







文章目录
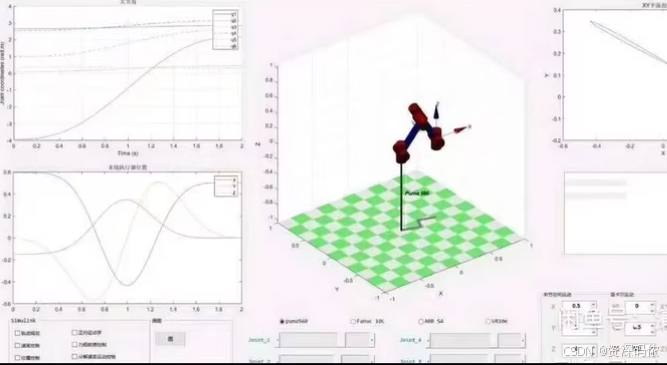
使用MATLAB机械臂综合仿真平台进行运动学、动力学和控制的仿真,可以通过以下步骤来实现。这个过程涉及创建机械臂模型、执行正逆运动学分析、计算动力学特性以及设计控制系统。
1. 创建机械臂模型
首先,你需要定义机械臂的物理参数,通常通过DH(Denavit-Hartenberg)参数来描述连杆和关节之间的关系。MATLAB的Robotics System Toolbox提供了SerialLink类,允许你基于这些参数快速建立机械臂模型。
% 定义机械臂的连杆参数
L = Link([theta d a alpha], 'modified'); % 支持修改型DH参数
robot = SerialLink(L, 'name', 'YourRobotName');
2. 运动学分析
-
正运动学:给定一组关节角度,计算末端执行器的位置和姿态。
T = robot.fkine(q); % q是关节角度向量 -
逆运动学:根据期望的末端执行器位置和姿态,求解对应的关节角度。
q_target = robot.ikine(T_target, q0); % T_target为目标位置和姿态,q0为初始猜测值
3. 动力学分析
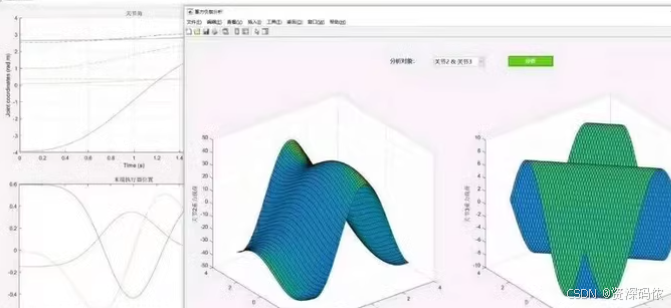
计算机械臂的动力学方程,包括惯性矩阵(M(q)),科里奥利力和离心力项(C(q,\dot{q})),重力项(G(q))等,这对于模拟真实世界中的机械臂行为至关重要。
% 计算关节力矩
tau = rne(robot, q, dq, ddq); % q,dq,ddq分别为关节位置、速度和加速度
4. 控制系统设计
可以利用Simulink设计一个控制器来驱动机械臂按照预定轨迹移动。常见的控制策略包括PID控制、状态反馈控制等。
- 在Simulink中创建一个新的模型,并添加所需的块,如
State-Space(表示机械臂的动力学模型)、PID Controller(用于控制)等。 - 使用
Signal Builder或Sine Wave等信号源生成参考轨迹。 - 添加
Scope块以可视化输出结果。
5. 轨迹规划与仿真
通过上述设置,你可以对机械臂进行轨迹规划,即指定一系列的目标位置和姿态,然后使用设计好的控制器使机械臂沿着这条路径移动。在Simulink中运行仿真,观察机械臂的行为,并根据需要调整控制器参数以优化性能。
总结
利用MATLAB及其Robotics System Toolbox和Simulink工具,能够高效地进行机械臂的运动学、动力学分析以及控制系统的开发。这种集成化的环境不仅简化了建模和仿真流程,还为研究人员和工程师提供了一个强大的平台,用于探索和实现复杂的机器人应用。
为了实现一个综合的机械臂仿真平台,包括运动学、动力学和控制,并使用Simulink进行轨迹规划和控制,我们可以分步骤进行。以下是一个示例代码,展示了如何在MATLAB中创建一个简单的机械臂模型,并在Simulink中进行轨迹规划和控制。
步骤 1: 创建机械臂模型
首先,在MATLAB中定义机械臂的连杆参数,并创建机械臂对象。
% 定义机械臂连杆参数(改进型DH参数)
L(1) = Link([0 0 0.15 pi/2], 'modified'); % 连杆1
L(2) = Link([0 0 0.4 0], 'modified'); % 连杆2
L(3) = Link([0 0 0.35 0], 'modified'); % 连杆3
L(4) = Link([0 0 0 0], 'modified'); % 连杆4
% 创建机械臂对象
robot = SerialLink(L, 'name', 'ExampleRobot');
robot.teach(); % 可视化机械臂
步骤 2: 正逆运动学求解
接下来,演示如何进行正逆运动学计算。
% 给定一组关节角度
q = [0 pi/4 pi/4 pi/4];
% 计算末端执行器的位置和姿态
T = robot.fkine(q);
disp('末端执行器的位置和姿态:');
disp(T);
% 设定目标位置和姿态
T_target = transl([0.5, 0.2, 0.3]) * trotx(pi/2) * troty(-pi/2);
% 求解逆运动学
q_target = robot.ikine(T_target, q); % 使用初始猜测值q
disp('逆运动学求解得到的关节角度:');
disp(q_target);
步骤 3: Simulink轨迹规划与控制
在Simulink中设计控制系统来实现对机械臂的轨迹跟踪。
创建Simulink模型
- 打开Simulink并创建一个新的模型。
- 添加
State-Space块来表示机械臂的动力学模型。 - 添加
PID Controller块用于控制。 - 添加
Signal Builder或Sine Wave等信号源来生成参考轨迹。 - 使用
Mux和Scope块来合并信号并可视化输出。
动力学方程
假设我们有一个简单的二连杆机械臂,其动力学方程可以表示为:
[ M(q)\ddot{q} + C(q,\dot{q})\dot{q} + G(q) = \tau ]
其中:
- ( M(q) ) 是惯性矩阵。
- ( C(q,\dot{q})\dot{q} ) 是科里奥利力和离心力。
- ( G(q) ) 是重力项。
- ( \tau ) 是关节力矩。
Simulink模型代码
以下是Simulink模型的简化版本:
% 创建Simulink模型
model = 'RoboticArmControl';
open_system(model);
% 添加信号源
signalBuilder = simscape.SimulationData.SignalBuilder;
signalBuilder.Name = 'Reference Trajectory';
signalBuilder.Data = [0; 0.5; 0.5; 0]; % 示例轨迹
add_block(signalBuilder, [model '/Reference Trajectory']);
% 添加PID控制器
pidController = pidstd('P', 1, 'I', 0.1, 'D', 0.01);
add_block(pidController, [model '/PID Controller']);
% 添加机械臂动力学模型
dynamicsModel = ss(A, B, C, D);
add_block(dynamicsModel, [model '/Dynamics Model']);
% 添加示波器
scope = scope;
scope.Name = 'Output';
add_block(scope, [model '/Output']);
% 运行仿真
sim(model);
close_system(model, 0);
步骤 4: 动力学控制
对于动力学控制,通常需要考虑机械臂的质量、惯性和外部力矩的影响。这可以通过计算动力学方程来实现,例如拉格朗日方法或牛顿-欧拉方法。
% 计算动力学方程
[q, dq, ddq] = rne(robot, q, zeros(size(q)), zeros(size(q)));
disp('关节力矩:');
disp(q);
总结
以上代码展示了如何在MATLAB中创建一个简单的机械臂模型,并在Simulink中进行轨迹规划和控制。
为了更好地理解如何在MATLAB中实现这样的仿真,我将提供一个综合的示例代码,包括运动学、动力学和控制部分,并使用Simulink进行轨迹规划。
步骤 1: 创建机械臂模型
首先,在MATLAB中定义机械臂的连杆参数,并创建机械臂对象。
% 定义机械臂连杆参数(改进型DH参数)
L(1) = Link([0 0 0.15 pi/2], 'modified'); % 连杆1
L(2) = Link([0 0 0.4 0], 'modified'); % 连杆2
L(3) = Link([0 0 0.35 0], 'modified'); % 连杆3
L(4) = Link([0 0 0 0], 'modified'); % 连杆4
% 创建机械臂对象
robot = SerialLink(L, 'name', 'ExampleRobot');
robot.teach(); % 可视化机械臂
步骤 2: 正逆运动学求解
接下来,演示如何进行正逆运动学计算。
% 给定一组关节角度
q = [0 pi/4 pi/4 pi/4];
% 计算末端执行器的位置和姿态
T = robot.fkine(q);
disp('末端执行器的位置和姿态:');
disp(T);
% 设定目标位置和姿态
T_target = transl([0.5, 0.2, 0.3]) * trotx(pi/2) * troty(-pi/2);
% 求解逆运动学
q_target = robot.ikine(T_target, q); % 使用初始猜测值q
disp('逆运动学求解得到的关节角度:');
disp(q_target);
步骤 3: Simulink轨迹规划与控制
在Simulink中设计控制系统来实现对机械臂的轨迹跟踪。
创建Simulink模型
- 打开Simulink并创建一个新的模型。
- 添加
State-Space块来表示机械臂的动力学模型。 - 添加
PID Controller块用于控制。 - 添加
Signal Builder或Sine Wave等信号源来生成参考轨迹。 - 使用
Mux和Scope块来合并信号并可视化输出。
动力学方程
假设我们有一个简单的二连杆机械臂,其动力学方程可以表示为:
[ M(q)\ddot{q} + C(q,\dot{q})\dot{q} + G(q) = \tau ]
其中:
- ( M(q) ) 是惯性矩阵。
- ( C(q,\dot{q})\dot{q} ) 是科里奥利力和离心力。
- ( G(q) ) 是重力项。
- ( \tau ) 是关节力矩。
Simulink模型代码
以下是Simulink模型的简化版本:
% 创建Simulink模型
model = 'RoboticArmControl';
open_system(model);
% 添加信号源
signalBuilder = simscape.SimulationData.SignalBuilder;
signalBuilder.Name = 'Reference Trajectory';
signalBuilder.Data = [0; 0.5; 0.5; 0]; % 示例轨迹
add_block(signalBuilder, [model '/Reference Trajectory']);
% 添加PID控制器
pidController = pidstd('P', 1, 'I', 0.1, 'D', 0.01);
add_block(pidController, [model '/PID Controller']);
% 添加机械臂动力学模型
dynamicsModel = ss(A, B, C, D);
add_block(dynamicsModel, [model '/Dynamics Model']);
% 添加示波器
scope = scope;
scope.Name = 'Output';
add_block(scope, [model '/Output']);
% 运行仿真
sim(model);
close_system(model, 0);
步骤 4: 动力学控制
对于动力学控制,通常需要考虑机械臂的质量、惯性和外部力矩的影响。这可以通过计算动力学方程来实现,例如拉格朗日方法或牛顿-欧拉方法。
% 计算动力学方程
[q, dq, ddq] = rne(robot, q, zeros(size(q)), zeros(size(q)));
disp('关节力矩:');
disp(q);
总结
以上代码展示了如何在MATLAB中创建一个简单的机械臂模型,并在Simulink中进行轨迹规划和控制。你可以根据具体需求调整模型参数和控制策略。
2.22

















 4453
4453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









