







首先,关于Dynamic Reconfig 的基本的操作和tutorial,官网上比较多,之前我的一篇文章也写过这个:http://blog.csdn.net/yaked/article/details/44924485
最近,因为自己刚把youbot的手臂控制做了一下,那个是在程序中写死位置,编译,运行程序让他动作的。想改变点位必须每次都重新编译再运行,比较麻烦。如果用dynamic reconfigure就可以实时操控机械臂和夹子的运动了。
1. cfg文件的编写
机械臂的5个关节,就是电机角度,单位是弧度,夹子的开合也是2个参数,单位是米,注意:夹子可以分开控制的,并不是指定一个夹子间距。所以,这里会有两个参数。
建立一个cfg文件夹,放入一个名为youbot_arm_gripper.cfg的文件,代码如下:
#!/usr/bin/env python
PACKAGE = "youbot_ros_simple_trajectory"
from dynamic_reconfigure.parameter_generator_catkin import *
gen = ParameterGenerator()
# Name Type Level Description Default Min Max
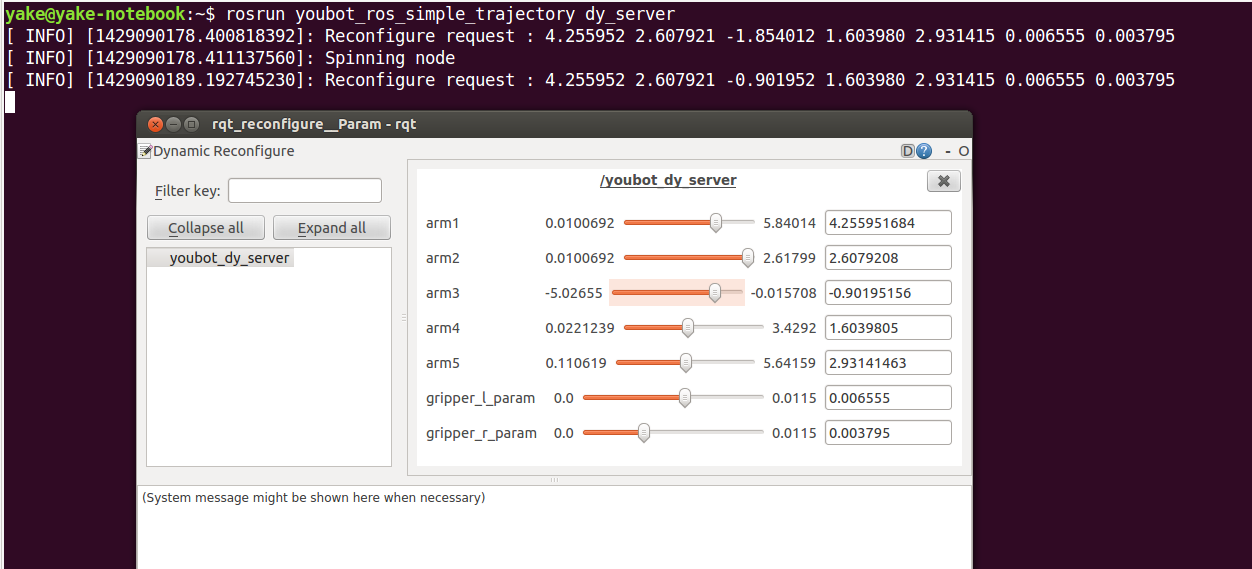
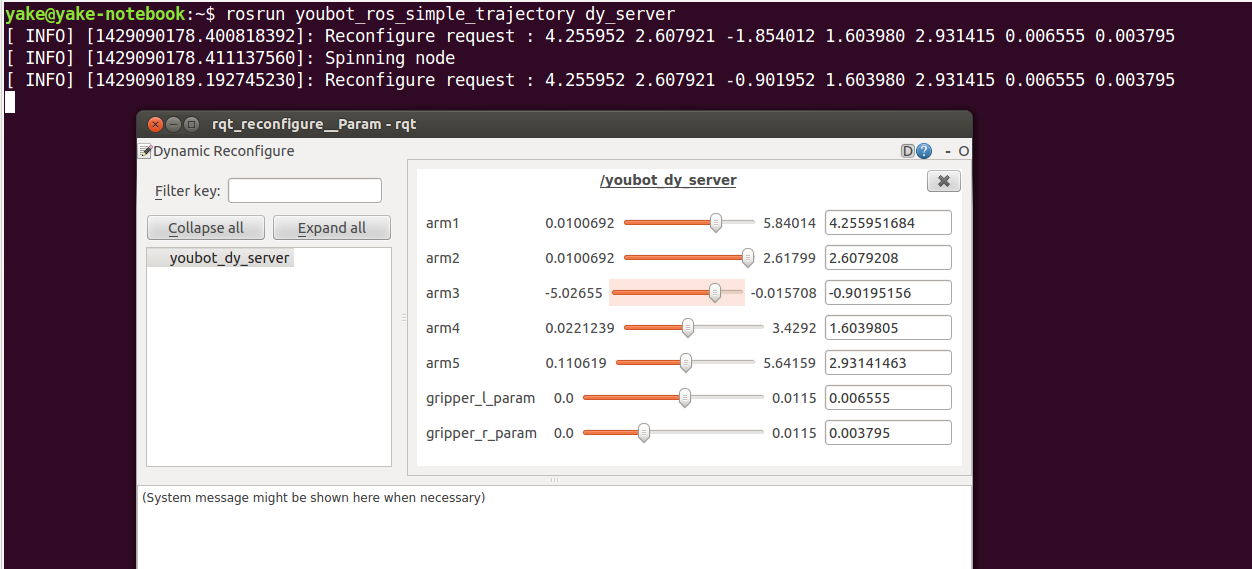
gen.add("arm1", double_t, 0, "An double radian parameter", 0.11, 0.0100692, 5.84014)
gen.add("arm2", double_t, 0, "An double radian parameter", 0.11, 0.0100692, 2.61799)
gen.add("arm3", double_t, 0, "An double radian parameter", -0.11, -5.02655, -0.015708)
gen.add("arm4", double_t, 0, "An double radian parameter", 0.11, 0.0221239, 3.4292)
gen.add("arm5", double_t, 0, "An double radian parameter", 0.12, 0.110619, 5.64159)
gen.add("gripper_l_param", double_t, 0, "An double parameter unit meter", 0.008, 0, 0.0115)
gen.add("gripper_r_param", double_t, 0, "An double parameter unit meter", 0.008, 0, 0.0115)
#gen.add("double_param", double_t, 0, "A double parameter", .5, 0, 1)
#gen.add("str_param", str_t, 0, "A string parameter", "Hello World")
#gen.add("bool_param", bool_t, 0, "A Boolean parameter", True)
exit(gen.generate(PACKAGE, "youbot_ros_simple_trajectory", "youbot_arm_gripper"))之前的那篇文章中,我提过cfg文件的名字要是最后一行程序的第三个参数,注意保持一致。
2. XML文件
<?xml version="1.0"?>
<package>
<name>youbot_ros_simple_trajectory</name>
<version>0.0.0</version>
<description>The youbot_ros_simple_trajectory package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="yake@todo.todo">yake</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but mutiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/youbot_ros_simple_trajectory</url> -->
<!-- Author tags are optional, mutiple are allowed, one per tag -->
<!-- Authors do not have to be maintianers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *_depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use build_depend for packages you need at compile time: -->
<build_depend>message_generation</build_depend>
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use run_depend for packages you need at runtime: -->
<run_depend>message_runtime</run_depend>
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>actionlib</build_depend>
<build_depend>control_msgs</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>trajectory_msgs</build_depend>
<build_depend>brics_actuator</build_depend>
<build_depend>dynamic_reconfigure</build_depend>
<build_depend>std_msgs</build_depend>
<run_depend>actionlib</run_depend>
<run_depend>control_msgs</run_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>trajectory_msgs</run_depend>
<run_depend>brics_actuator</run_depend>
<run_depend>dynamic_reconfigure</run_depend>
<run_depend>std_msgs</run_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>3. CMakeList
cmake_minimum_required(VERSION 2.8.3)
project(youbot_ros_simple_trajectory)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
actionlib
control_msgs
roscpp
rospy
trajectory_msgs
brics_actuator
dynamic_reconfigure
std_msgs
message_generation
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependencies might have been
## pulled in transitively but can be declared for certainty nonetheless:
## * add a build_depend tag for "message_generation"
## * add a run_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
#add_message_files(
# FILES
#youbot_ros_simple_trajectory_Data.msg
#)
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
#generate_messages(
#DEPENDENCIES
#control_msgs
#trajectory_msgs
#)
generate_dynamic_reconfigure_options(
cfg/youbot_arm_gripper.cfg
#...
)
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if you package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
INCLUDE_DIRS include
#LIBRARIES youbot_ros_simple_trajectory
CATKIN_DEPENDS actionlib control_msgs roscpp rospy trajectory_msgs brics_actuator dynamic_reconfigure std_msgs message_runtime
#DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
# include_directories(include)
include_directories(
${catkin_INCLUDE_DIRS}
)
include_directories(${dynamic_reconfigure_PACKAGE_PATH}/cmake/cfgbuild.cmake)
## Declare a cpp library
# add_library(youbot_ros_simple_trajectory
# src/${PROJECT_NAME}/youbot_ros_simple_trajectory.cpp
# )
## Declare a cpp executable
add_executable(youbot_ros_p2p src/youbot_ros_simple_trajectory.cpp)
add_executable(youbot_ctl src/youbot_trajectory_controller.cpp)
add_dependencies(youbot_ctl youbot_ros_simple_trajectory_generate_messages_cpp)
add_dependencies(youbot_ctl ${PROJECT_NAME}_gencfg)
## Add cmake target dependencies of the executable/library
## as an example, message headers may need to be generated before nodes
add_executable(dy_server src/dy_server.cpp)
add_dependencies(dy_server ${PROJECT_NAME}_gencfg)
add_dependencies(dy_server youbot_ros_simple_trajectory_generate_messages_cpp)
## Specify libraries to link a library or executable target against
target_link_libraries(youbot_ros_p2p
${catkin_LIBRARIES}
)
target_link_libraries(youbot_ctl
${catkin_LIBRARIES}
)
target_link_libraries(dy_server
${catkin_LIBRARIES}
)
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# install(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables and/or libraries for installation
# install(TARGETS youbot_ros_simple_trajectory youbot_ros_simple_trajectory_node
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_youbot_ros_simple_trajectory.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)4. cpp文件中的单元测试(unit test)
在这里我说一下,我们做过的关于tutorials一般是写一个server和一个client,一开始,我也一直纠结在这个地方,因为如果要那样的话,我还得分出一个node来写client,所以最开始,我尝试了一下,并没有和上一篇的程序整个结合起来,相当于只是单独测试dynamic reconfigure这个模块。
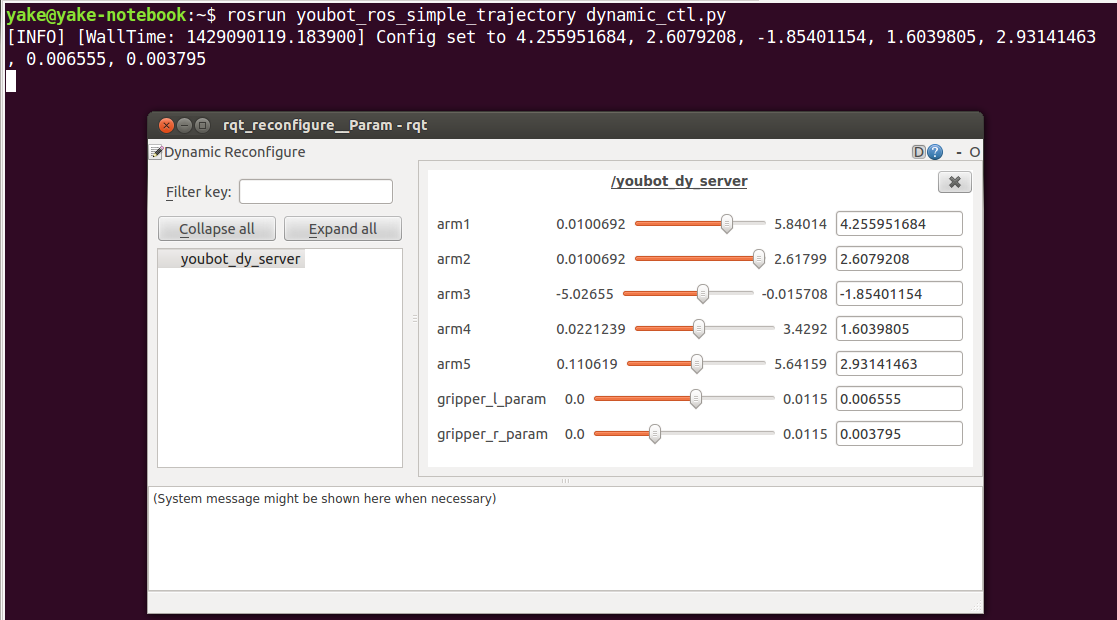
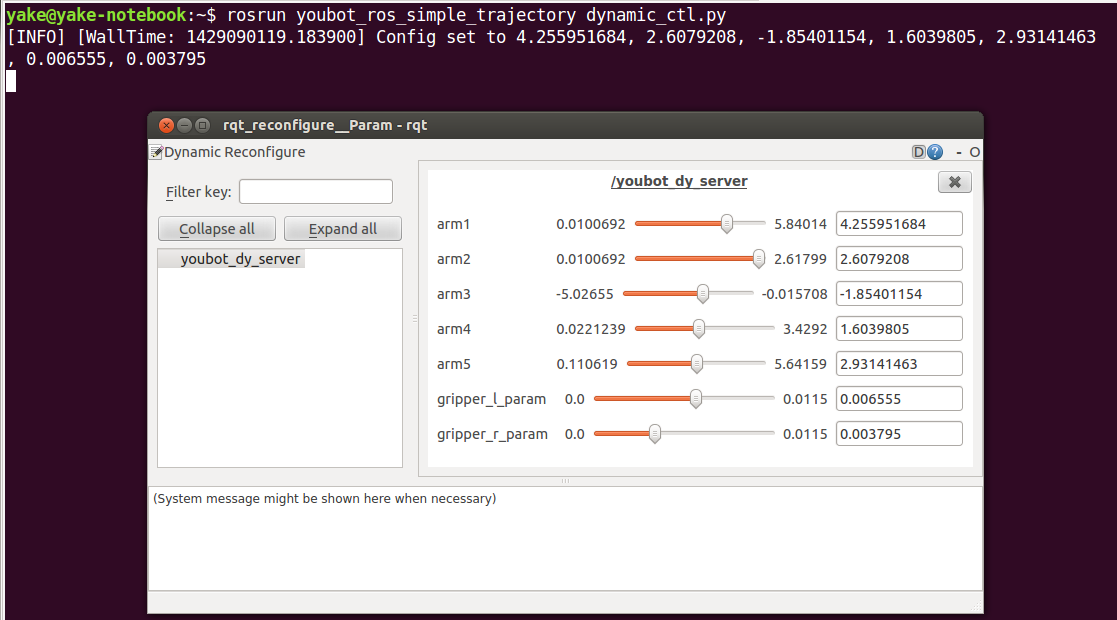
一个是server一个是client, 到这里,我们可以说GUI和程序就已经联系上了,这两个小程序是来自官方的tutorial
http://wiki.ros.org/dynamic_reconfigure/Tutorials
你也可以改改试试看
5. cpp文件深入
先说思路,以前控制做法是将5个角度与gripper的2个参数放在数组中,既然是动态调整,我们就必须给它五个参数和2个gripper一个存放的地方,先由GUI 读取存到这7个变量上,再依次赋值给数组。实际中,是怎么处理的呢,我先放上程序:
#include <iostream>
#include <assert.h>
#include <ros/ros.h>
#include <boost/units/io.hpp>
#include <boost/units/systems/angle/degrees.hpp>
#include <boost/units/conversion.hpp>
#include <boost/units/systems/si/length.hpp>
#include <boost/units/systems/si/plane_angle.hpp>
#include "trajectory_msgs/JointTrajectory.h"
#include "brics_actuator/CartesianWrench.h"
#include "brics_actuator/JointPositions.h"
#include <control_msgs/FollowJointTrajectoryActionGoal.h>
#include <dynamic_reconfigure/server.h>
#include "youbot_ros_simple_trajectory/youbot_arm_gripperConfig.h"
using namespace std;
static const string JOINTNAME_PRE = "arm_joint_";
static const string GRIPPER_JOINTNAME_PRE = "gripper_finger_joint_";
static const uint NUM_ARM_JOINTS = 5;
static const uint NUM_GRIPPER_JOINTS = 2;
ros::Publisher armPositionsPublisher;
ros::Publisher gripperPositionPublisher;
vector<control_msgs::FollowJointTrajectoryActionGoal::ConstPtr> trajectories;
brics_actuator::JointPositions arm_command;
brics_actuator::JointPositions gripper_command;
vector <brics_actuator::JointValue> armJointPositions;
vector <brics_actuator::JointValue> gripperJointPositions;
// Declare variables that can be modified by launch file or command line.
double arm1_ = 0.11;
double arm2_ = 0.11;
double arm3_ = -0.11;
double arm4_ = 0.11;
double arm5_ = 0.12;
double gripper_l_param_ = 0.008;
double gripper_r_param_= 0.008;
int rate;
string topic;
//static const double INIT_POS[] = {2.94961, 1.352, -2.591, 0.1, 0.12}; // Twist fold
//static const double INIT_POS[] = {2.56, 1.05, -2.43, 1.73, 0.12}; // Upstraight
//static const double INIT_POS[] = {0.11, 0.11, -0.11, 0.11, 0.12}; // Home
//static const double Gripper_Init_Pos[] = {0.008, 0.008};
double INIT_POS[] = {arm1_, arm2_, arm3_, arm4_, arm5_}; // Home
double Gripper_Init_Pos[] = {gripper_l_param_, gripper_r_param_};
// dynamic callback
void callback(youbot_ros_simple_trajectory::youbot_arm_gripperConfig &config, uint32_t level)
{
ROS_INFO("Reconfigure Server received from GUI : %f %f %lf %f %f %f %f ",
config.arm1,
config.arm2,
config.arm3,
config.arm4,
config.arm5,
config.gripper_l_param,
config.gripper_r_param
);
arm1_ = config.arm1;
arm2_ = config.arm2;
arm3_ = config.arm3;
arm4_ = config.arm4;
arm5_ = config.arm5;
gripper_l_param_ = config.gripper_l_param;
gripper_r_param_ = config.gripper_r_param;
double INIT_POS[] = {arm1_, arm2_, arm3_, arm4_, arm5_}; // Add GUI arguments to array
double Gripper_Init_Pos[] = {gripper_l_param_, gripper_r_param_};
ROS_INFO("%f %f", INIT_POS[2], Gripper_Init_Pos[1]);
// do sotmehing for now
std::stringstream jointName;
for (int i = 0; i < NUM_ARM_JOINTS; ++i)
{
jointName.str("");
jointName << JOINTNAME_PRE << (i + 1);
arm_command.positions[i].joint_uri = jointName.str();
arm_command.positions[i].value = INIT_POS[i];
arm_command.positions[i].unit = boost::units::to_string(boost::units::si::radians);
}
armPositionsPublisher.publish(arm_command);
cout << arm_command << endl;
for( int k = 0; k < NUM_GRIPPER_JOINTS; ++k)
{
std::stringstream gripperJointName;
gripperJointName.str("");
(k == 0) ? gripperJointName<< GRIPPER_JOINTNAME_PRE << "l": (gripperJointName<< GRIPPER_JOINTNAME_PRE << "r");
gripper_command.positions[k].joint_uri = gripperJointName.str();
gripper_command.positions[k].value = Gripper_Init_Pos[k];
gripper_command.positions[k].unit = boost::units::to_string(boost::units::si::meter);
}
gripperPositionPublisher.publish(gripper_command);
cout << gripper_command << endl;
}
void trajectoryCallback(const control_msgs::FollowJointTrajectoryActionGoal::ConstPtr& msg)
{
ROS_INFO("callback: Trajectory received");
//cout << "Msg-Header" << endl << msg->header << endl;
trajectories.push_back(msg);
}
void moveToInitPos(brics_actuator::JointPositions &command)
{
std::stringstream jointName;
for (int i = 0; i < NUM_ARM_JOINTS; ++i)
{
jointName.str("");
jointName << JOINTNAME_PRE << (i + 1);
command.positions[i].joint_uri = jointName.str();
command.positions[i].value = INIT_POS[i];
command.positions[i].unit = boost::units::to_string(boost::units::si::radians);
cout << "Joint " << command.positions[i].joint_uri << " = " << command.positions[i].value << " " << command.positions[i].unit << endl;
}
cout << command << endl;
armPositionsPublisher.publish(command); // trully send
cout << "sending command for arm joint init position... and wait" << endl;
ROS_INFO("End of arm_joint_init-pos");
// ros::Duration(5).sleep();
}
void moveToGripperInitPos(brics_actuator::JointPositions &command)
{
std::stringstream gripperJointName;
for( int k = 0; k < NUM_GRIPPER_JOINTS; ++k)
{
gripperJointName.str("");
(k == 0) ? gripperJointName<< GRIPPER_JOINTNAME_PRE << "l": (gripperJointName<< GRIPPER_JOINTNAME_PRE << "r");
command.positions[k].joint_uri = gripperJointName.str();
command.positions[k].value = Gripper_Init_Pos[k];
command.positions[k].unit = boost::units::to_string(boost::units::si::meter);
cout << "Joint " << command.positions[k].joint_uri << " = " << command.positions[k].value << " " << command.positions[k].unit << endl;
}
cout << command << endl;
gripperPositionPublisher.publish(command); // trully send
cout << "command for gripper joint init position... and wait" << endl;
ROS_INFO("End of gripper_joint_init-pos");
}
int main(int argc, char **argv) {
ros::init(argc, argv, "youbot_trajectory_controller");
ros::NodeHandle n;
uint loop_counter = 0;
armJointPositions.resize(NUM_ARM_JOINTS);
gripperJointPositions.resize(NUM_GRIPPER_JOINTS);
arm_command.positions = armJointPositions;
gripper_command.positions = gripperJointPositions;
armPositionsPublisher = n.advertise<brics_actuator::JointPositions > ("arm_1/arm_controller/position_command", 1);
gripperPositionPublisher = n.advertise<brics_actuator::JointPositions> ("arm_1/gripper_controller/position_command", 1);
ros::Subscriber armTrajectory;
armTrajectory = n.subscribe("/arm_controller/follow_joint_trajectory/goal", 1, trajectoryCallback);
ros::Duration(1).sleep();
dynamic_reconfigure::Server<youbot_ros_simple_trajectory::youbot_arm_gripperConfig> server;
dynamic_reconfigure::Server<youbot_ros_simple_trajectory::youbot_arm_gripperConfig>::CallbackType f;
f = boost::bind(&callback, _1, _2);
server.setCallback(f);
moveToInitPos(arm_command);
moveToGripperInitPos(gripper_command);
//ros::Duration(10).sleep();
ROS_INFO("Init Pos for arm and gripper have reached.");
ros::Rate r(40);
// Main loop.
while (n.ok())
{
ros::spinOnce();
r.sleep();
}
return 0;
}
实际中,我们有一个callback函数,每次动态改变GUI上的内容,就会调用它,在callback函数中,我们就进行了之前讨论的操作,先保存数据,再赋值给数组,最后封装,将消息发送出去就行了。
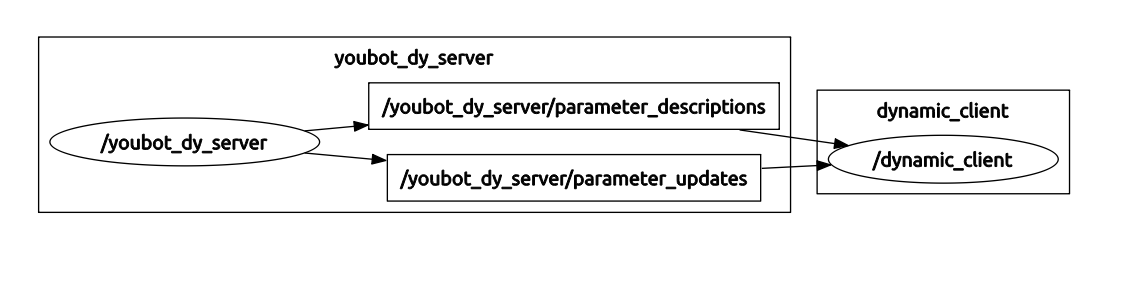
最终,我们的节点图如下:
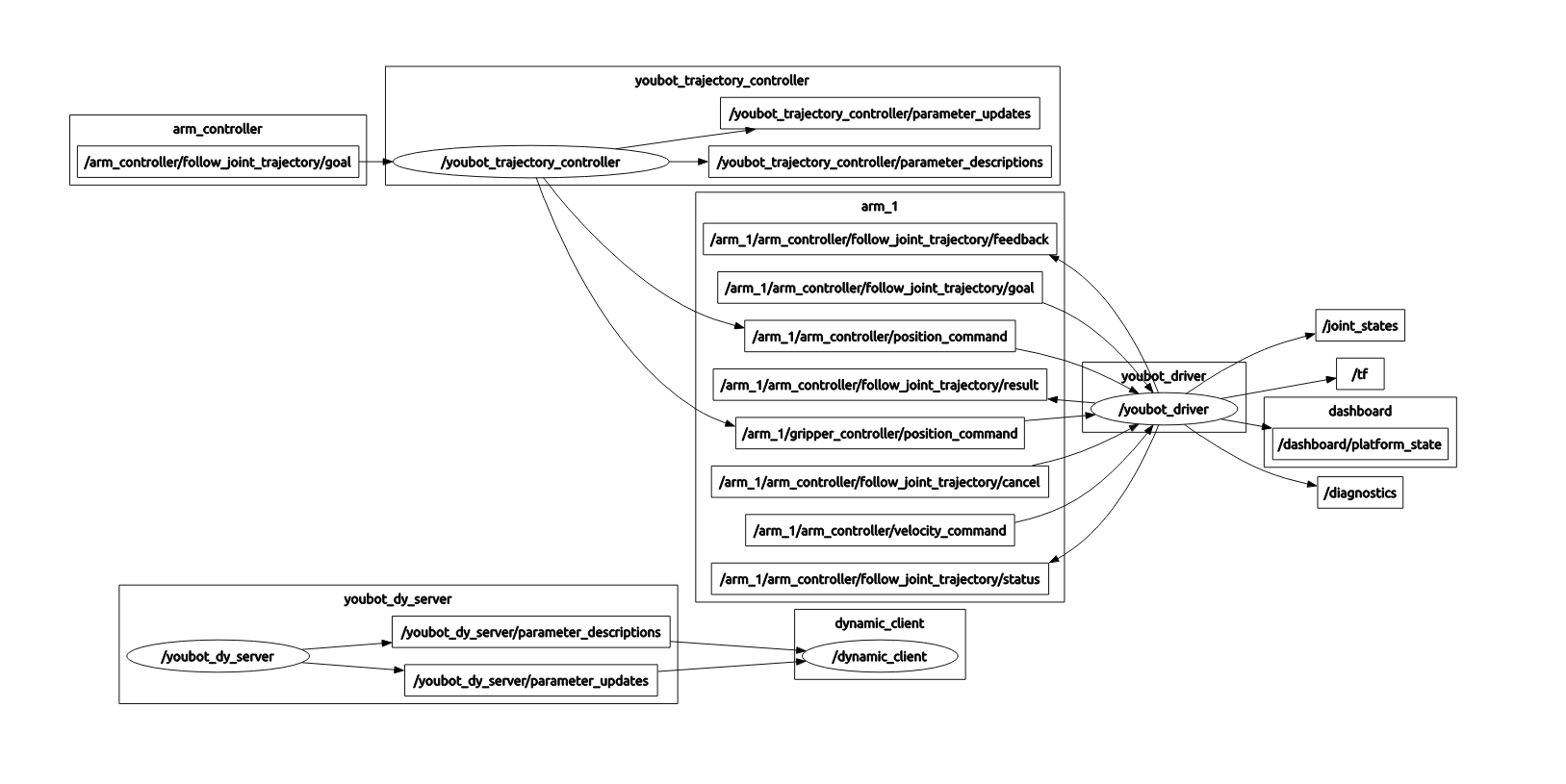
youbot_trajectory_controller多出来2个topic是由dynamic configure引入的,即dynamic server引入的。
视频地址
















 7826
7826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











