







 本文介绍了基于MATLAB simulink的模糊PID控制器设计与仿真过程。首先,阐述了模糊PID控制器的理论基础,指出其在传统PID基础上结合模糊推理进行参数整定的优势。接着,详细描述了一个模糊PID控制器的案例背景,强调了改进的必要性。在simulink环境中,详细展示了建模步骤,并给出了模糊控制器的参数设置和仿真结果。最终,仿真表明模糊PID控制器能提供更快的响应速度和更小的超调量。
本文介绍了基于MATLAB simulink的模糊PID控制器设计与仿真过程。首先,阐述了模糊PID控制器的理论基础,指出其在传统PID基础上结合模糊推理进行参数整定的优势。接着,详细描述了一个模糊PID控制器的案例背景,强调了改进的必要性。在simulink环境中,详细展示了建模步骤,并给出了模糊控制器的参数设置和仿真结果。最终,仿真表明模糊PID控制器能提供更快的响应速度和更小的超调量。
目录
一、理论基础
传统的PID控制算法是按照偏差的比例、积分和微分进行控制的。PID控制由于它原理简单,使用方便,鲁棒性强等优点,在工业生产过程中仍得到广泛的应用。传统PID调节器以消除误差和外扰为目的,其基本结构如图1所示。


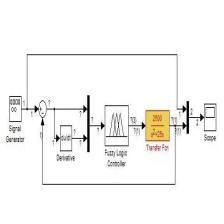
而模糊PID控制器,其中模糊模块的结构如如图2所示。模糊PID控制器由常规PID控制和模糊推理两部分组成,模糊推理部分的输入是偏差E和偏差变化率EC,输出量是deltaKp、deltaKi和deltaKd。PID参数模糊自整定就是找出PID三个参数和,之间的模糊关系,在运行中不断检测和,根据模糊控制原理来对三个参数进行整定。

考虑到控制规则的灵活与细致性兼顾其简单与易行的要求,这里选取七个语言等级作为本文所设计的模糊控制器的语言等

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2194
2194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











