






1. 基本概念
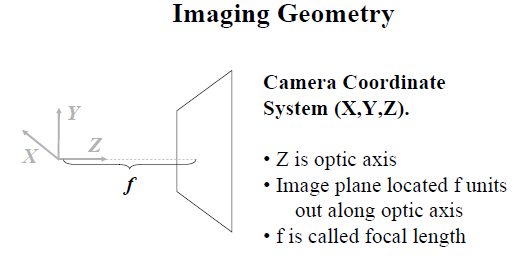
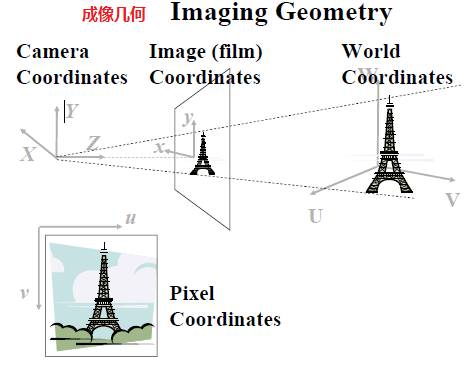
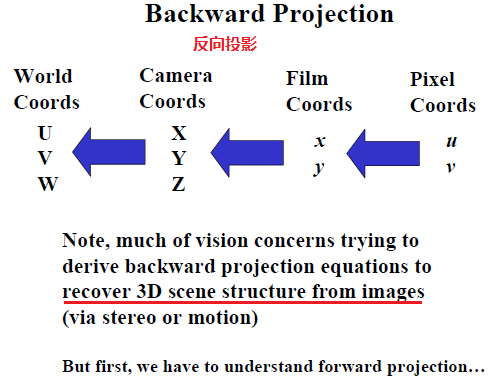
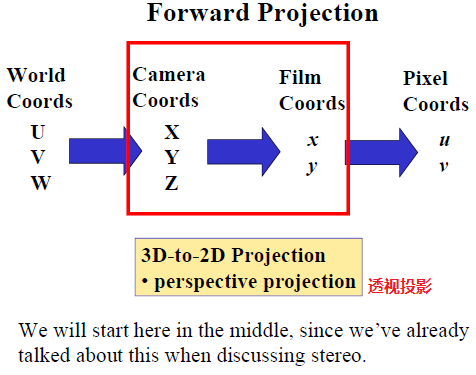
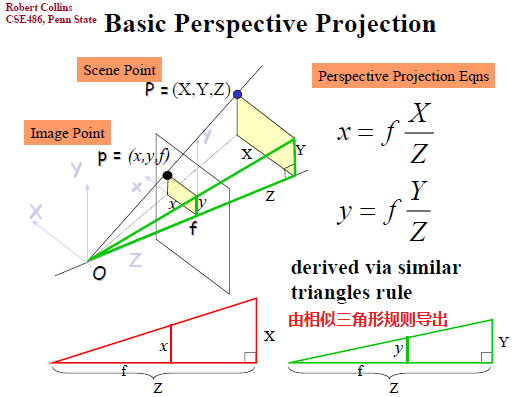
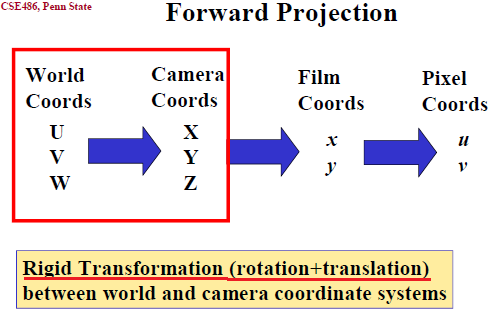
2. 投影
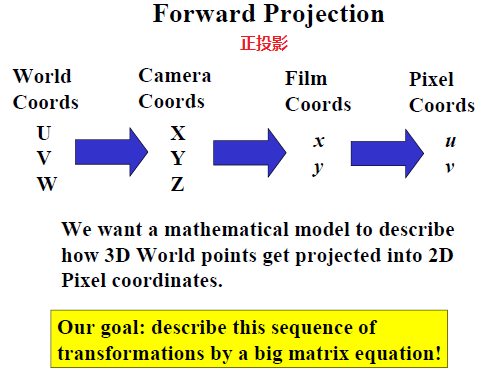
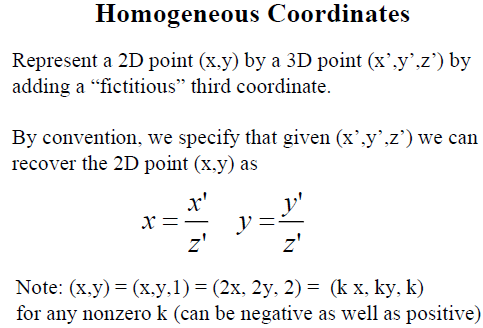
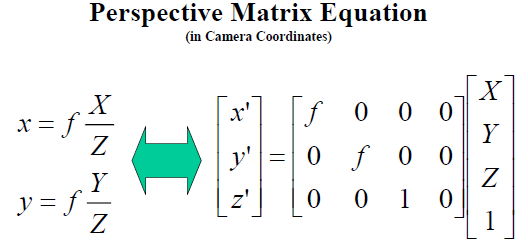
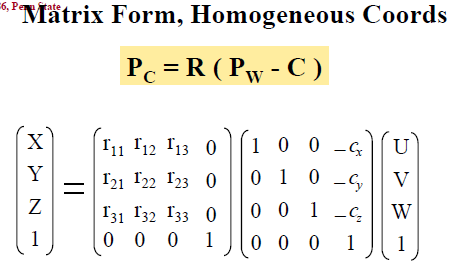
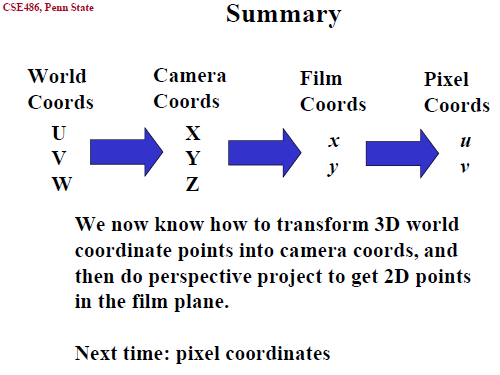
So how do we represent this as a matrix equation?
We need to introduce homogeneous coordinates(齐次坐标).
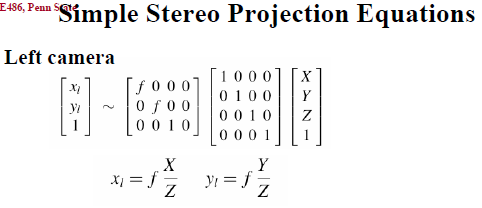
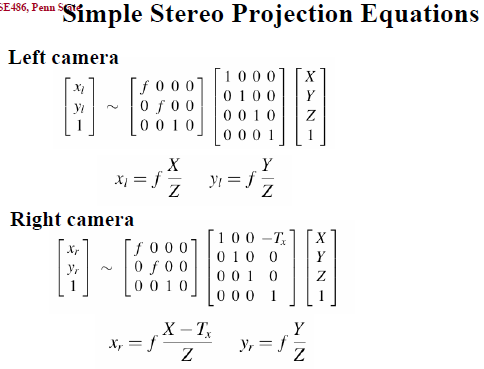
2.1 透视投影
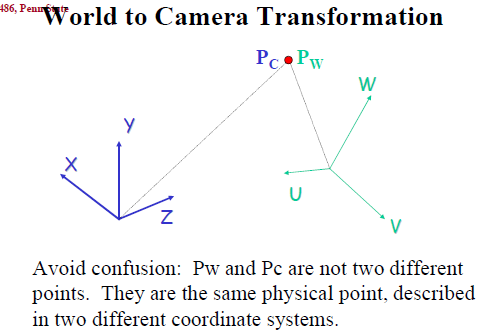
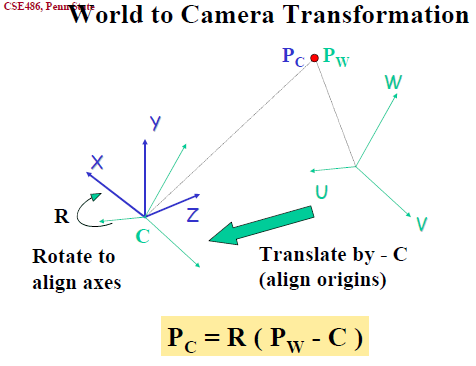
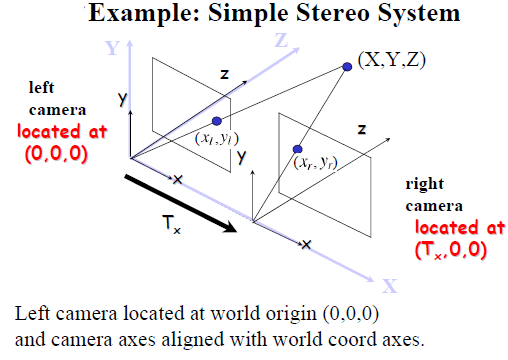
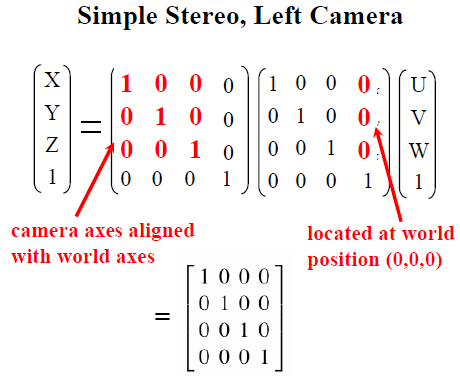
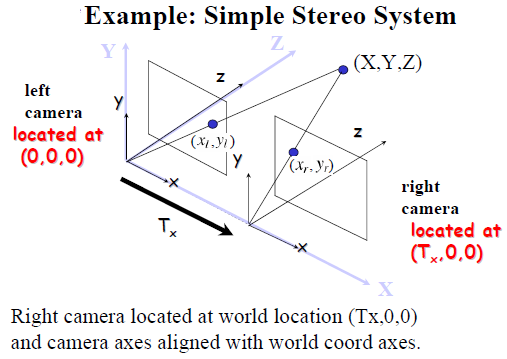
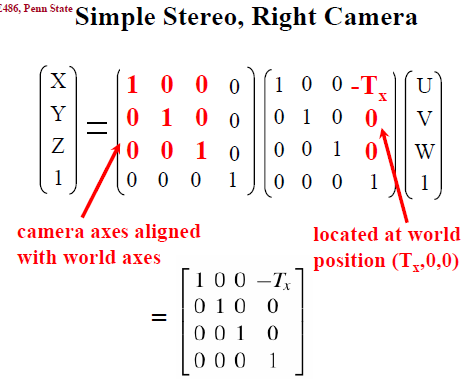
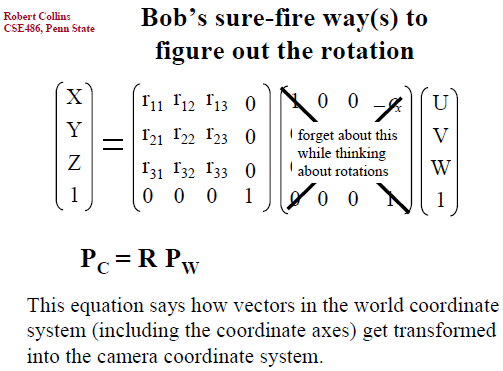
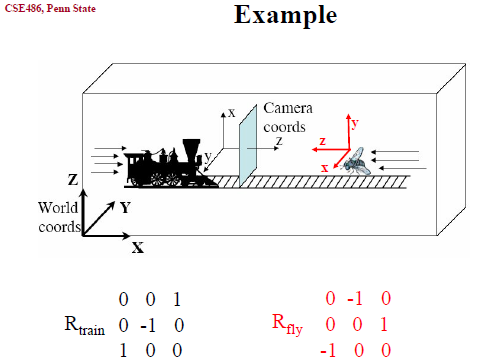
2.2 世界->摄像机坐标变换
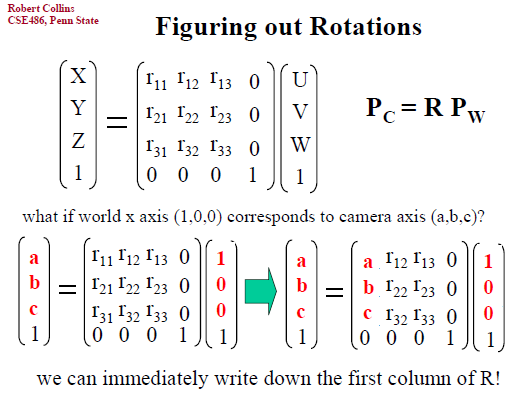
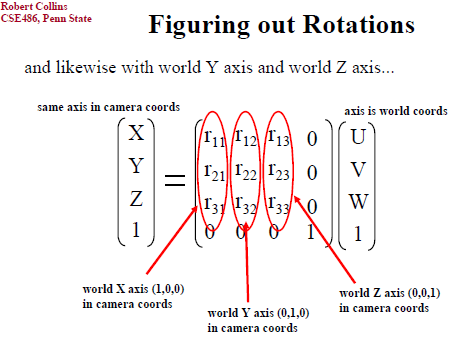
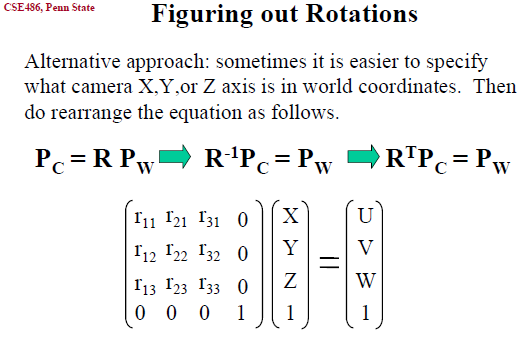
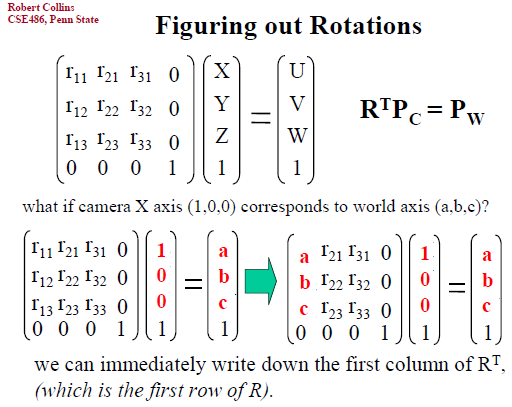
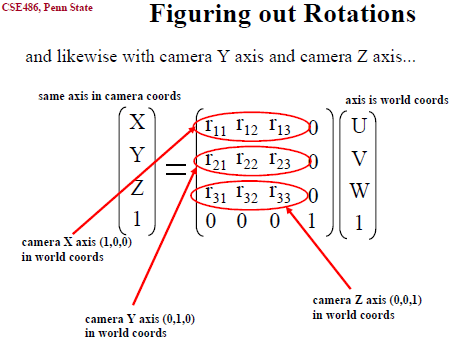
2.3 计算旋转矩阵简单方法
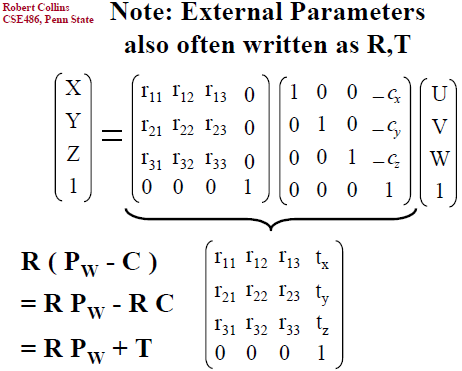
2.4 摄像机外部参数(R,T)
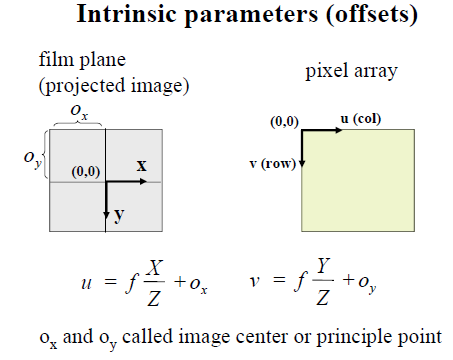
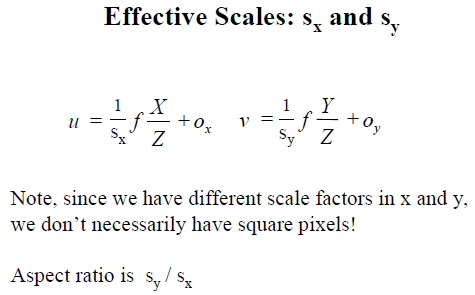
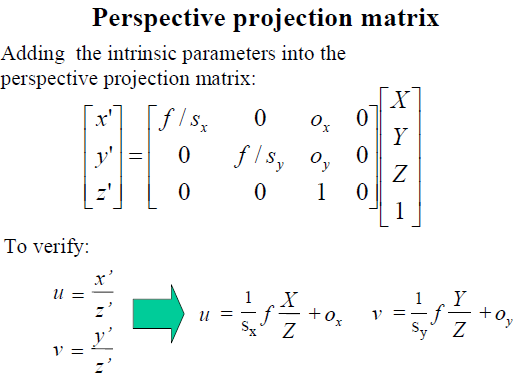
2.5 摄像机内部参数
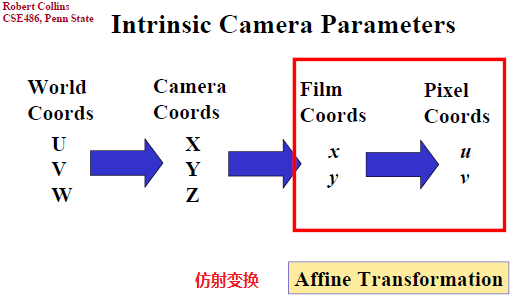
仿射变换=线性变换+平移

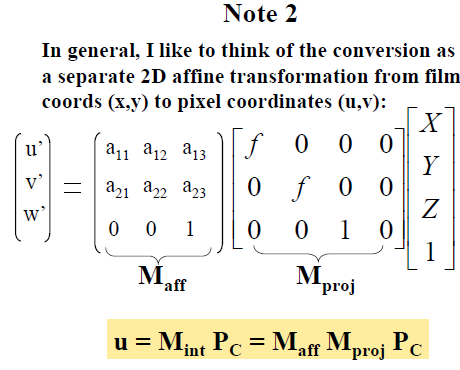
“affine” transformation: it is a type of 2D to 2D mapping defined by 6 parameters.
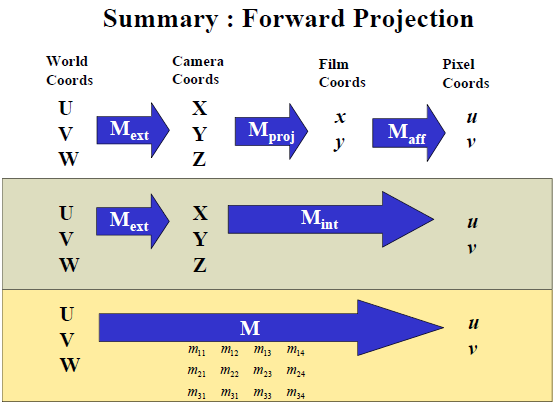
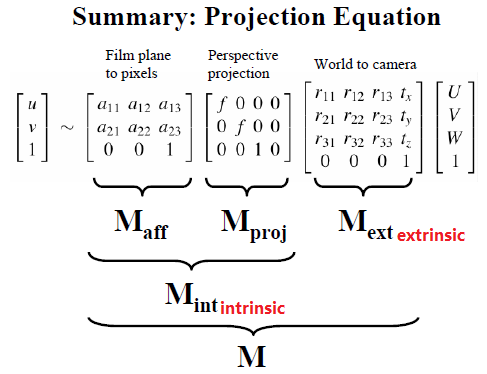
2.6 投影总结















 535
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









