







SLAM(Simultaneous Localization and Mapping)
同时估计机器人位姿与环境地图
1, 核心概念
- Localization(定位):在已知地图上估计机器人当前位姿
- Mapping(建图):在已知机器人位姿下构建环境地图
- SLAM:同时进行定位与建图
-
主要任务
- 定位问题:估计 x t x_t xt
- 地图构建:生成环境地图,用于路径规划
-
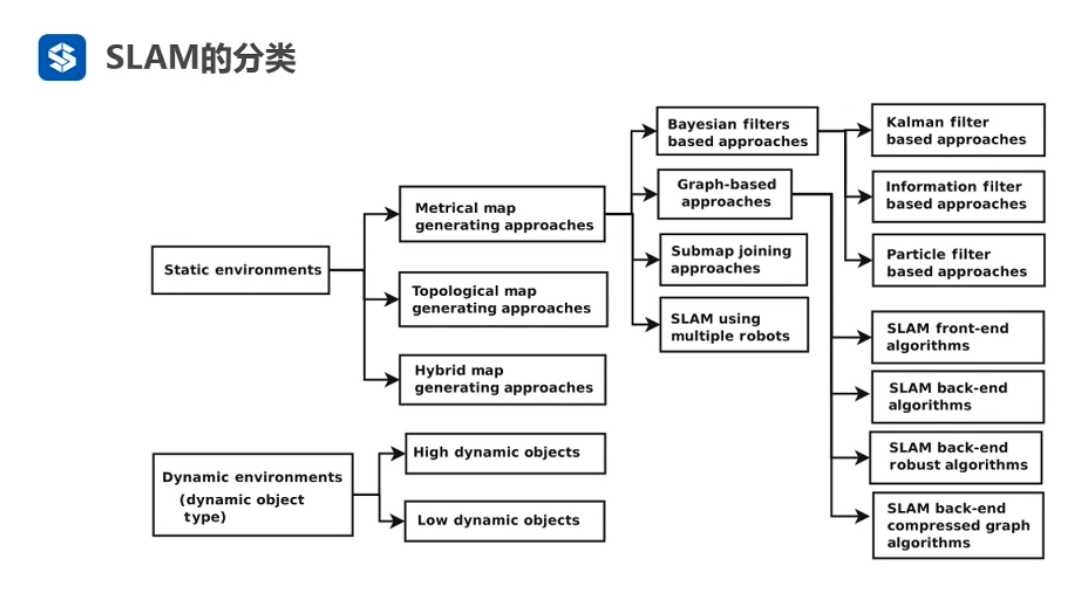
地图分类
-
静态地图
-
尺度地图(Metric Map)
- 格式化表示(如占据栅格、点云)
- 精度高、便于导航与规划
-
拓扑地图(Topological Map)
- 特征点/关键帧作为节点,节点间连边表示可达性
- 结构紧凑,适合大规模环境
-
混合地图(Hybrid Map)
- 在拓扑节点上附加局部尺度地图
- 兼顾全局性与局部精度
-
-
动态环境(扩展主题,不在此讨论)
- 高动态目标:人员、车辆等运动速度较快的物体
- 低动态目标:缓慢移动或短暂静止的物体
-
-
经典方法
- 滤波器方法(Filter-based SLAM)
- 如 EKF-SLAM、FastSLAM
- 在线估计当前状态,适合小规模环境
- 图优化方法(Graph-based SLAM)
- 基于 Pose Graph,使用非线性最小二乘
- 适合大规模场景及全局一致性优化
图优化(Graph-based SLAM)
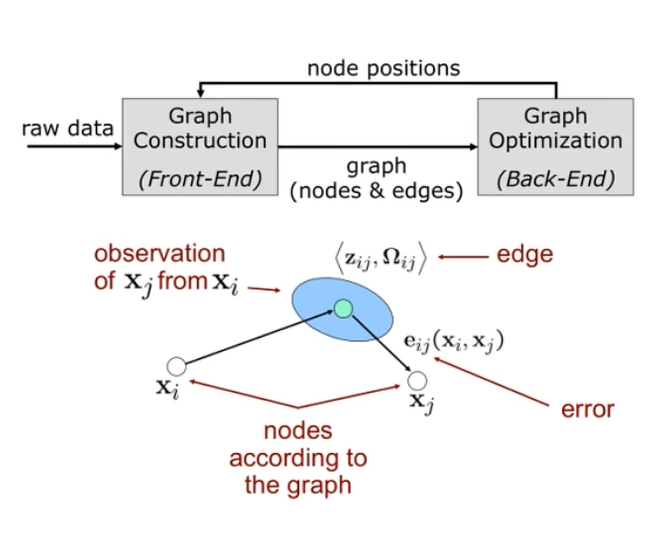
1. Graph‐based SLAM 总览
-
目标概率
p ( x 0 : t , m ∣ z 1 : t , u 1 : t ) p(x_{0:t}, m \mid z_{1:t}, u_{1:t}) p(x0:t,m∣z1:t,u1:t)
从控制输入 u 1 : t u_{1:t} u1:t 与观测 z 1 : t z_{1:t} z1:t 推估机器人全轨迹 x 0 : t x_{0:t} x0:t 及地图 m m m。 -
两大阶段
- 前端(Graph Construction):构建图结构(节点、边)
- 后端(Graph Optimization):非线性最小二乘优化所有节点位姿
2. 图的基本要素
- Graph:SLAM 问题的整体结构
- Node:机器人的一时刻位姿 x i x_i xi
- Edge:节点间的空间约束(相对变换观测)
3. 关键公式
-
相对位姿
T i j = T j T i − 1 T_{ij} = T_j \;T_i^{-1} Tij=TjTi−1- T i T_i Ti:从世界坐标系到时刻 i i i 坐标系的变换
- T j T_j Tj:从世界坐标系到时刻 j j j 坐标系的变换
- T i j T_{ij} Tij:从 x i x_i xi 到 x j x_j xj 的相对位姿
-
误差项(单条边)
e i j ( x i , x j ) = log ( z i j − 1 ( T i − 1 T j ) ) ∈ R 6 e_{ij}(x_i,x_j) = \log\!\bigl(z_{ij}^{-1}\,(T_i^{-1}T_j)\bigr) \;\in\;\mathbb{R}^6 eij(xi,xj)=log(zij−1(Ti−1Tj))∈R6- z i j z_{ij} zij:传感器观测的 i → j i\to j i→j 变换
- T i − 1 T j T_i^{-1}T_j Ti−1Tj:节点估计的 i → j i\to j i→j 变换
- Log:SE(3)→se(3) 对数映射,6 维向量(3 平移+3 旋转)
4. 链式变换 T 1 T_1 T1 与回环观测 T 2 T_2 T2
| 变换 | 定义 | 表达式 |
|---|---|---|
| T 1 T_1 T1 | 链式累积:里程计/帧间匹配依次乘积 | T 1 = T 1 → 2 T 2 → 3 T 3 → 4 T_1 = T_{1\to2}\,T_{2\to3}\,T_{3\to4} T1=T1→2T2→3T3→4 |
| T 2 T_2 T2 | 回环观测:直接从 x 1 x_1 x1 与 x 4 x_4 x4 的重叠特征/ICP 算法 | T 2 = [ R 2 t 2 0 1 ] T_2 = \begin{bmatrix}R_2 & t_2\\0&1\end{bmatrix} T2=[R20t21] |
- 同质矩阵结构
T = [ R t 0 1 × 3 1 ] , R ∈ R 3 × 3 , t ∈ R 3 T = \begin{bmatrix}R & t\\[3pt]0_{1\times3}&1\end{bmatrix}, \quad R\in\mathbb{R}^{3\times3},\; t\in\mathbb{R}^3 T=[R01×3t1],R∈R3×3,t∈R3
5. 回环误差与优化
-
残差矩阵
Δ T = T 1 − 1 T 2 \Delta T = T_1^{-1}\,T_2 ΔT=T1−1T2
若 Δ T = I \Delta T=I ΔT=I 则两种变换完全一致;否则存在位姿偏差。 -
残差向量
e = log ( Δ T ) ( ∈ R 6 ) e = \log(\Delta T)\quad(\in\mathbb{R}^6) e=log(ΔT)(∈R6) -
优化目标
min x 0 : t ∑ ( i , j ) ∥ e i j ( x i , x j ) ∥ 2 \min_{x_{0:t}}\;\sum_{(i,j)}\|\,e_{ij}(x_i,x_j)\|^2 x0:tmin(i,j)∑∥eij(xi,xj)∥2
通过非线性最小二乘校正全局漂移,融合里程计与回环约束。
前瞻:在 ROS2 中,可借助
nav2_amcl/slam_toolbox等包前端生成回环边,后端调用g2o或Ceres完成全局优化。
滤波器(Filter-based SLAM)
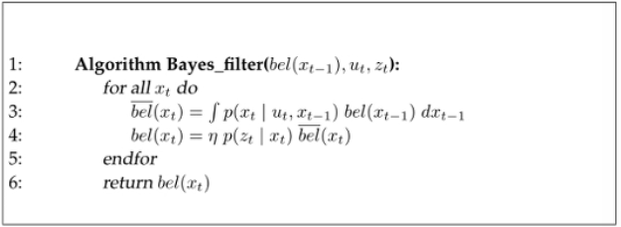
1. 目标
仅估计当前位姿
x
t
x_t
xt 并构建地图
m
m
m
p
(
x
t
,
m
∣
z
1
:
t
,
u
1
:
t
)
p(x_{t}, m \mid z_{1:t}, u_{1:t})
p(xt,m∣z1:t,u1:t)
– 适合小范围场景,易受里程计漂移影响
2. 基本要素
- 状态向量 x t x_t xt:当前位姿 [ x , y , θ ] [x, y, \theta] [x,y,θ]
- 地图 m m m:特征点集合或栅格地图
- 控制输入 u t u_t ut:里程计/速度指令
- 观测 z t z_t zt:激光/视觉测量
- 过程噪声 w t ∼ N ( 0 , Q t ) w_t\sim\mathcal{N}(0,Q_t) wt∼N(0,Qt)
- 测量噪声 v t ∼ N ( 0 , R t ) v_t\sim\mathcal{N}(0,R_t) vt∼N(0,Rt)
3. 关键流程与公式
-
预测(Prediction)
{ x ˉ t = f ( x t − 1 , u t ) P ˉ t = F t P t − 1 F t ⊤ + Q t \begin{cases} \bar x_t = f(x_{t-1},u_t) \\[2pt] \bar P_t = F_t\,P_{t-1}\,F_t^\top + Q_t \end{cases} {xˉt=f(xt−1,ut)Pˉt=FtPt−1Ft⊤+Qt- f f f:运动模型(差动/自行车)
- F t = ∂ f ∂ x F_t = \frac{\partial f}{\partial x} Ft=∂x∂f:雅可比
-
更新(Correction)
{ K t = P ˉ t H t ⊤ ( H t P ˉ t H t ⊤ + R t ) − 1 x t = x ˉ t + K t ( z t − h ( x ˉ t ) ) P t = ( I − K t H t ) P ˉ t \begin{cases} K_t = \bar P_t\,H_t^\top\,(H_t\,\bar P_t\,H_t^\top+R_t)^{-1} \\[2pt] x_t = \bar x_t + K_t\,(z_t - h(\bar x_t)) \\[2pt] P_t = (I - K_t\,H_t)\,\bar P_t \end{cases} ⎩ ⎨ ⎧Kt=PˉtHt⊤(HtPˉtHt⊤+Rt)−1xt=xˉt+Kt(zt−h(xˉt))Pt=(I−KtHt)Pˉt- h h h:观测模型
- H t = ∂ h ∂ x H_t = \frac{\partial h}{\partial x} Ht=∂x∂h:雅可比
- K t K_t Kt:卡尔曼增益
4. 常见算法
- EKF‐SLAM
- 状态扩展为 [ x t , m 1 , m 2 , … ] [x_t, m^1, m^2, \dots] [xt,m1,m2,…],复杂度 O ( n 2 ) O(n^2) O(n2)
- FastSLAM
- 粒子滤波+每粒子独立 landmark‐EKF,复杂度 O ( M log n ) O(M\log n) O(Mlogn)
- Gmapping
优缺点对比
| 特性 | Filter‐based | Graph‐based |
|---|---|---|
| 估计对象 | 当前位姿 + 地图 | 全轨迹 + 地图 |
| 计算复杂度 | EKF O ( n 2 ) O(n^2) O(n2) | 优化边多时开销大 |
| 适用场景 | 小范围、低速 | 中大型环境、需全局一致性 |
| 回环处理 | 依赖线性化更新/重采样 | 直接添加回环边,全局优化 |
激光slam
基本要素
- 传感器
- 惯性测量单位 (IMU):角度、角速度
- 轮式里程计 (Wheel Odometry):线速度、累计里程
- 激光雷达 (Lidar):高频点云扫描
- 地图类型
- 覆盖栅格地图(Occupancy Grid Map):结构化、易识别
- 点云地图(Point Cloud Map):高精度三维表示
核心技术
-
帧间匹配算法
-
ICP(点到点):简单但对点云密度与噪声敏感
PI-ICP(点到线):利用线特征,抗噪性更强
NDT(高斯分布):将扫描/地图划分为高斯单元,多用于 3D
CSM(相关匹配):“暴力”搜索,鲁棒性高,不会陷入到局部特征值
深度学习配准:端到端网络或特征学习(如 LOAM 中的边角特征)
-
-
回环检测
-
Scan-to-Scan:已弱化,信息量少,易误匹配
Scan-to-Map:主流(Cartographer),实时与历史子图匹配
Map-to-Map:多帧聚合匹配,需高效数据结构
特征法:Bag-of-Words、Scan Context、Segmatch
分层检测:粗匹配 + 精细配准;Branch & Bound + Lazy Decision
-
-
后端优化(补充)
- Pose Graph 优化
- 节点:机器人位姿;边:相对位姿约束
- 工具:g2o、Ceres
- 稀疏化:剔除冗余边,加速收敛
- 因子图与滑动窗口
- 因子图框架:灵活添加多传感器因子
- 滑动窗口:限定优化范围,保证实时性
- Pose Graph 优化
2D激光slam
2D 激光 SLAM 框架对比
| 框架 | 配准算法 | 后端优化 | 适用场景 |
|---|---|---|---|
| Gmapping | 粒子滤波+ICP | 无 | 资源受限平台、简单室内 |
| Hector SLAM | CSM | 无 | 无里程计依赖、高动态环境 |
| Cartographer | CSM+梯度优化 | Pose Graph | 2D/3D混合、大范围室外 |
| LeGO-LOAM | 特征+ICP | 滑动窗口 | 室外地形变化、兼容多传感器 |
基本要素
- 传感器
- 惯性测量单位(IMU): 角度
- 轮式里程计(Wheel Odometry): 距离
- 2D激光雷达数据(Lidar)
- 2D激光雷达Slam的输出
- 覆盖栅格地图(Occupany Grid Map):更好识别,更多
- 机器人的轨迹 or PoseGraph
核心技术
- 帧间匹配算法
- PI-ICP (Point-to-Line ICP)
- 使用点到线距离准则,收敛速度快、抗噪声能力强
- CSM (Correlation Scan Matching)
- 基于相关性搜索,精度高但受激光分辨率限制
- 梯度优化方法
- 将配准问题建模为非线性最小二乘(如 Karto-SLAM),能够实现全局最优但对初值敏感
- State-of-the-Art
- 将 CSM 与梯度优化结合,兼顾实时性与配准精度
- 回环检测策略
- Scan-to-Map
- 当前激光帧与历史局部子图匹配,主流于 Cartographer
- Map-to-Map
- 多帧子图整体匹配,覆盖更大范围的闭环识别
- 分支定界 & 延迟决策 (Branch & Bound + Lazy Decision)
- 金字塔剪枝:多级地图加速相关性搜索
- 延迟闭环验证:在粗匹配后再提取最大一致子集,剔除误检
- 有效缓解回环误匹配,但在几何对称环境下仍存在挑战
备注:Cartographer 同时使用了 Scan-to-Map、Branch & Bound 和 Lazy Decision,在大多数室内外应用中表现优异,但在强几何对称区域仍可能出现误检。
2D 激光 SLAM 的发展历程
一、基于滤波(Filter-based)
- EKF-SLAM(1990s)
- 最早的特征点图(feature-based)滤波方法;导航多结合网格地图(grid-based)使用
- FastSLAM(2002–2003)
- 引入粒子滤波与独立 landmark-EKF,真正开启高效 SLAM 时代
- GMapping(2007)
- 基于粒子滤波的栅格 SLAM;加入重要性采样改善 proposal 分布
- 局限:对所有粒子一视同仁的里程计传播易受延迟与噪声影响,缺乏后端全局优化
- Optimal RBPF(2010)
- MRPT 库实现;每步多次传播选最优,提高精度
- 后续少有重大进展
二、基于图优化(Graph-based)
- Globally Consistent Range Scan(1997)
- 首个全局一致性范围扫描建图;采用非线性最小二乘但未利用稀疏性优势
- Incremental Mapping of Large Cyclic Environments(1999)
- 开创跨大规模闭环环境的增量式图优化;具备 map-to-map 约束但忽略稀疏矩阵优化
- Karto SLAM(2010)
- 基于 SPA(Sparse Pose Adjustment),改进稀疏优化框架,仍有性能瓶颈
- Cartographer(2016)
- 实时构建局部子图,结合 Scan-to-Map、回环检测与全局稀疏优化,性能与精度显著提升
小结:Filter-based 方法奠定了 SLAM 基础,Graph-based 技术依托稀疏优化与回环约束,实现了大规模、实时且高精度的 2D 激光 SLAM。
2D 激光SLAM的应用
-
数据预处理(至关重要)
- 轮式里程计标定
- 离线标定:标定轮径、轮距等几何参数,为算法提供准确的初始运动模型
- 在线标定:在实际运行中实时校正轮径偏差,补偿地面材质、载重变化带来的误差
- 激光雷达运动畸变校正
- 考虑激光扫描的时间戳与机器人运动的叠加效应
- 基于里程计/IMU 数据对白点云做插值补偿,消除因平台旋转或平移导致的畸变
- 多传感器时间同步
- 统一里程计(ODOM)、MCU 与主机(PC/NPC)采集的时钟
- 消除从电机驱动到控制单元,再到上位机打时戳过程中产生的延迟
- 尤其在快速旋转时,同步误差会显著影响地图构建与位姿估计
这样,才能确保后续配准、回环检测和全局优化都建立在可靠的输入数据之上。
- 轮式里程计标定
-
实际环境中的问题
- 动态物体
- 环境变化
- 几何结构相似环境
- 建图操作复杂 (最复杂的问题)
- 全局定位(对 2D 来说难,需 MHT 多假设跟踪)
- 地面材质的变化(里程计标定于硬地面,换路面误差增大)
- 地面凹凸不平(里程计漂移)
- 机器人载重的改变
2D 激光SLAM的趋势 —— 与视觉融合
- 视觉信息优势
- 高精度视觉里程计 (VO/VIO/VWO)
- 补偿轮式里程计在地面材质、路面凹凸及载重变化下的漂移
- 丰富的视觉特征
- 构建稠密、语义化地图,提升回环检测和全局定位的鲁棒性
-
视觉–激光融合带来的关键改进
-
动态场景与环境变化
- 视觉特征可区分移动/静态对象,减少伪回环
-
几何相似环境下的误检
- 纹理信息补充几何数据,降低误匹配
-
全局定位与闭环检测
- 视觉回环与激光回环互为验证,增强全局一致性
-
里程计误差补偿
- 视觉增量位姿修正轮式里程计误差,提高地图精度
-
-
注意事项
- 视觉在无纹理(如白墙)环境中性能下降,可结合深度或语义信息缓解
- 融合设计需平衡计算量与精度,否则易出现“1+1<2”的效果
3D激光SLAM
基本要素
- 3D 激光SLAM的输入
- imu数据
- 里程计数据
- 3D激光雷达数据(稠密图)
- 3D 激光SLAM的输出
- 3D点云地图(如高分用点云地图来做路径规划)
- 机器人轨迹 or PoseGraph
核心技术
-
3D激光SLAM的帧间匹配方法
-
Point-to-Plane ICP
-
NDT
-
Feature-based Method(在点云上提取特侦点,3d特征的匹配方法和视觉有点相似了)(LOAM(Line Point和Planar Point))
-
-
3D激光SLAM的回环检测方法(和2d没有什么区别)
-
Scan-to-Scan
-
Scan-to-Map
-
Branch and Bound & Lazy Decision
-
3D激光Slam的发展
- LOAM (Lidar Odometry and Mapping)
- 纯激光方案
- 假设设备在一定的 Sweep 区间内以匀速运动,且没有回环检测
- Sweep 假设:在其论文中,Sweep 时间为 1 秒,但在实际中可能存在不合理之处
- 该方法在实验中表现不错,广泛应用于激光 SLAM 任务中
- V-LOAM (Visual-Lidar Odometry and Mapping)
- 视觉与激光融合
- 仍然假设匀速运动,但与 LOAM 的区别在于:利用视觉(VO)作为里程计提供初始解
- Sweep 假设:误差偏移被假设为线性(与 LOAM 的不同之处在于对偏移的处理方式)
- 视觉提供更高频的运动估计(60 Hz),高于激光雷达的频率,有助于提供更精确的初始估计
- VELO (Visual-Lidar Odometry)
- 视觉与激光融合
- 不再假设匀速运动,去除了运动畸变假设
- 引入了回环检测,进一步提高系统的精度和鲁棒性,适用于更复杂的环境
这些方法逐渐演变,从最初的激光里程计到视觉-激光融合,再到去除运动畸变和加入回环检测,使得 3D 激光 SLAM 能够在更复杂的动态环境下稳定运行,并且能够处理大范围的场景。
3D激光Slam的应用
-
数据预处理(至关重要)
-
轮式里程计标定
-
激光雷达运动畸变校正
-
多传感器时间同步
-
-
与视觉融合
- 3D激光雷达为视觉提供深度信息(因为3d信息量很大(在V-LOAM论文中有提及))
- 视觉辅助激光雷达进行运动畸变去除(因为3d相比于2d来说,其运动畸变是极其严重的(因为运用于室外无人车等高速场景)),对位姿估计非常有用。
- 视觉辅助回环检测
- 视觉提供精确里程信息
激光SLAM中的问题(更多在2D上)
- 退化环境 (Degeneration Environment)
- 问题描述:例如狭窄走廊或封闭空间,通常在 SLAM 中表现为局部地图不稳定,缺乏足够的特征来进行有效的定位和建图
- 影响:由于环境的几何结构单一,激光雷达无法获取多样的参考信息,导致定位精度下降
- 常见场景:长走廊、简单房间、直线结构明显的环境
- 地图的动态更新 (Map Update)
- 问题描述:环境变化导致地图需要实时更新,如移动物体的加入或场景结构的改变
- 解决方案:如 DPG(Dynamic Programming Graph)等方法,尽管能实现动态更新,但在实际应用中,处理起来较为复杂且不够高效
- 挑战:需要平衡地图更新速度与精度,确保系统在动态环境中不会因数据延迟或误差积累而失效
- 全局定位 (Global Localization)
- 问题描述:在没有已知地图或仅部分地图信息时,激光 SLAM 在进行全局定位时容易出现失效或误差积累
- 挑战:尤其在 2D 场景下,激光 SLAM 对初始位姿的依赖较强,容易导致定位漂移
- 解决方案:例如 MHT(Multiple Hypothesis Tracking)方法,通过生成多个假设来优化全局定位,或者结合视觉方案提高定位准确性
- 动态环境定位 (Dynamic Localization)
- 问题描述:在包含动态物体的环境中,SLAM 系统往往难以区分静态与动态物体,进而影响地图精度和定位稳定性
- 应用场景:如商场、繁忙街道等
- 解决方案:可以通过 DTAM(Dynamic Texture and Motion)进行动态物体的跟踪,结合路径规划算法来优化机器人的运动轨迹,提升动态环境下的稳定性和精度
这些问题在不同的 SLAM 实施中会有所体现,尤其是在复杂环境或动态场景中,如何进行 效的动态更新与全局定位,是当前 SLAM 系统研究中的重点。
Q&A
老师说:
- 激光-惯导融合没有什么必要,没有里程计那么好用(假定是便宜的IMU)
- 视觉-激光的体系比较深,不好讲清楚
- IMU+雷达挺靠谱的。但是加个里程计更加靠谱
- 3Dslam在自动驾驶上是很重要的(因为要高精地图(但不仅仅是3Dslam)),而且包含所有的室外场景。
- 摄像头数据和3D雷达数据的区别:3D雷达数据可以给摄像头数据提供深度信息。(视觉-激光融合方案)
- 里程计是有姿态信息的
- VEO?+轮式里程计是一个非常有前途的对象。VIO(激光slam的普遍方案)。因为轮式里程计的精度比IMU高太多了,所以VEO的效果应该比VIO高很多(但只限于平面环境下)
- 2Dslam在无人机上的应用是有的,但是效果一般。(视觉好一点,因为3d激光太贵了)
- 图优化当回环错误会导致图变形
- 在室外用GPS辅助激光slam更好。虽然GPS有10cm的误差,但是不飘移。
- 激光雷达一帧就是其旋转一圈。
- 里程计得到位姿(基础性学习,老师说这块比较容易知道)
- GPS+IMU+ODOM不会是一般的方案,基本上需要加上slam。一起做。
- cartographer还是非常完善的开源算法的。
- 基于地图的AMCL定位当然是可以的,但是AMCL的问题在于它有非常多的缺陷。就是当地图有大的变动的时候,AMCL非常容易发生错误,而且它的全局定位基本不成功。拉毛。
- cartographer3d用的是点云,2d用的是栅格
- 里程计一般不是单一传感器,而是两个轮子共同组成的系统。
- 3D导航一般是在室外高精地图上
- 融合的传感器越多,意味着定位地越鲁棒而不是越好
- 激光的运动畸变很难一下说清楚
- 滤波和非线性优化的融合还是很好实现的
- 退化环境:走廊等(特别对二维来说),就是传感器无法进行足够的约束。
- 3D雷达的标定方法和图像标定非常相似。
- 在提供足够约束的情况下,2Dslam和3Dslam没什么区别。
- 特征点的判断方法很多(如曲率判断(大的就是角点)等方法,以及各种数据集)
- 最好自己写一个,而不是用ROS的包。效果缺失不是很好(ROS的导航包不是很完善,ROS本身也有缺陷(不确定是否包含ROS2))。自己写的话,包括代码的复现以及通信系统的完善。ROS的导航包非常一般(做demo还行)
- 卡尔曼滤波中的误差系统模型?基本上是根据feature-based的特征地图,提取特征,然后通过特征匹配的不确定度,来确定误差的协方差。
- 课程中暂时不涉及3Dslam

















 7215
7215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









