







FANUC机器人KAREL基本数据类型有下述几种:

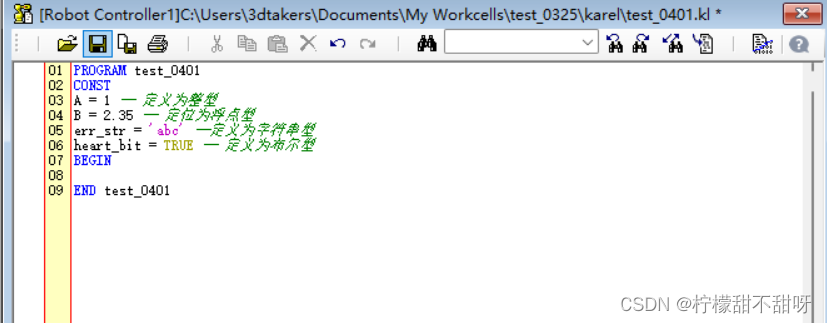
FANUC常量机器人申明示例:
FANUC变量申明的语法表:

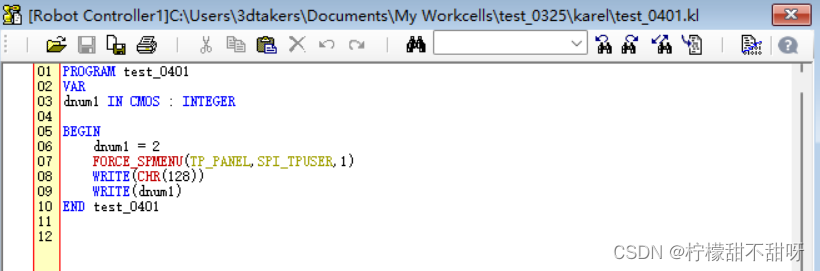
FANUC机器人的存储模式:
DREM:关机后清空内存数据
CMOS:断电保持,不清空被赋值后的数据
如果不做存储定义,内存格式默认为DREM
定义储存类型,如下示例所示:
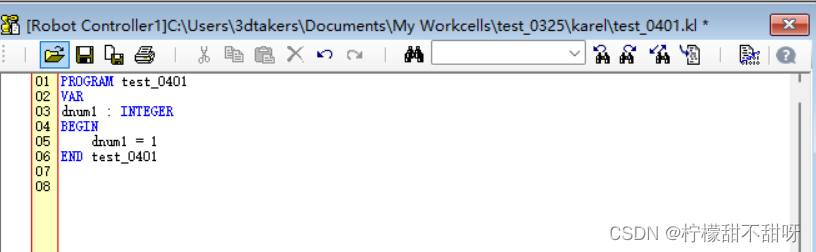
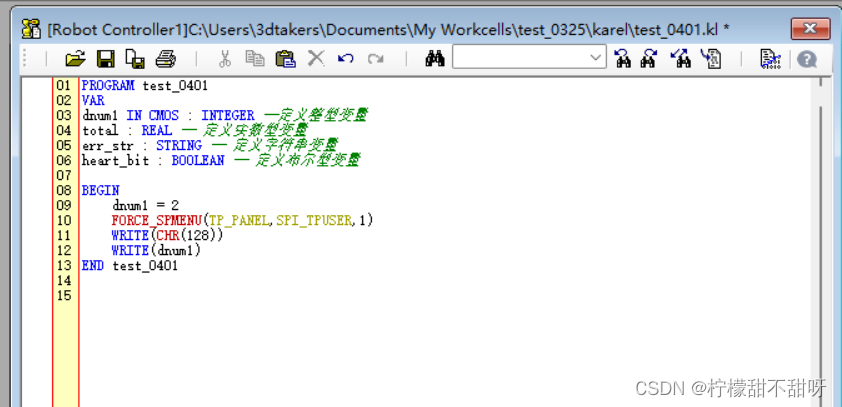
FANUC机器人变量申明示例:
 本文详细介绍了FANUC机器人编程中使用的KAREL语言的基本数据类型,常量和变量的申明方法,以及DREM和CMOS两种不同的存储模式,重点讨论了内存数据的清除和保持策略。
本文详细介绍了FANUC机器人编程中使用的KAREL语言的基本数据类型,常量和变量的申明方法,以及DREM和CMOS两种不同的存储模式,重点讨论了内存数据的清除和保持策略。
FANUC机器人KAREL基本数据类型有下述几种:
FANUC常量机器人申明示例:
FANUC变量申明的语法表:
FANUC机器人的存储模式:
DREM:关机后清空内存数据
CMOS:断电保持,不清空被赋值后的数据
如果不做存储定义,内存格式默认为DREM
定义储存类型,如下示例所示:
FANUC机器人变量申明示例:
 72
72











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























