






本文基于 huggingface 源码,对 RLHF 的实现过程做一个比较通俗的讲解。
一、RLHF基础知识
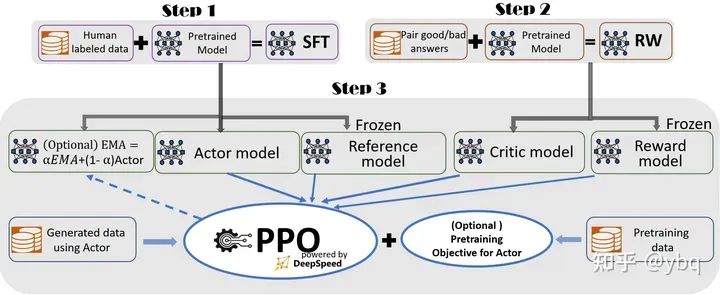
RLHF的核心就是4个模型之间的交互过程
-
Actor model:传统的语言模型,最后一层网络是 nn.Linear(hidden_size, vocab_size)
-
Reference model(不参与训练):Actor_model的一个复制
-
Reward model(不参与训练):
- 将传统语言模型的最后一层网络,由 nn.Linear(hidden_size, vocab_size) 替换成 nn.Linear(hidden_size, 1),也就是说该模型输出的是当前token的得分,而不是对下一个token的预测
- 输入是prompt + answer, 输出是answer中每个token对应的值,answer中最后一个token对应的值即为这条语料的reward
-
Critic model:Reward_model 的一个复制
二、强化学习基础知识
很多NLP出身的同学,经常会因为强化学习的基础概念模糊,导致长期对 RLHF 一知半解,这里我用几个例子来做帮助大家更好的认知。
-
大模型生成完整answer的过程,视为PPO的一次完整的交互,reward_model的打分便是这次交互的reward;
-
大模型每生成一个token,视为PPO中的一步;
-
假设一个汉字等价为一个token。
prompt:中国的首都是哪里?answer:首都是南京
-
Reward = Reward_model(‘首都是南京’),如果我们有一个较好的reward_model,这里大概率会输出一个负数,例如-10;
-
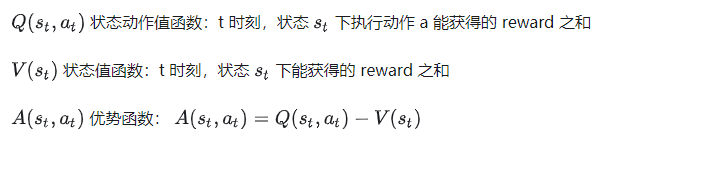
Q(2, ‘是’) = Q(‘首都’,‘是’) ,意思是在’首都’这个state下,下一步action选择’是’这个token,所能获得的reward,显然这会是一个较大的值;
-
V(4) = V(‘首都是南’),意思是在’首都是南’这个state下,能获得的reward,显然这会是一个较小的值。
上面的例子也告诉我们,语言模型的reward,只有看到结束才能确定。有时候一个token预测错误,整个句子的reward都不会很大。
三、RLHF完整流程
有了RLHF 和 RL 的基础知识后,我们来介绍每个模型的作用:
-
Reward_model 负责给 LLM 生成的句子打分
-
Actor_model 就是我们要优化的 LLM
-
Critic_model 负责计算Actor_model的状态动作值矩阵,也就是上面提到的Q函数(Reward模型只负责给最后一个token打分,给之前token打分的重任靠Critic_model 完成)
-
Reference_model 是一个标杆,为的是让我们的Actor_model在训练时不要偏离原始模型太远,保证其不会失去原本的说话能力
RLHF的第一个环节:让模型生成答案,并对其打分
-
给定 batch_size 条 prompt
-
调用actor_model生成answer,并进行token化,得到一个 B * L 的矩阵;
-
reward_model 对answer进行打分,得到一个 B * 1 的矩阵;
-
critic_model 对每个token进行打分,得到一个 B * L 的矩阵;
-
actor_model 和 reference_model 对生成的句子进行一遍正向传播,保存output.logits,得到两个 B * L * V 的矩阵
-
利用gather_log_probs() 函数,只保存目标token的logit值,得到两个 B * L 的矩阵
{
'prompts': prompts,
'input_ids': seq,
"attention_mask": attention_mask
'logprobs': gather_log_probs(logits[:, :-1, :], seq[:, 1:]), # batch_size * (seq_len - 1)
'ref_logprobs': gather_log_probs(logits_ref[:, :-1, :], seq[:,1:]), # batch_size * (seq_len - 1)
'value': values, # batch_size * seq_len
'rewards': reward_score, # torch.Size([batch_size])
}
def gather_log_probs(logits, labels):
log_probs = F.log_softmax(logits, dim=-1)
log_probs_labels = log_probs.gather(dim=-1, index=labels.unsqueeze(-1))
return log_probs_labels.squeeze(-1)
RLHF的第二个环节:修正reward
前面提到,我们不能让 actor_model 偏离 reference_model 太远,因此我们要给rewards矩阵添加一个惩罚项,compute_rewards() 函数的返回是:每个token修正后的rewards:
-
最后一个token的计算方法是 Reward_score + KL_penalty
-
前面的所有的token 的计算方法是 0 + KL_penalty (除了最后一个token,前置token的reward初始值都是0,但是要加上惩罚项)
结合代码看的时候,要始终记住这个变换:
prompts = inputs['prompts']
log_probs = inputs['logprobs']
ref_log_probs = inputs['ref_logprobs']
reward_score = inputs['rewards']
values = inputs['value']
attention_mask = inputs['attention_mask']
seq = inputs['input_ids']
start = prompts.size()[-1] - 1
action_mask = attention_mask[:, 1:]
old_values = values
old_rewards = self.compute_rewards(prompts, log_probs, ref_log_probs, reward_score, action_mask)
ends = start + action_mask[:, start:].sum(1) + 1
# 计算reward
def compute_rewards(self, prompts, log_probs, ref_log_probs, reward_score, action_mask):
kl_divergence_estimate = -self.kl_ctl * (log_probs - ref_log_probs)
rewards = kl_divergence_estimate
start = prompts.shape[1] - 1
ends = start + action_mask[:, start:].sum(1) + 1
reward_clip = torch.clamp(reward_score, -self.clip_reward_value, self.clip_reward_value)
batch_size = log_probs.shape[0]
for j in range(batch_size):
rewards[j, start:ends[j]][-1] += reward_clip[j]
return rewards
RLHF的第三个环节:计算优势函数和Q函数
我们再看一下这个公式:
优势函数(Advantage Function)在强化学习中是一个非常关键的概念,通常用于评估在特定状态下采取某个动作比遵循当前策略(Policy)更好或更差的程度。优势函数的主要用途是优化策略,帮助模型明确地了解哪些动作(哪个Token)在当前状态(已生成的token)下是有利的。
get_advantages_and_returns() 函数根据第二个环节修正后的 rewards 和 values 计算优势函数,有两个返回值:
- advantages矩阵
- returns矩阵,等价于 advantages + values,也就是Q函数

PPO论文中Advantage函数的计算公式
batch = {'input_ids': seq, "attention_mask": attention_mask}
advantages, returns = self.get_advantages_and_returns(old_values, old_rewards, start)
## 优势函数的返回
def get_advantages_and_returns(self, values, rewards, start):
# Adopted from https://github.com/CarperAI/trlx/blob/main/trlx/models/modeling_ppo.py#L134
lastgaelam = 0
advantages_reversed = []
length = rewards.size()[-1]
for t in reversed(range(start, length)):
nextvalues = values[:, t + 1] if t < length - 1 else 0.0
delta = rewards[:, t] + self.gamma * nextvalues - values[:, t]
lastgaelam = delta + self.gamma * self.lam * lastgaelam
advantages_reversed.append(lastgaelam)
advantages = torch.stack(advantages_reversed[::-1], dim=1)
returns = advantages + values[:, start:]
return advantages.detach(), returns
RLHF的第四个环节:更新Actor模型
利用最新的actor模型,重新估算一遍语言模型目标token的logits,然后利用advantages矩阵进行loss计算:
-
输入是新的actor模型的语言模型logits,旧的actor模型的语言模型logits,advantages矩阵
-
在clip_loss,和原始loss之间,选择一个最小的loss进行返回
重要性采样
PPO论文中Actor模型loss

注意上文的一句话,“利用最新的actor模型”,这里涉及到一个重要的概念:重要性采样!
简单来说,我们的 Actor_model 只要训了一条语料,就会变成一个新的模型,那也就是说:我们在第一个环节所构造的语料都无法使用了,因为现在的 actor_model 已经无法生成出之前的answer。
重要性采样的变换公式:
因此,我们是在用另外一个模型的模拟轨迹,来优化我们当前的模型。利用上述公式,我们可以完整这样的近似转化操作,这就是重要性采样的简单理解。
这里不懂也无所谓,就当是引入了一个新的系数来修正 reward 即可。log_ratio = (logprobs - old_logprobs) * mask 这一行代码对应着重要性采样的修正实现。
batch = {'input_ids': seq, "attention_mask": attention_mask}
actor_prob = self.actor_model(**batch, use_cache=False).logits
actor_log_prob = gather_log_probs(actor_prob[:, :-1, :], seq[:, 1:])
actor_loss = self.actor_loss_fn(actor_log_prob[:, start:], log_probs[:, start:], advantages, action_mask[:, start:])
self.actor_model.backward(actor_loss)
self.actor_model.step()
## loss的计算
def actor_loss_fn(self, logprobs, old_logprobs, advantages, mask):
## policy gradient loss
log_ratio = (logprobs - old_logprobs) * mask
ratio = torch.exp(log_ratio)
pg_loss1 = -advantages * ratio
pg_loss2 = -advantages * torch.clamp(ratio, 1.0 - self.cliprange, 1.0 + self.cliprange)
pg_loss = torch.sum(torch.max(pg_loss1, pg_loss2) * mask) / mask.sum()
return pg_loss
RLHF的第五个环节:更新Critic模型
同理,利用最新的critic模型,重新估算一遍Q矩阵,然后利用returns矩阵(其实就是真实的Q矩阵)进行loss计算:
- 输入是新的critic模型计算的Q矩阵,旧的critic模型计算的Q矩阵,returns矩阵
- 在clip_loss,和原始loss之间,选择一个最小的loss进行返回
value = self.critic_model.forward_value(**batch, return_value_only=True, use_cache=False)[:, :-1]
critic_loss = self.critic_loss_fn(value[:, start:], old_values[:,start:], returns, action_mask[:, start:])
self.critic_model.backward(critic_loss)
self.critic_model.step()
## loss的计算
def critic_loss_fn(self, values, old_values, returns, mask):
values_clipped = torch.clamp(values, old_values - self.cliprange_value, old_values + self.cliprange_value)
if self.compute_fp32_loss:
values = values.float()
values_clipped = values_clipped.float()
vf_loss1 = (values - returns)**2
vf_loss2 = (values_clipped - returns)**2
vf_loss = 0.5 * torch.sum(torch.max(vf_loss1, vf_loss2) * mask) / mask.sum()
return vf_loss
最后分享
AI大模型作为人工智能领域的重要技术突破,正成为推动各行各业创新和转型的关键力量。抓住AI大模型的风口,掌握AI大模型的知识和技能将变得越来越重要。
学习AI大模型是一个系统的过程,需要从基础开始,逐步深入到更高级的技术。
这里给大家精心整理了一份全面的AI大模型学习资源,包括:AI大模型全套学习路线图(从入门到实战)、精品AI大模型学习书籍手册、视频教程、实战学习、面试题等,资料免费分享!
AI大模型学习路线
如果你对AI大模型入门感兴趣,那么你需要的话可以点击这里大模型重磅福利:入门进阶全套104G学习资源包免费分享!
扫描下方csdn官方合作二维码获取哦!

这是一份大模型从零基础到进阶的学习路线大纲全览,小伙伴们记得点个收藏!

第一阶段: 从大模型系统设计入手,讲解大模型的主要方法;
第二阶段: 在通过大模型提示词工程从Prompts角度入手更好发挥模型的作用;
第三阶段: 大模型平台应用开发借助阿里云PAI平台构建电商领域虚拟试衣系统;
第四阶段: 大模型知识库应用开发以LangChain框架为例,构建物流行业咨询智能问答系统;
第五阶段: 大模型微调开发借助以大健康、新零售、新媒体领域构建适合当前领域大模型;
第六阶段: 以SD多模态大模型为主,搭建了文生图小程序案例;
第七阶段: 以大模型平台应用与开发为主,通过星火大模型,文心大模型等成熟大模型构建大模型行业应用。
100套AI大模型商业化落地方案

大模型全套视频教程

200本大模型PDF书籍

👉学会后的收获:👈
• 基于大模型全栈工程实现(前端、后端、产品经理、设计、数据分析等),通过这门课可获得不同能力;
• 能够利用大模型解决相关实际项目需求: 大数据时代,越来越多的企业和机构需要处理海量数据,利用大模型技术可以更好地处理这些数据,提高数据分析和决策的准确性。因此,掌握大模型应用开发技能,可以让程序员更好地应对实际项目需求;
• 基于大模型和企业数据AI应用开发,实现大模型理论、掌握GPU算力、硬件、LangChain开发框架和项目实战技能, 学会Fine-tuning垂直训练大模型(数据准备、数据蒸馏、大模型部署)一站式掌握;
• 能够完成时下热门大模型垂直领域模型训练能力,提高程序员的编码能力: 大模型应用开发需要掌握机器学习算法、深度学习框架等技术,这些技术的掌握可以提高程序员的编码能力和分析能力,让程序员更加熟练地编写高质量的代码。
LLM面试题合集

大模型产品经理资源合集

大模型项目实战合集

👉获取方式:
😝有需要的小伙伴,可以保存图片到wx扫描二v码免费领取【保证100%免费】🆓


















 712
712

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









