







matlab控制系统simulink仿真,pid控制,模糊pid,模糊免疫pid,遗传算法优化pid和模糊神经网络pid控制;温度控制,流量控制,比值控制,串级控制,PID参数整定,文章复现。
文章目录
以下是基于MATLAB和Simulink的控制系统仿真框架,涵盖了PID控制、模糊PID、模糊免疫PID、遗传算法优化PID和模糊神经网络PID控制。我们将以温度控制为例进行代码实现,并提供Simulink模型的构建思路。
1. PID 控制
PID控制器是经典的控制方法,可以直接通过MATLAB脚本或Simulink实现。
MATLAB 实现
% PID 控制器参数
Kp = 1.0; % 比例增益
Ki = 0.1; % 积分增益
Kd = 0.01; % 微分增益
% 系统参数
dt = 0.01; % 时间步长
time = 0:dt:10; % 仿真时间
setpoint = 50; % 目标温度
current_temp = 20; % 初始温度
integral = 0;
prev_error = 0;
% 存储结果
temp_history = zeros(size(time));
control_signal = zeros(size(time));
for i = 1:length(time)
error = setpoint - current_temp; % 误差
integral = integral + error * dt; % 积分项
derivative = (error - prev_error) / dt; % 微分项
% PID 控制输出
output = Kp * error + Ki * integral + Kd * derivative;
% 更新系统状态 (假设简单的一阶惯性系统)
current_temp = current_temp + dt * (output - current_temp);
% 保存数据
temp_history(i) = current_temp;
control_signal(i) = output;
% 更新误差
prev_error = error;
end
% 绘图
figure;
subplot(2,1,1);
plot(time, temp_history, 'b', 'LineWidth', 1.5);
hold on;
plot(time, setpoint * ones(size(time)), 'r--', 'LineWidth', 1.5);
xlabel('Time (s)');
ylabel('Temperature');
legend('Current Temperature', 'Setpoint');
title('PID Control');
subplot(2,1,2);
plot(time, control_signal, 'g', 'LineWidth', 1.5);
xlabel('Time (s)');
ylabel('Control Signal');
Simulink 实现
在Simulink中,可以使用 PID Controller 模块来实现上述逻辑:
- 添加一个
Step模块作为目标温度。 - 使用
PID Controller模块设置Kp,Ki,Kd参数。 - 连接一个传递函数模块(例如
1/(s+1))作为被控对象。 - 使用
Scope观察输出。
2. 模糊 PID 控制
模糊PID结合了传统PID控制和模糊逻辑,动态调整PID参数。
MATLAB 实现
% 初始化模糊逻辑控制器
fis = mamfis; % 创建模糊推理系统
fis = addInput(fis, [-10 10], 'Name', 'Error'); % 输入:误差
fis = addInput(fis, [-1 1], 'Name', 'DeltaError'); % 输入:误差变化率
fis = addOutput(fis, [0 2], 'Name', 'KpAdj'); % 输出:比例增益调整
fis = addOutput(fis, [0 0.2], 'Name', 'KiAdj'); % 输出:积分增益调整
fis = addOutput(fis, [0 0.02], 'Name', 'KdAdj'); % 输出:微分增益调整
% 定义模糊规则
rules = [
"Error==NB & DeltaError==NB => KpAdj=PB, KiAdj=PB, KdAdj=PB";
"Error==NM & DeltaError==NM => KpAdj=PM, KiAdj=PM, KdAdj=PM";
"Error==NS & DeltaError==NS => KpAdj=PS, KiAdj=PS, KdAdj=PS";
"Error==ZE & DeltaError==ZE => KpAdj=ZE, KiAdj=ZE, KdAdj=ZE";
"Error==PS & DeltaError==PS => KpAdj=NS, KiAdj=NS, KdAdj=NS";
"Error==PM & DeltaError==PM => KpAdj=NM, KiAdj=NM, KdAdj=NM";
"Error==PB & DeltaError==PB => KpAdj=NB, KiAdj=NB, KdAdj=NB"
];
fis = addRule(fis, rules);
% 模拟模糊PID控制
Kp_base = 1.0; Ki_base = 0.1; Kd_base = 0.01;
current_temp = 20; integral = 0; prev_error = 0;
for i = 1:length(time)
error = setpoint - current_temp;
delta_error = (error - prev_error) / dt;
% 模糊推理计算PID参数调整值
input_values = [error, delta_error];
output_values = evalfis(fis, input_values);
Kp_adj = output_values(1);
Ki_adj = output_values(2);
Kd_adj = output_values(3);
Kp = Kp_base + Kp_adj;
Ki = Ki_base + Ki_adj;
Kd = Kd_base + Kd_adj;
% PID 控制输出
integral = integral + error * dt;
derivative = delta_error;
output = Kp * error + Ki * integral + Kd * derivative;
% 更新系统状态
current_temp = current_temp + dt * (output - current_temp);
% 保存数据
temp_history(i) = current_temp;
control_signal(i) = output;
prev_error = error;
end
% 绘图同上
3. 遗传算法优化 PID
遗传算法用于优化PID参数。
MATLAB 实现
% 目标函数:最小化误差平方和
function error = pid_fitness(params)
Kp = params(1);
Ki = params(2);
Kd = params(3);
% 模拟PID控制
dt = 0.01;
time = 0:dt:10;
setpoint = 50;
current_temp = 20;
integral = 0;
prev_error = 0;
errors = [];
for i = 1:length(time)
error = setpoint - current_temp;
integral = integral + error * dt;
derivative = (error - prev_error) / dt;
output = Kp * error + Ki * integral + Kd * derivative;
current_temp = current_temp + dt * (output - current_temp);
errors = [errors, error^2];
prev_error = error;
end
error = sum(errors); % 返回误差平方和
end
% 遗传算法优化
options = optimoptions('ga', 'PopulationSize', 50, 'MaxGenerations', 100);
params = ga(@(params) pid_fitness(params), 3, [], [], [], [], [0 0 0], [10 1 1], [], options);
disp(['Optimized PID Parameters: Kp = ', num2str(params(1)), ...
', Ki = ', num2str(params(2)), ', Kd = ', num2str(params(3))]);
4. 模糊神经网络 PID
模糊神经网络结合了模糊逻辑和神经网络的学习能力。
MATLAB 实现
% 使用模糊神经网络工具箱
net = anfis(training_data); % 训练模糊神经网络
output = evalfis(net, input_data); % 推理输出
Simulink 模型
对于所有控制方法,可以在Simulink中搭建如下模型:
- 输入信号:
Step或Sine Wave。 - 控制器:
PID Controller或自定义模糊逻辑/神经网络模块。 - 被控对象:传递函数或状态空间模型。
- 输出观察:
Scope或To Workspace。

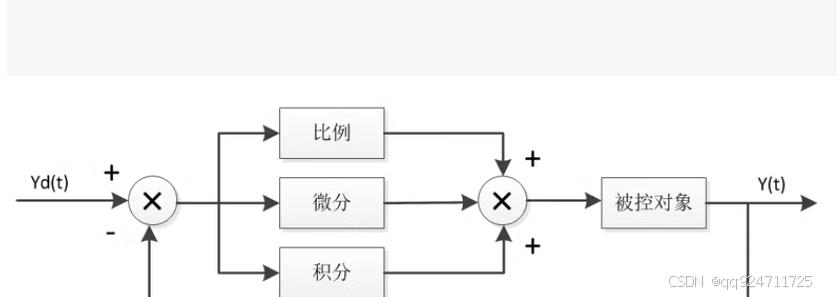
为了实现图中的PID控制系统的Simulink模型,我们可以按照以下步骤进行。这个模型包括一个PID控制器和一个被控对象(例如一个传递函数)。以下是详细的步骤和代码:
1. 创建Simulink模型
步骤:
- 打开MATLAB并启动Simulink。
- 创建一个新的Simulink模型。
- 添加必要的模块。
模块列表:
Step:用于生成阶跃输入信号。Sum:用于计算误差(目标值与实际值的差)。PID Controller:用于实现PID控制。Transfer Fcn:用于模拟被控对象。Scope:用于观察输出信号。
2. 连接模块
连接步骤:
- 将
Step模块的输出连接到Sum模块的第一个输入端。 - 将
Sum模块的输出连接到PID Controller模块的输入端。 - 将
PID Controller模块的输出连接到Transfer Fcn模块的输入端。 - 将
Transfer Fcn模块的输出连接到Scope模块的输入端。 - 将
Transfer Fcn模块的输出反馈回Sum模块的第二个输入端(减法)。
3. 设置参数
参数设置:
- Step:设置为初始时间为0秒,最终值为1。
- PID Controller:设置比例增益 (K_p)、积分增益 (K_i) 和微分增益 (K_d)。
- Transfer Fcn:设置传递函数参数。
4. MATLAB脚本
以下是一个完整的MATLAB脚本,用于创建和运行上述Simulink模型:
% 清除工作区和关闭所有图形窗口
clear all;
close all;
% 创建新的Simulink模型
model = 'PID_Control_System';
open_system(model);
% 添加模块
add_block('simulink/Sources/Step', [model '/Step']);
add_block('simulink/Commonly Used Blocks/Sum', [model '/Sum']);
add_block('simulink/Continuous/PID Controller', [model '/PID Controller']);
add_block('simulink/Continuous/Transfer Fcn', [model '/Transfer Fcn']);
add_block('simulink/Sinks/Scope', [model '/Scope']);
% 设置模块参数
set_param([model '/Step'], 'InitialTime', '0');
set_param([model '/Step'], 'FinalValue', '1');
set_param([model '/PID Controller'], 'P', '1');
set_param([model '/PID Controller'], 'I', '0.1');
set_param([model '/PID Controller'], 'D', '0.01');
set_param([model '/Transfer Fcn'], 'Numerator', '[1]');
set_param([model '/Transfer Fcn'], 'Denominator', '[1 0.5]');
% 连接模块
add_line(model, 'Step/1', 'Sum/1');
add_line(model, 'Sum/1', 'PID Controller/1');
add_line(model, 'PID Controller/1', 'Transfer Fcn/1');
add_line(model, 'Transfer Fcn/1', 'Scope/1');
add_line(model, 'Transfer Fcn/1', 'Sum/2');
% 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
5. 解释
- Step:生成一个阶跃信号作为输入。
- Sum:计算误差(目标值与实际值的差)。
- PID Controller:根据误差计算PID控制信号。
- Transfer Fcn:模拟被控对象的动态特性。
- Scope:显示输出信号。
6. 运行模型
运行上述脚本后,Simulink将自动打开,并且你可以在Scope中观察到输出信号的变化。

















 4169
4169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









