







 本文介绍了如何在TP程序中创建一个基础的运动指令,包括将光标移动到指定位置并设置时间触发条件,如在J1动作前3秒触发DO20信号以及在移动到点位2前3mm触发信号。
本文介绍了如何在TP程序中创建一个基础的运动指令,包括将光标移动到指定位置并设置时间触发条件,如在J1动作前3秒触发DO20信号以及在移动到点位2前3mm触发信号。
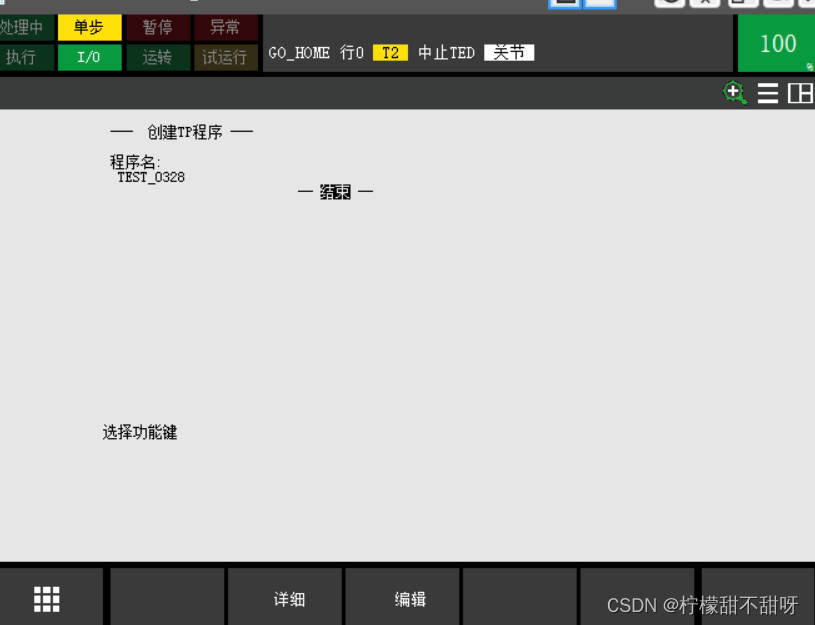
创建一个测试指令用的TP程序。
创建一个基础的运动指令,将光标移动至指令最后的空格栏,点击下方的选择按钮。

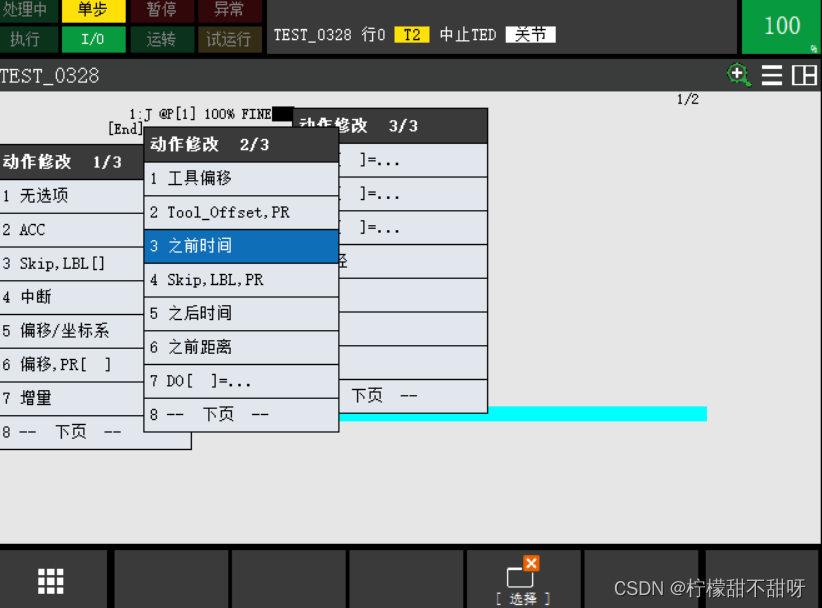
添加一个之前时间的动作,TB代表是J1动作之前几秒触发

下述这行语句代表的是在完成J1动作的前3S触发一个DO20为真的一个信号。
创建一个测试指令用的TP程序。
创建一个基础的运动指令,将光标移动至指令最后的空格栏,点击下方的选择按钮。
添加一个之前时间的动作,TB代表是J1动作之前几秒触发
下述这行语句代表的是在完成J1动作的前3S触发一个DO20为真的一个信号。
 1631
9289
3725
1631
9289
3725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























