







研究内容
本次设计主要的研究内容是实现门式起重机安全监控系统的硬件部分设计。整个门式起重机安全监控系统可实现对于被吊物体重量的测量、显示和重量超重报警。具体来说,该系统以采用单片机为总控制中心,首先经由采集数据电路对被吊物体称重,数据处理经单片机主控电路完成、然后通过人机交互电路的矩阵键盘实现数据的输入以及数码管显示电路进行称量信息显示。如若被吊物体超过提前预设的总重量,门式起重机的操作人员听到蜂鸣器发出的蜂鸣声就知道需要减轻被吊物体重量,以防止意外情况的发生。
研究意义
在码头、港口以及船舶等生产制造装备过程中,近些年来起重机使用越加频繁。然而较高的风险因素也隐藏在其运行状态中,安全事故偶有发生,对于人员安全及经济益损抱有很大风险。由此,管理者最为关注的问题之一则是起重设备在运行中的安全问题。为从源头遏制事故的发生次数,经技术层次对起重机安全智能监控进行更新升级。要想明晰事故发生原因首先要掌握起重机操作过程情况,追根溯源,时刻监控其运行状态。对于故障问题的发生能于第一时间进行反馈与提示,对问题进行适时诊断,因此关于起重机安全监控系统的研究在实际应用层面具有重要意义。
系统总体框架
通过对设计目标分析,确定本设计系统的系统整体框架。逻辑线路为首先通过应变片式传感器进行测量,对模拟信号放大与模数转换,再进入单片机处理,最后一步则是经数码管显示模块进行显示。一旦被吊物体超过按键模块所设置的总量,整个系统就会通过启动蜂鸣器来进行报警提示,从而使得门式起重机处于一个安全的状态。整个系统由五个部分组成,分别为STC89C52控制单元、重量采集单元、按键设置单元、液晶显示单元、蜂鸣器报警单元。整体结构路径图如2-1:
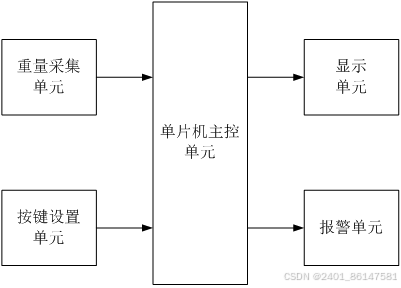
图2-1系统结构图
系统各功能模块说明:
(1)单片机主控单元:该单元用于整个系统的自动化控制,该单片机芯片具有性能可靠、性价比较高的特点,通过该芯片可实现对于整个门式其中安全监控系统的自动化控制。
(2)按键设置单元:用于对被吊物体的重量进行设置。
(3)称重采集单元。用于采集当前被吊物体的实际重量,并转换成数字电压信号输出给单片机,由单片机进行数据的后续处理。
(4)信息显示单元:用于显示被吊物体的总量信息。
(5)报警单元,用于实现超重被调物体的报警
主要元器件选型论证
主控芯片选型论证
关于本设计的要求是必须采用主控制器选用单片机的系统设计,一方面易于使计算机与测量控制两者的技术相结合;另一方面则是便于更新迭代,通过变换软件的程序就可以形成升级化地“智能化测量控制系统”。
系统没有进一步设置更高层次的规范,同时通过思索,在本设计中程序模块占比较大。因此,以总体方案设计分析为主旨,选用带EPROM 的单片机设计一个相对简易的系统。该应用程序可不需存储在外部扩展器上,因其程序不大,可直接存储在片内,同时也达到简化电路的目的。
(5)报警单元:用于实现对于被吊超重物体的报警提示。
虽然INTEL公司的8051和8751都适用,本设计还是选用ATMENL出产的AT89SXX系列单片机。AT89SXX 系列与MCS-51 相比较,AT89SXX有其特有优势:首先,程序的写入更为便捷,因其片内存储器使用闪速存储器;其次,芯片尺寸更小,这将引致硬件电路的体积更小。另外,MCPU是8K×8ROM、256×8RAM、2 个16 位的定时计数器及4 个的8 位I/O 接口。其不仅具有相对较低的价格,还有稳定的性能,该些装置在一定程度上能够较好的达到本仪器的测量和控制要求。最终这些,我们选择了日常使用的单片机AT89S52来达到系统设计的功能要求。AT89S52具有的8KB 程序存储器对于实现我们的需要是可行的。
主控电路设计
ST89C51由12大模块组成,该些组成模块主要经过地址与数据总线连接。P0~P3口通用的是四个输入输出引脚,一个特殊功能寄存器(内存存储了中断、串口、定时器等特殊功能单元的操作地址)。在STC89C52中,不仅包括2个定时和计时器,还可以经由编程操纵达到能够进行8位或16位的计数功能。串口用实现于系统外模块的数据通信,遵循RS232通信协议[7]。B寄存器用于完成乘除法计算,配合运算器件使用。具体引脚见下图3-1所示:
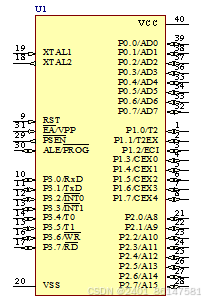
图3-1 STC89C51单片机内部结构图
在上图中,其中,VCC:供电电压。
GND:接地。
P0口:八位双向I/O口,P0口能用于外部程序数据存储器,可被定义为数据/地址的第八位。
P1口:P1口是八位双向I/O口,有上拉电阻,P1口管脚写入“1”后,被内部上拉为高电平,可用作输入。当它被外部下拉为低电平时,将输出电流。
P3口:P3口为双向I/O口,特性是8个带内部上拉电阻,当它写入“1”时,内部上拉为高电平,用作输入。输入时,因外部下拉为低电平,P3口将会输出电流。同时,其还可作为具有某些特别作用的端口。
RST:复位输出。当振荡器复位部件之后后,该脚需要保持两个机器周期的高电平。
XTAL1:反向振荡放大器的输入端,以及内部工作时钟电路的输入端。
XTAL2:反向振荡器的输出。
单片机的最小系统由四部分组成,分别是系统供电电源、晶振电路、复位电路和单片机。下面对组成最小系统的的各部分电路功能进行说明:
最小系统的工作电源在4.5~5.5V的直流电压范围内工作,本设计选择工作电压为直流5V,原理图设计中用VCC进行表示。
Y1(无源晶振)和两个电容贴片组成晶振电路,晶振电路中的两个30PF负载电容,一端接单片机的(18和19引脚)另一端接地。它直接决定晶振的谐振频率和输出幅度。要想产生时钟频率以供单片机工作,需要将晶振电路与单片机内部电路相结合。晶振电路提供能够实行全部指令的单片机需要的频率。
Rst电阻(1K)和C6(16V10uf)电容组成了复位电路。其功用是在系统接电的一刹那,在单片机的RST引脚上(9脚),添上一个或两个以上机器周期的高电平信号,让系统变成复位状态。单片机正常运行程序的前提条件是复位操作完成后。
单片机最小系统电路见3-2图所示:
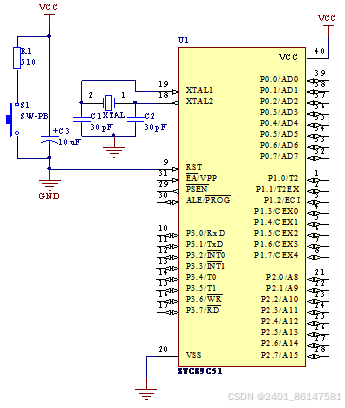
图3-2 STC89C51单片机最小系统
总结与展望
在毕业设计期间,本人通过广泛阅读有关门式起重机安全监控系统的文献资料,在理解的基础上,对门式起重机安全监控系统进行现状研究分析。经由对比研究传统与同方案的优势与劣势,最后决定通过ST89C52单片机完成门式起重机安全监控系统。逻辑线路总结如下:
1、完成液晶电路,实现被吊物体重量的显示。
2、完成按键电路,实现了被吊物体重量设置的限制等操作。
3、完成传感器电路,实现了对于被吊物体的重量称量,同时将称量的信息,传送给核心控制单元。
4、对于超出预设重量的物体能够力通过蜂鸣器进行报警。
由于受到个人的知识面和当前本实验条件的限制,尽管本次设计已经完成,但仍然存在以下几个面不足有待改善:
1、有关问题的干扰:对于干扰提前有一定的预防,如在设计中对按键与传感器数据搜集进行一定的过滤删除工作,但按键稳定和数据准确的效果不一定一直存在,因此完成的成效尚不显著。
2、显示过程中会出现抖屏和数据刷新慢的现象,这个问题还需要对软件设计进行进一步优化,使系统更具实时性。
尽管这些都是有待解决的问题。本人将会在今后的工作中不断的努力,对设计方案和软硬件设计进行优化,使系统更加完善。

















 1211
1211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









