







1.
安装RPLIDAR包
建立catkin工作空间,在其src目录下git包:
git clone https://github.com/robopeak/rplidar_ros
返回工作空间 catkin_make编译
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="rplidar_ros" type="rplidarNode" name="rplidarNode" output="screen">
<param name="serial_port" type="string" value="/dev/ttyUSB0"/>
<param name="serial_baudrate" type="int" value="115200"/>
<param name="frame_id" type="string" value="laser"/>
<param name="inverted" type="bool" value="false"/>
<param name="angle_compensate" type="bool" value="true"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
运行这个launch文件,可以使用hector_mapping建地图。
如下图所示
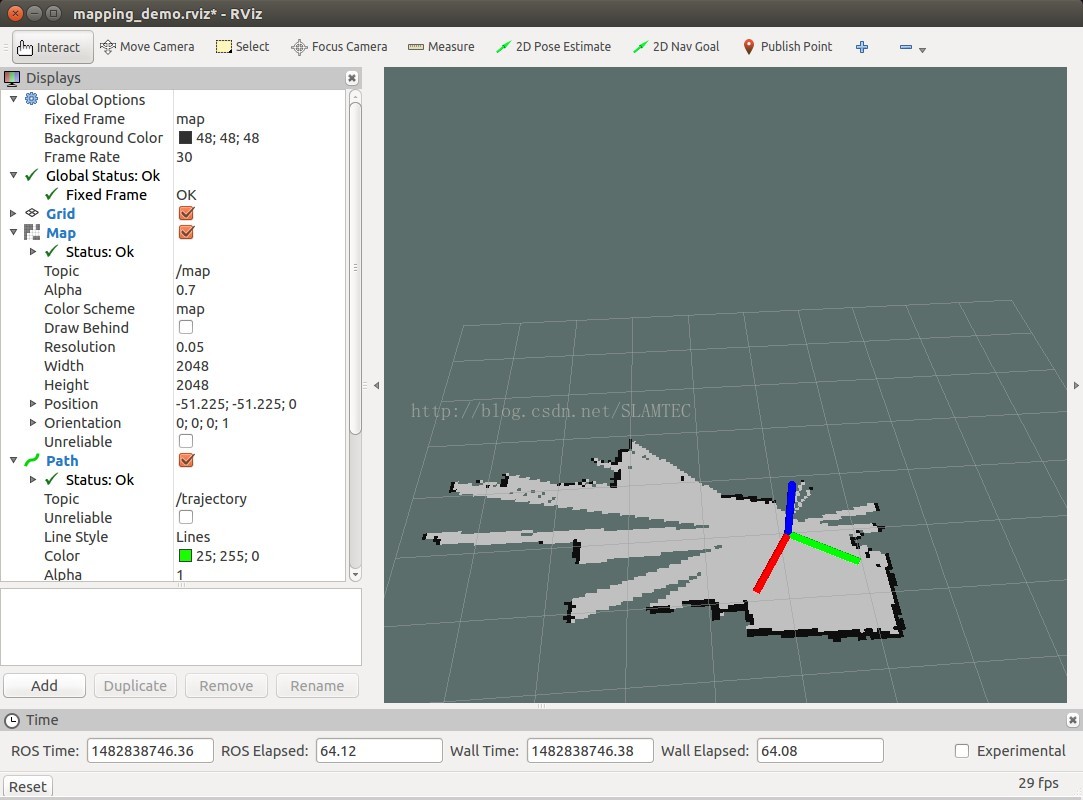
要注意hector_mapping是不带里程计的,手拿着都可以建地图。
Steven.Zhang
建立catkin工作空间,在其src目录下git包:
git clone https://github.com/robopeak/rplidar_ros
返回工作空间 catkin_make编译
2. 下载安装hector_mapping
sudo apt-get install ros-indigo-hector-slam
3. 在rplidar_ros/launch/目录下添加 hector_mapping_demo.launch文件
文件如下:<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="rplidar_ros" type="rplidarNode" name="rplidarNode" output="screen">
<param name="serial_port" type="string" value="/dev/ttyUSB0"/>
<param name="serial_baudrate" type="int" value="115200"/>
<param name="frame_id" type="string" value="laser"/>
<param name="inverted" type="bool" value="false"/>
<param name="angle_compensate" type="bool" value="true"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
运行这个launch文件,可以使用hector_mapping建地图。
如下图所示
要注意hector_mapping是不带里程计的,手拿着都可以建地图。
Steven.Zhang
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









