










背景:
之前在泊车路径规划过程中,碰到关于坐标系转换的问题,因为涉及到几个坐标系,不同的转换方式,在此希望通过文章的方式记录自己知识的过程。
目的:
掌握泊车路径规划过程中,坐标系转换的规律
前提:
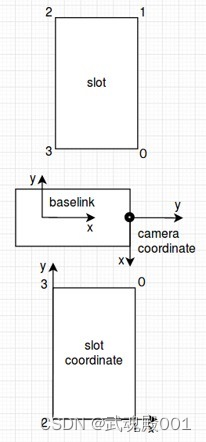
用三个坐标系之间的转换举例,分别是baselink坐标系,原点在后轴中心,x轴指向车头方向;camera坐标系,原点在车头,y坐标系指向车头方向;slot坐标系,原点在车位2号角点,y轴是2->3方向,所有坐标系是右手坐标系
公式:

假设有两个坐标系,A and B,我们希望将坐标系A中的坐标转换到坐标系B中
A是原坐标系,B是目标坐标系
其中 代表坐标系B中的坐标,
代表坐标系B中的坐标,  代表坐标系A中的坐标,
代表坐标系A中的坐标,  代表坐标系A到B的旋转,
代表坐标系A到B的旋转,  代表坐标系A到B的平移
代表坐标系A到B的平移
内容:
内容主要分两部分,概要:
- 知道原始坐标系A的原点以及x轴分别在目标坐标系B中的位置(x, y)和角度theta;
- 知道目标坐标系B的原点以及x轴的航向角在原始坐标系A的位置(x, y)和角度theta.
详细介绍方法:
一. 知道原始坐标系A的原点以及x轴分别在目标坐标系B中的位置(x, y)和角度theta我们取这个原点坐标作为平移量translation,角度作为旋转量rotation
translation = 坐标系A的原点目标坐标系B中的坐标(x, y)
rotation = 坐标系A的x轴在目标坐标系B中的角度theta
bool ConvertPointFromSourceToDestinationCoordinateBaseDestination(
POINT &point, const POINT &translation, const float rotation) {
POINT p;
const float r_cos = cosf(rotation);
const float r_sin = sinf(rotation);
p.x = point.x * r_cos - point.y * r_sin;
p.y = point.x * r_sin + point.y * r_cos;
point.x = p.x + translation.x;
point.y = p.y + translation.y;
return true;
}
第一步,旋转,这个可以这样理解,B坐标系不动,但是B坐标系有一个拷贝坐标系,刚开始时,两者重合,然后拷贝坐标系旋转theta角度,方向和坐标系A重合;
第二步,平移,可以这样理解,将这个已经旋转的B的拷贝坐标系再平移到A的原点。
此时就完成了将坐标系A中的点point通过先旋转再平移,得到在B坐标系中的位置。
举个栗子:baselink->camera
将baselink下面的点转换到camera坐标系
因为知道轴距,所以知道baselink的原点在camera坐标系中的坐标为(0, -(后轴中心到车头距离)),同时,baselink坐标系的x轴在camera坐标系中的角度theta = 90度,所以通过带入上面公式即可得。
二. 知道目标坐标系B的原点以及x轴的航向角在原始坐标系A的位置(x, y)和角度theta
我们取这个原点坐标作为平移量translation,角度作为旋转量rotation
translation = 坐标系B的原点目标坐标系A中的坐标(x, y)
rotation = 坐标系B的x轴在目标坐标系A中的角度theta
bool ConvertPointFromSourceToDestinationCoordinateBaseSource(
POINT &point, const POINT &translation, const float rotation) {
FPOINT p;
const float r_cos = cosf(rotation);
const float r_sin = sinf(rotation);
p.x = point.x - translation.x;
p.y = point.y - translation.y;
point.x = p.x * r_cos + p.y * r_sin;
point.y = p.y * r_cos - p.x * r_sin;
return true;
}
这一部分可以看做和第一部分相反的操作
第一步平移,这个时候可以这样理解,此时有个原坐标系A的拷贝,A首先平移到B坐标系的位置,此时的平移和方法一正好相反,直观公式是用的“-”;
第二步旋转,这个时候请看旋转矩阵,也和方法一旋转方向相反,因为此时是原坐标系旋转theta角度到目标坐标;
举个栗子:
现在有一个环视系统,会输出环视检测的车位信息结果,一般输出检测到的车位点坐标,这些原始坐标通过在camera坐标系中输出,假设,现在得到四个车位在camera坐标系下的角点坐标,然后路径规划过程中,我们希望在一个固定的车位坐标系中进行路径规划,所以希望建立一个以2号角点为原点,2->3为y方向的车位坐标系
于是,因为我们知道(目标坐标系)车位坐标系原点(2号角点)在原坐标系(camera坐标系)中的坐标,同时通过2, 1点之间的关系,通过tan得到车位坐标系x轴在原坐标系中的theta,就满足了方法二所必需的的条件,使用方法二,即可得。
总结
- 如果想知道现在需要什么样的转换,首先应该明白,现在自己手里有什么东西,比如,我们“ 知道原始坐标系A的原点以及x轴分别在目标坐标系B中的位置(x, y)和角度theta”,那么就用方法一,如果“ 知道目标坐标系B的原点以及x轴的航向角在原始坐标系A的位置(x, y)和角度theta”,就用方法二;
- 两种方法的旋转和平移的次序是相反的,同时旋转和平移的量也是相反的;
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









