







这是一篇基于传统机器学习的行人检测的博文,和现在的深度学习的效果和速度都不能相提并论,但是在深度学习之下,确实一个非常值得学习的行人检测的方法。与传统的HOG,DPM相比,该方法主要体现在速度快上,在VGA(640*480)输出下,达到了20fps的速度,并且是单线程,无GPU的条件,比HOG和DPM都要快,同时在测试中表现出了不俗的效果。
作者是新加坡南洋理工的,吴建鑫,在其个人主页开源了一系列的论文和程序,非常值得学习。作者基于轮廓线索(Contour Cues)分别在TPAMI和ICRA上发了2篇文章,详见博文References。
整体思想:
(1) CENTRIST(CENsus TRansform hISTogram)特征描述子
作者提出了CENTRIST特征描述子。改特征描述子主要获取相邻像素的比对值。在一个3*3的像素块中,周围的8个像素依次和中间的像素做比对,如果高于中间的像素,则输出的特征矩阵的相应位置为0,如果低于中间的像素则为1,然后就会产生一个3*3的特征矩阵,然后对此矩阵从上到下,从左到右进行2进制编码,最后得到一个10进制的介于[0,255]之间的编码值。

(2)检测框架
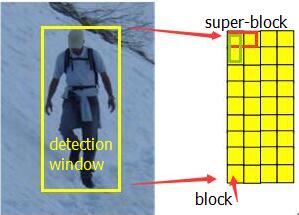
规定,检测窗口的大小为108*36,然后将该检测窗口划分为9*4个block,每相邻的2个block作为一个super-block,并用该super-block来提取CENTRIST特征,一个检测窗口一共可以产生(9-1)*(4-1)=8*3=24个super-block,每个CENTRIST特征有0-255共256个特征,最终将生成256*24=6144维的特征。如下图所示的效果图,黄色框为detection window,黑色框为block,红色和绿色框为super-block。
(3)线性分类器
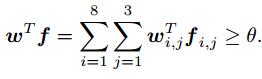
w为已经训练好的线性分类器的权值参数,为6144维,i,j分别表示super-block的长宽维度,fij为提取出的特征,seita为阈值,最终,如果大于该阈值,就认为是行人,否则认为是背景。
检测效果:
从Inria数据集中随机选了一张图片做测试,测试效果如下,可见检测效果还是很不错的。

References:
https://sites.google.com/site/wujx2001/home/c4
Wu J, Rehg J M. CENTRIST: A visual descriptorfor scene categorization[J]. IEEE transactions on pattern analysis and machineintelligence, 2011, 33(8): 1489-1501.
Wu J, Geyer C, Rehg J M. Real-time humandetection using contour cues[C]//Robotics and Automation (ICRA), 2011 IEEEInternational Conference on. IEEE, 2011: 860-867.














 8893
8893











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









