






本期是我们第二期官方教学,不知道大家有没有跟着我们一起学习第一期的教学呢,如果没有看过的同学可以点击链接进行第一期的学习后再来看我们第二期内容。在第一期我们告诉了大家学习方法,以及如果从零开始使用PX4自驾仪,从最开始的机身配件到各种基础设置,最后让大家上手进行初步试飞。在本期我们会带领大家学习基本概念和一些注意事项。
PX4官方动态 | 带你走进官方教学(一)
本期目录:
什么是无人机
PX4自动驾驶仪
地面站
飞行控制板
传感器
输出模块:电机、伺服器、执行器
电调和电机
电池和电源
无线电控制(RC)
GCS操纵杆控制器
安全开关
数据/遥测无线电
1. 什么是无人机
无人机是一种无人驾驶的“机器人”车辆,可以远程或自主控制。现如今无人机用于许多消费、工业、政府和军事应用 , 主要应用领域包括:航拍/视频、运载货物、赛车、搜索和测量等。
这里的无人机是指各种不同类型的无人机,可用于空中、地面、海上和水下。这些也被称为无人机(UAV)、无人机系统(UAS)、无人地面车辆(UGV)、无人水面车辆(USV)、无人水下航行器(UUV)。
而无人机的“大脑”也就是我们常说的自动驾驶仪,它是由运行在飞行控制器硬件上的飞行堆栈软件组成的。
如果你想了解更多关于应用领域的知识,请查看链接:
https://px4.io/ecosystem/commercial-systems/
2. PX4自动驾驶仪
PX4 是强大的开源自动驾驶飞行堆栈,它的一些主要功能包含有:
控制许多不同的无人机框架/类型,包括:飞机(多旋翼飞机、固定翼飞机和 VTOL)、地面车辆和水下航行器。
控制器、传感器和其他外围设备的绝佳硬件选择。
灵活而强大的飞行模式和安全功能。
除此之外,PX4是无人机平台的核心部分,包括QGroundControl地面站、Pixhawk 硬件,和MAVSDK用于使用 MAVLink 协议与配套计算机、相机和其他硬件集成。
以下需要自学的拓展补充知识,请查看链接:
PX4官网:https://px4.io/
硬件Pixhawk官网:https://pixhawk.org/
Dronecode官网:https://www.dronecode.org/
3. 地面站 Dronecode 地面控制站称为QGroundControl 。您可以使用QGC将 PX4 加载(闪存)到无人机控制硬件上,设置无人机、更改不同参数、获取实时飞行信息以及创建和执行完全自主的任务。 QGC可在 Windows、Android、MacOS 或 Linux 上运行。 下载地址:http://qgroundcontrol.com/downloads/ 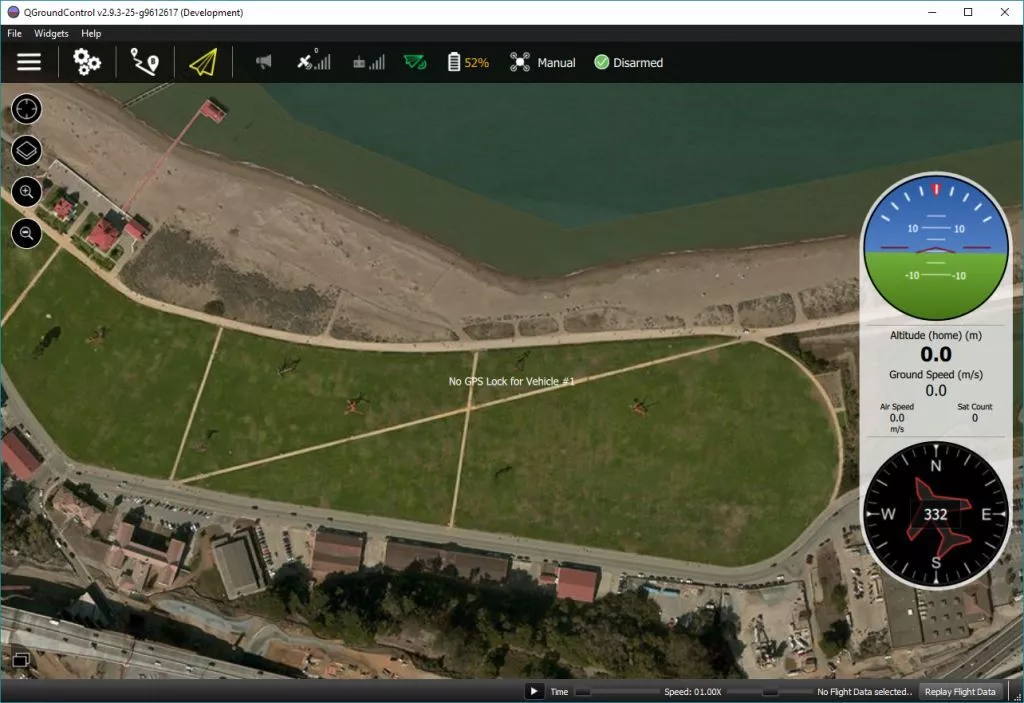
4. 飞行控制板 PX4 最初设计为在Pixhawk 系列控制器上运行,但现在也可以在Linux计算机和其他硬件上运行。 有关更多信息,请参阅网址:https://docs.px4.io/master/en/getting_started/flight_controller_selection.html
5. 传感器 PX4 使用传感器来确定无人机状态(需要稳定并启用自主控制)。该系统最少需要陀螺仪、加速度计、磁力计(罗盘)和气压计。需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。固定翼和 VTOL 车辆还应包括一个空速传感器。
有关更多信息,请参阅: 传感器:https://docs.px4.io/master/en/getting_started/sensor_selection.html 外设:https://docs.px4.io/master/en/peripherals/
6. 输出模块:电机、伺服器、执行器 PX4 使用输出来控制:电机速度(例如通过ESC)、副翼和襟翼等飞行表面、相机触发器、降落伞、抓手和许多其他类型的有效载荷。 例如,下图显示了Pixhawk 4和Pixhawk 4 mini的 PWM 输出端口。 

输出分为MAIN和AUX输出,并单独编号。
通常,MAIN端口用于核心飞行控制,而AUX用于非关键执行器/有效载荷(但AUX如果MAIN车辆类型没有足够的端口,例如 VTOL,则可用于飞行控制)。例如,在通用四轴飞行器中,MAIN输出 1-4 用于相应的电机,而其余MAIN和一些AUX输出用于 RC 直通。
用于飞行控制器输出的实际端口/总线取决于硬件和 PX4 配置。 通常端口映射到 PWM 输出,如上所示,通常是丝网印刷MAIN OUT和AUX OUT.
它们也可能被标记为FMU PWM OUT或IO PWM Out(或其他类似)。Pixhawk 控制器有一个主FMU 板,可能有一个单独的 IO 板。如果有 IO 板,则AUX端口直接连接到 FMU,MAIN端口连接到 IO 板。否则,MAIN端口将连接到 FMU,并且没有AUX端口。FMU 输出端口可以使用D-shot或One-shot协议(以及 PWM),它们提供低得多的延迟行为。这对于需要更好性能的赛车手和其他机身很有用。
输出端口也可以映射到 UAVCAN 节点(例如 UAVCAN电机控制器)。在这种情况下使用输出到节点的(相同)机身映射。
注意事项:
每个输出的特定用途是基于每个机身进行硬编码的。所有机身的输出映射在机身参考中给出。(https://docs.px4.io/master/en/airframes/airframe_reference.html)
飞行控制器可以仅具有MAIN输出(如Pixhawk 4赠送),或者可以具有在任仅6输出MAIN或AUX。确保您选择的控制器为您的机身提供了足够多的正确类型的端口/输出。
因为大多数飞行控制器只有这么多 PWM/Dshot/Oneshot 输出MAIN,AUX所以只有 6-8 个输出。理论上,如果总线支持,则可以有更多的输出(即 UAVCAN 总线不限于这几个节点)。
电调和电机
许多 PX4 无人机使用由飞行控制器通过电子速度控制器 (ESC) 驱动的无刷电机(ESC 将来自飞行控制器的信号转换为提供给电机的适当功率水平)。
有关 PX4 支持哪些 ESC/电机的信息,请参阅:
电调及马达:https://docs.px4.io/master/en/peripherals/esc_motors.html
电调校准:https://docs.px4.io/master/en/advanced_config/esc_calibration.html)
ESC 固件和协议概述:https://oscarliang.com/esc-firmware-protocols/
8. 电池/电源 PX4 无人机通常由锂聚合物 (LiPo) 电池供电。电池通常使用电源模块或电源管理板连接到系统,为飞行控制器和 ESC(用于电机)提供单独的电源。 有关电池和电池配置的信息可以在电池配置和基本组装指南(例如Pixhawk 4 Wiring Quick Start > Power)中找到。
9. 无线电控制(RC) 无线电控制系统(RC)用于手动控制无人机,它由一个远程控制单元组成,该单元使用发射器与接收器通信操纵杆/控制位置。一些遥控系统还可以从自动驾驶仪接收遥测信息。  RC 系统选择解释了如何选择 RC 系统。其他相关主题包括: 无线电/远程控制设置- QGroundControl 中的远程控制配置。 飞行 101 - 学习如何使用遥控器飞行。 FrSky 遥测- 设置 RC 发射器以接收来自 PX4 的遥测/状态更新。 RC系统选择介绍:https://docs.px4.io/master/en/getting_started/rc_transmitter_receiver.html
RC 系统选择解释了如何选择 RC 系统。其他相关主题包括: 无线电/远程控制设置- QGroundControl 中的远程控制配置。 飞行 101 - 学习如何使用遥控器飞行。 FrSky 遥测- 设置 RC 发射器以接收来自 PX4 的遥测/状态更新。 RC系统选择介绍:https://docs.px4.io/master/en/getting_started/rc_transmitter_receiver.html
10. GCS操纵杆控制器 通过QGroundControl连接的计算机操纵杆也可用于手动控制 PX4(QGC 将操纵杆运动转换为通过遥测链接发送的 MAVLink 消息)。这种方法由具有集成地面控制站的地面控制单元使用,例如Auterion Skynav 或UAVComponents MicroNav。操纵杆也常用于在模拟中驾驶车辆。 
11. 安全开关
车辆通常有一个安全开关,必须在车辆可以布防(布防后,电机通电并且螺旋桨可以转动)之前接合该开关。通常安全开关集成在 GPS 单元中,但它也可能是一个单独的物理组件。
注意:安全开关的设置是一种附加机制,需要具备潜在危险意识,安全开关的设计可方阿志以外的出发。
12. 数据/遥测无线电
数据/遥测无线电可以在地面控制站(如QGroundControl)和运行 PX4 的车辆之间提供无线 MAVLink 连接。这使得在车辆飞行时调整参数、实时检查遥测、即时更改任务等成为可能。 数据/遥测无线电介绍:https://docs.px4.io/master/en/telemetry/
基础知识第一部分我们就介绍到这里,剩下的关于配套计算机、SD卡的介绍、布防与撤防、飞行模式、安全设置、航向和方向这些内容在官网都有很详细的内容介绍。我们就不会在这里进行一一介绍,并不是说不介绍就不重要,正相反,这点内容对于后面开发学习起着重要的作用,所以希望学习的大家可以认真学习,我们会在后面进行一个小考核作为测试。
本期PX4更新内容网址:https://docs.px4.io/master/en/getting_started/px4_basic_concepts.html
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!

















 309
309

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









