXX potentially unset all script variables.
unset TUNE_ERR
# Boot is complete, inform MAVLink app(s) that the system is now fully up and running
mavlink boot_complete
if [ $EXIT_ON_END == yes ]
then
echo "NSH exit"
exit
fi
unset EXIT_ON_END
2.rc.interface文件
#!nsh
#
# Script to configure control interface
#
set SDCARD_MIXERS_PATH /fs/microsd/etc/mixers
if [ $MIXER != none -a $MIXER != skip ]
then
#
# Load main mixer
#
if [ $MIXER_AUX == none -a $USE_IO == yes ]
then
set MIXER_AUX $MIXER.aux #设置MIXER_AUX 为 caipirinha_vtol.aux
fi
# Use the mixer file from the SD-card if it exists
if [ -f $SDCARD_MIXERS_PATH/$MIXER.main.mix ]
then
set MIXER_FILE $SDCARD_MIXERS_PATH/$MIXER.main.mix #设置MIXER_FILE 为 caipirinha_vtol.main.mix
# Try out the old convention, for backward compatibility
else
if [ -f $SDCARD_MIXERS_PATH/$MIXER.mix ]
then
set MIXER_FILE $SDCARD_MIXERS_PATH/$MIXER.mix
else
set MIXER_FILE /etc/mixers/$MIXER.main.mix
fi
fi
if [ $OUTPUT_MODE == mkblctrl ]
then
set OUTPUT_DEV /dev/mkblctrl0
else
set OUTPUT_DEV /dev/pwm_output0
fi
if [ $OUTPUT_MODE == uavcan_esc ]
then
set OUTPUT_DEV /dev/uavcan/esc
fi
if [ $OUTPUT_MODE == tap_esc ]
then
set OUTPUT_DEV /dev/tap_esc
fi
if mixer load $OUTPUT_DEV $MIXER_FILE #加载 caipirinha_vtol.main.mix 文件
then
echo "INFO [init] Mixer: $MIXER_FILE on $OUTPUT_DEV"
else
echo "ERROR [init] Error loading mixer: $MIXER_FILE"
echo "ERROR:[init] Could not load mixer: $MIXER_FILE" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
unset MIXER_FILE
else
if [ $MIXER != skip ]
then
echo "ERROR [init] Mixer not defined"
echo "ERROR [init] Mixer not defined" >> $LOG_FILE
tone_alarm $TUNE_ERR
fi
fi
if [ $OUTPUT_MODE == fmu -o $OUTPUT_MODE == io ]
then
if [ $PWM_OUT != none ] # PWM_OUT 在 caipirinha_vtol 设置为1234
then
#
# Set PWM output frequency
#
if [ $PWM_RATE != none ] #下面的这几个参数没有在启动脚本里找到,但是在qgc的Parmameter里面找到了,主要是设置pwm的最大最小速率等。
then
pwm rate -c $PWM_OUT -r $PWM_RATE
fi
#
# Set disarmed, min and max PWM values
#
if [ $PWM_DISARMED != none ]
then
pwm disarmed -c $PWM_OUT -p $PWM_DISARMED
fi
if [ $PWM_MIN != none ]
then
pwm min -c $PWM_OUT -p $PWM_MIN
fi
if [ $PWM_MAX != none ]
then
pwm max -c $PWM_OUT -p $PWM_MAX
fi
fi
if [ $FAILSAFE != none ]
then
pwm failsafe -d $OUTPUT_DEV $FAILSAFE
fi
fi
# This is a FMUv2+ thing
if ver hwcmp PX4FMU_V1
then
set MIXER_AUX none
fi
#MindPX has not aux mixer
if ver hwcmp MINDPX_V2
then
set MIXER_AUX none
fi
if ver hwcmp CRAZYFLIE
then
set MIXER_AUX none
fi
if ver hwcmp AEROFC_V1
then
set MIXER_AUX none
fi
if [ $MIXER_AUX != none -a $AUX_MODE != none ]
then
#
# Load aux mixer
#
set MIXER_AUX_FILE none
set OUTPUT_AUX_DEV /dev/pwm_output1
if [ -f $SDCARD_MIXERS_PATH/$MIXER_AUX.aux.mix ]
then
set MIXER_AUX_FILE $SDCARD_MIXERS_PATH/$MIXER_AUX.aux.mix
else
if [ -f /etc/mixers/$MIXER_AUX.aux.mix ]
then
set MIXER_AUX_FILE /etc/mixers/$MIXER_AUX.aux.mix
fi
fi
if [ $MIXER_AUX_FILE != none ]
then
if fmu mode_$AUX_MODE
then
# Append aux mixer to main device
if [ $OUTPUT_MODE == hil ]
then
if mixer append $OUTPUT_DEV $MIXER_AUX_FILE
then
echo "INFO [init] Mixer: $MIXER_AUX_FILE appended to $OUTPUT_DEV"
else
echo "ERROR [init] Error appending mixer: $MIXER_AUX_FILE"
echo "ERROR [init] Could not append mixer: $MIXER_AUX_FILE" >> $LOG_FILE
fi
fi
if [ -e $OUTPUT_AUX_DEV -a $OUTPUT_MODE != hil ]
then
if mixer load $OUTPUT_AUX_DEV $MIXER_AUX_FILE
then
echo "INFO [init] Mixer: $MIXER_AUX_FILE on $OUTPUT_AUX_DEV"
else
echo "ERROR [init] Error loading mixer: $MIXER_AUX_FILE"
echo "ERROR [init] Could not load mixer: $MIXER_AUX_FILE" >> $LOG_FILE
fi
else
set PWM_AUX_OUT none
set FAILSAFE_AUX none
fi
else
echo "ERROR: Could not start: fmu mode_pwm" >> $LOG_FILE
tone_alarm $TUNE_ERR
set PWM_AUX_OUT none
set FAILSAFE_AUX none
fi
# Set min / max for aux out and rates
if [ $PWM_AUX_OUT != none ]
then
#
# Set PWM_AUX output frequency
#
if [ $PWM_AUX_RATE != none ]
then
pwm rate -c $PWM_AUX_OUT -r $PWM_AUX_RATE -d $OUTPUT_AUX_DEV
fi
if [ $PWM_AUX_MIN != none ]
then
pwm min -c $PWM_AUX_OUT -p $PWM_AUX_MIN -d $OUTPUT_AUX_DEV
fi
if [ $PWM_AUX_MAX != none ]
then
pwm max -c $PWM_AUX_OUT -p $PWM_AUX_MAX -d $OUTPUT_AUX_DEV
fi
fi
# Set disarmed values for aux out
# Transitional support until all configs
# are updated
if [ $PWM_ACHDIS == none ]
then
set PWM_ACHDIS ${PWM_AUX_OUT}
fi
#
# Set disarmed, min and max PWM_AUX values
#
if [ $PWM_AUX_DISARMED != none -a $PWM_ACHDIS != none ]
then
pwm disarmed -c $PWM_ACHDIS -p $PWM_AUX_DISARMED -d $OUTPUT_AUX_DEV
fi
if [ $FAILSAFE_AUX != none ]
then
pwm failsafe -d $OUTPUT_AUX_DEV $FAILSAFE
fi
fi
fi
unset PWM_OUT
unset PWM_RATE
unset PWM_ACHDIS
unset PWM_MIN
unset PWM_MAX
unset PWM_AUX_OUT
unset PWM_AUX_RATE
unset PWM_AUX_DISARMED
unset PWM_AUX_MIN
unset PWM_AUX_MAX
unset FAILSAFE_AUX
unset FAILSAFE
unset OUTPUT_DEV
unset OUTPUT_AUX_DEV















 1506
1506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









