 完成ROS初级教程后的学习规划
完成ROS初级教程后的学习规划





 在完成ROS的初级教程后,本文档提供了一个良好的教学大纲,包括理解ROS官网布局、复习Stack和Package结构,以及后续学习路径。推荐的资源有ROS wiki、API文档和相关教材。接下来的计划涉及机器人仿真实验、RViz的探索、TF的理解以及更深入的ROS Industrial学习。通过使用模拟器、RViz和理解TF,逐步掌握ROS在机器人控制和导航中的应用。
在完成ROS的初级教程后,本文档提供了一个良好的教学大纲,包括理解ROS官网布局、复习Stack和Package结构,以及后续学习路径。推荐的资源有ROS wiki、API文档和相关教材。接下来的计划涉及机器人仿真实验、RViz的探索、TF的理解以及更深入的ROS Industrial学习。通过使用模拟器、RViz和理解TF,逐步掌握ROS在机器人控制和导航中的应用。
完成了初级的教程以后
完成了初级的教程,我们理解了概念,但还需掌握运用ROS开发机器人的方法。
首先,要知道如何学习ROS,获取有关ROS的资讯。主要的学习和参考材料如下:
- ROS wiki官网的使用
- ROS 官网的API文档
- ROS 第三方教材,书籍
- 本博客的“ROS进阶学习手记”将是一个比较实用的路径
一个比较好的ROS教学大纲:
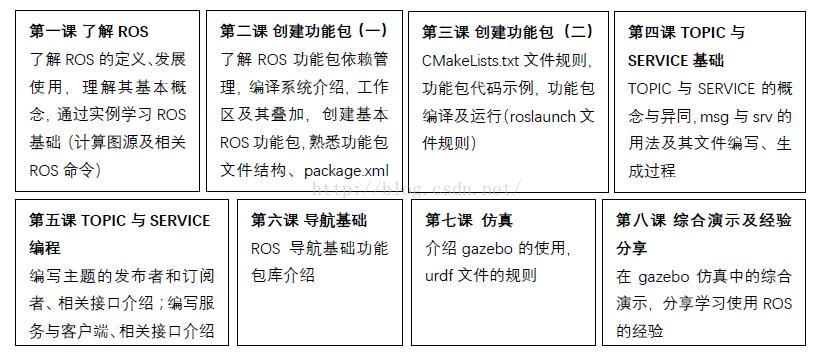
1. 关于ROS官网的layout(页面结构)情况
关于ROS官网的layout(资源分布)情况,我们要好好了解:http://wiki.ros.org/ROS/Tutorials/NavigatingTheWiki
- LandingPage上的导航栏主要有:文档, 包, 新闻三个栏目
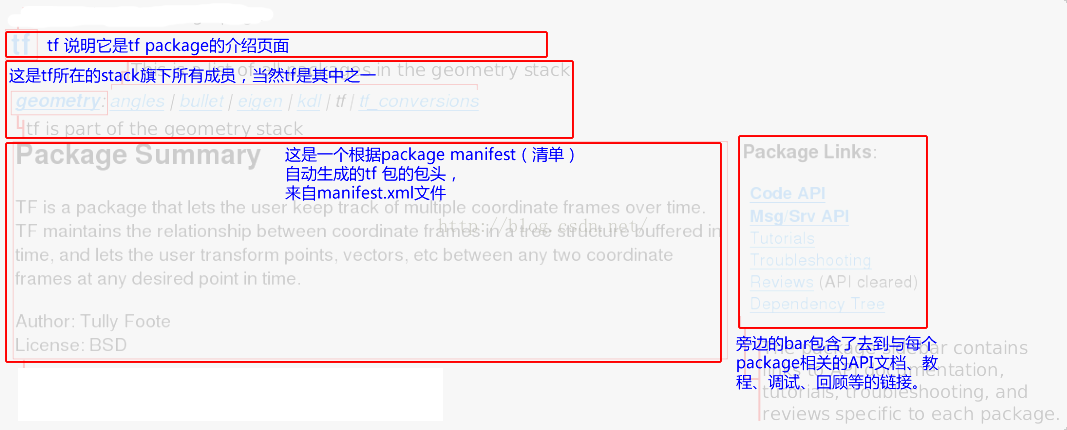
- 在ROS Package Pages里,结构是如下:
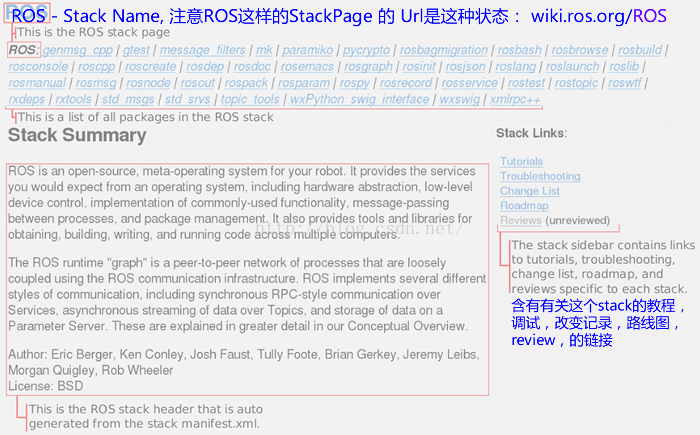
- 在ROS Stack Pages里,结构是如下:
2. 复习: ROS Stack Package等各元件结构:
[Stack1][Package1]
[Nodes1]
[Nodes2]
[Messages]
[Services]
[Libraries]
[Tools]
[/Package1]
[Package2]
[Nodes]
[Messages]
[Services]
[Libraries]
[Tools]
[/Package2]
[/Stack1]
[Stack2]
...
[/Stack2]
-----------------------------------
3. 可供参考的材料
&nb
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 23万+
23万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









