






我们通过把多维复杂的外推方程使用状态转移矩阵来表示,把输入控制使用输入控制矩阵来表示,得到了简单美观的矩阵形式的状态外推方程;
那么我们如何快速获得矩阵呢?这里我们通过从状态空间得到状态外推矩阵;
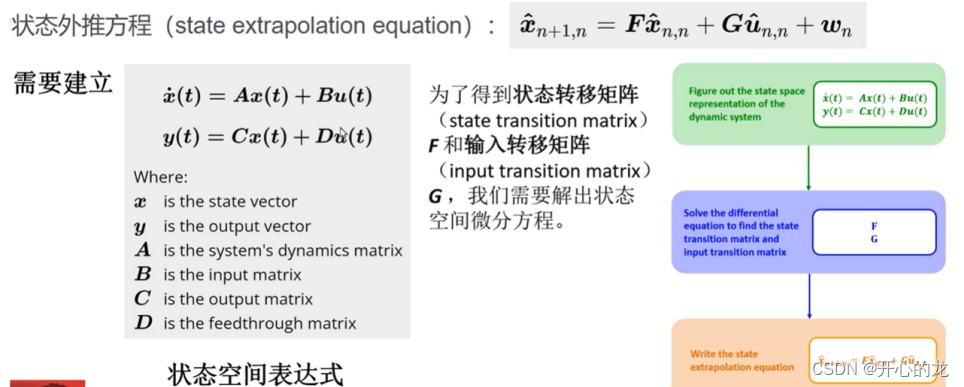
系统方程:x是状态向量,要关心哪些变量,最左边是状态变量(是状态向量的一阶导数与状态向量本身和输入有关);
A是系统的动态矩阵,是最关键的,只和系统本身有关,B是输入矩阵,得到的系统方程(控制);
Y是输出向量,一个系统有输入也有输出,中间的是系统的状态,C是输出矩阵,D是直接传输(一般是没有的,必须经过系统变化)
向量有三个:系统内部的状态向量和输入向量和输出向量;
矩阵:包括四个矩阵输入矩阵,输出
矩阵,系统矩阵和控制矩阵;
先根据系统有没有输入,选择状态变量,根据物理模型,将状态空间表达式A,B,C,D定出来;
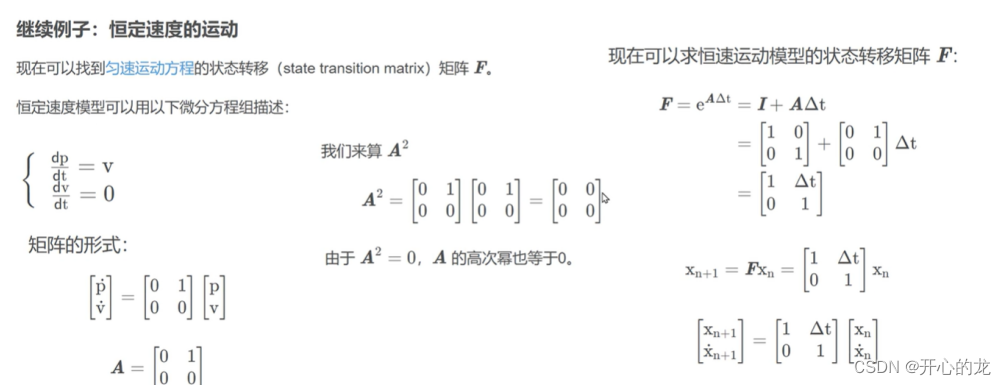
通过匀速运动的例子来举例说明:
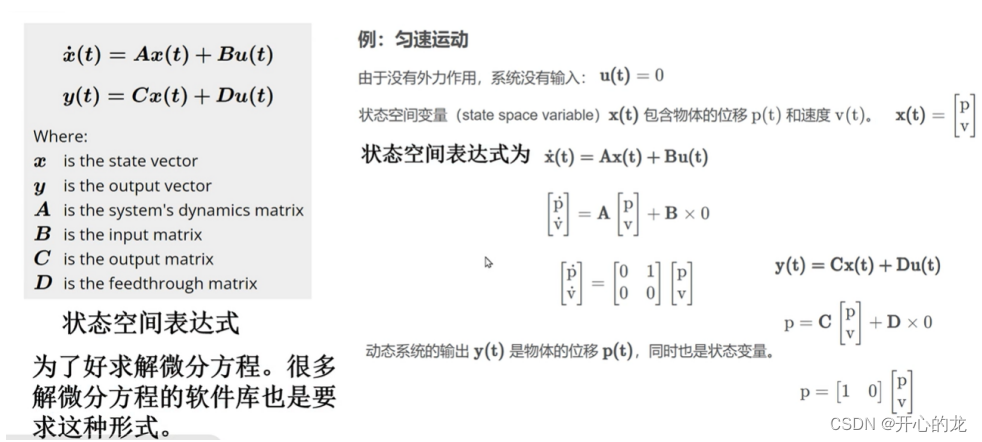
一系列的微分方程组成的,输入是一项,所以是一维的,输出是Y,导数是中间过程;
没有中间过程-类比经典控制里面的传递函数,只描述了输入和输出,没有中间过程,只含输入和输出的系统,没有办法转为外推方程;
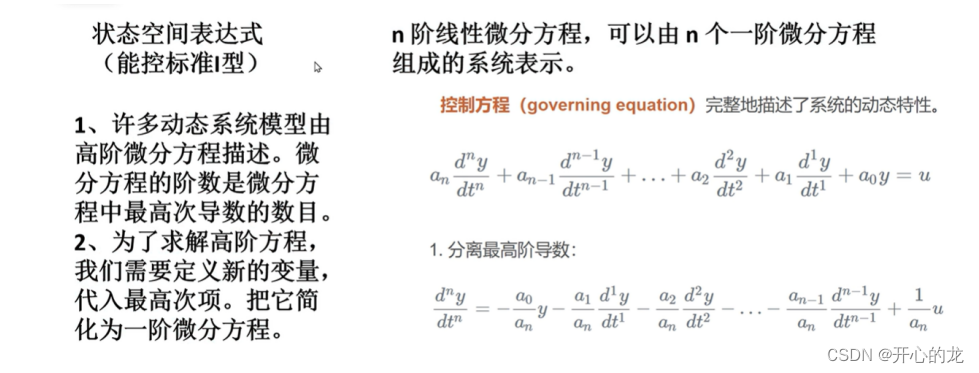
为了求解这个过程,我们需要引入新的变量,带去最高次项把他简化为一阶微分方程;
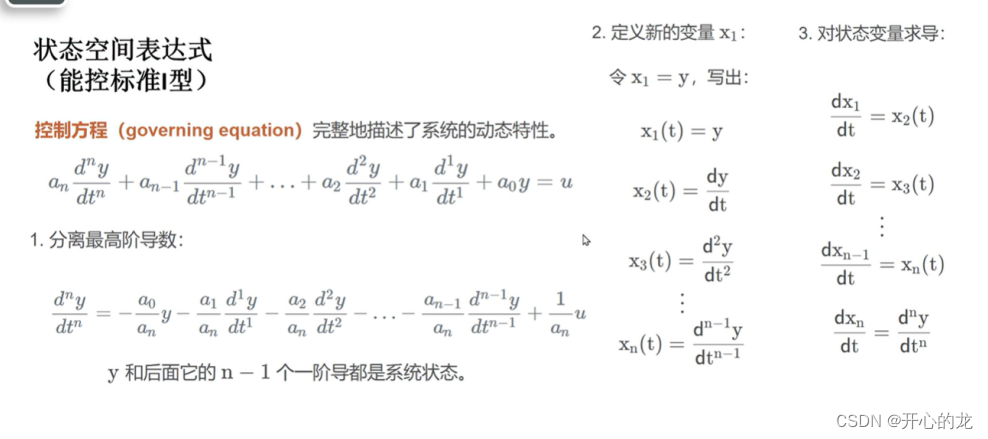
 y和后面的N-1个一阶倒数,都是状态变量,引入新的Xn去替换,然后对其求导;
y和后面的N-1个一阶倒数,都是状态变量,引入新的Xn去替换,然后对其求导;

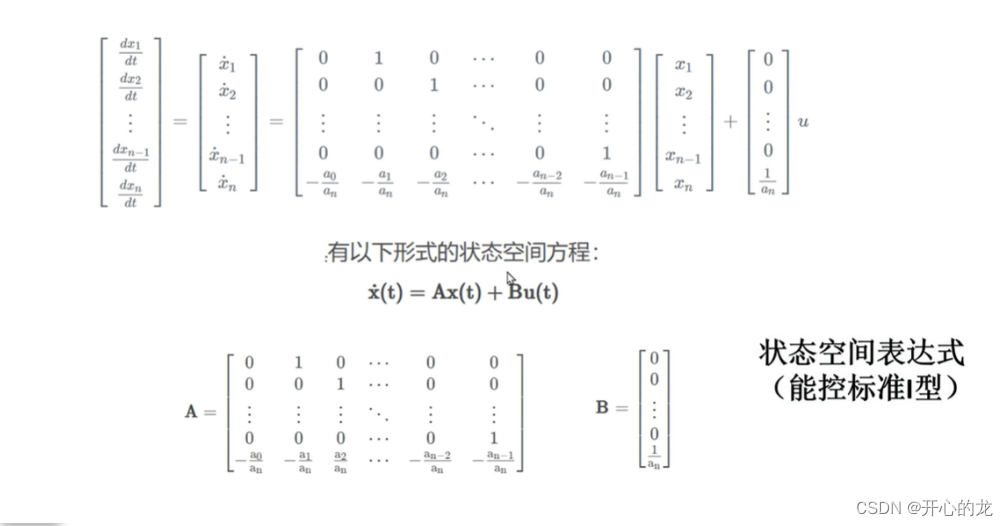
总结: 首先建立状态空间表达式,根据已知或者得到的内容,得到一个高阶微分方程,然后把他转换给状态空间表达式,把他写成动态矩阵;
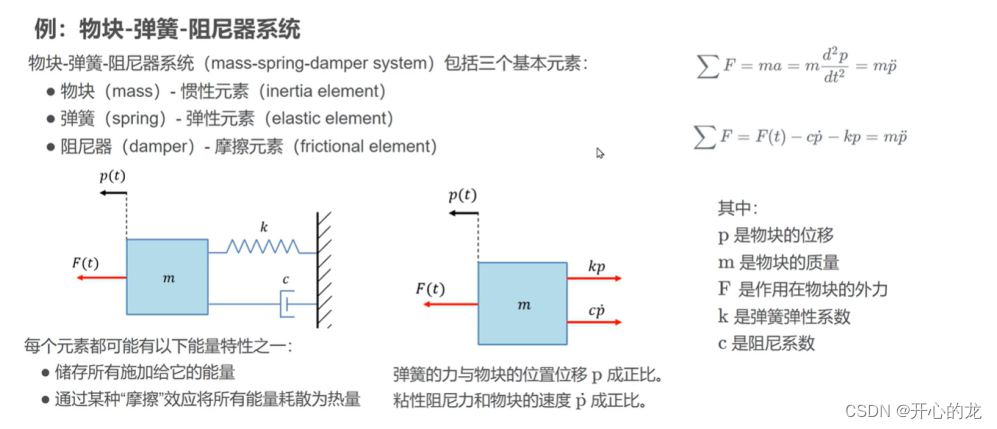
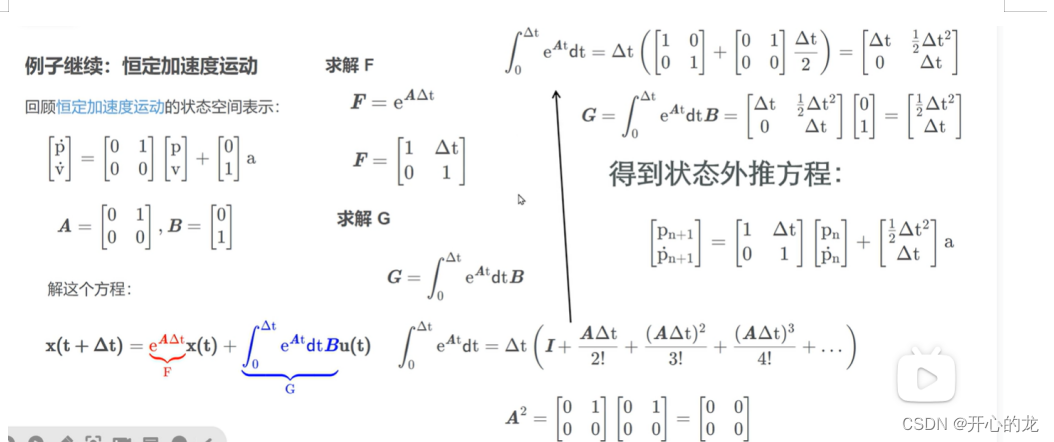
 上面的描述有点抽象,下面通过具体的例子来说明:
上面的描述有点抽象,下面通过具体的例子来说明:

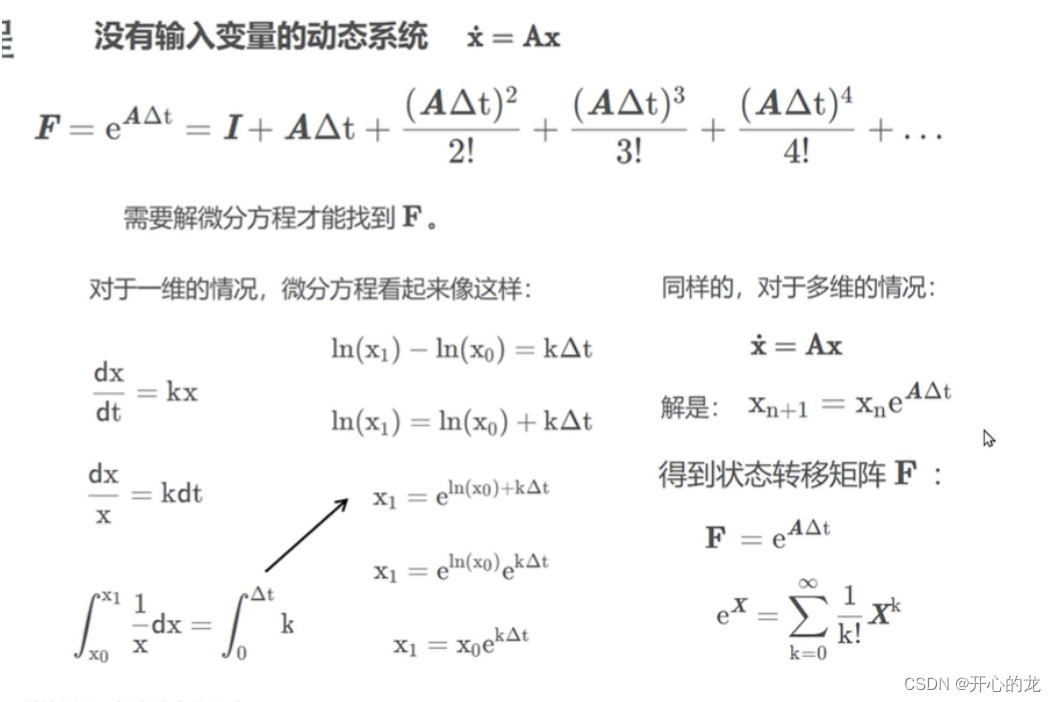
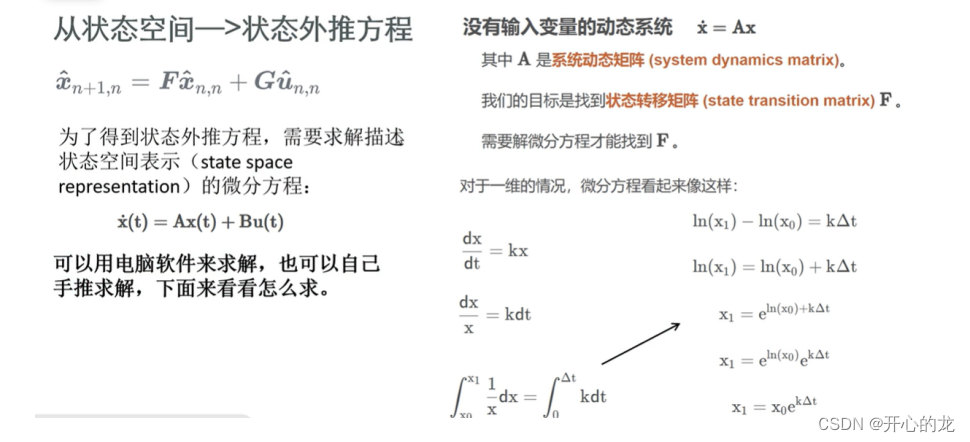
得到了状态空间表达式,如何从状态空间得到状态外推方程:
关键:就是求解微分方程:
一维情况下,就是两边积分,从一个状态积分到另一个状态,对应时间;
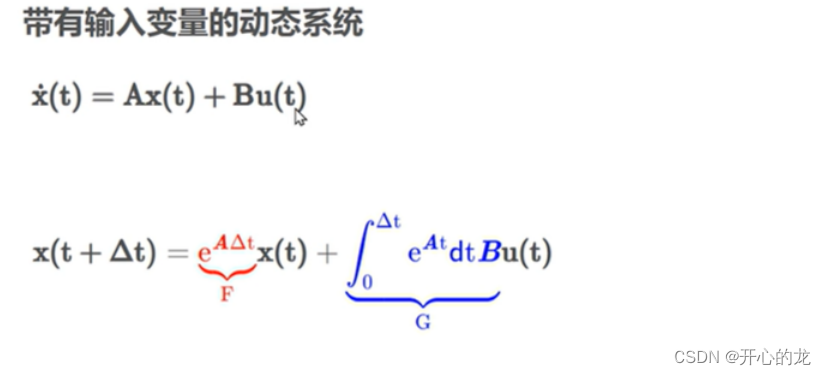
引入有输入控制的;

















 991
991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









