







1.基础
纠正一个思想,即要具有模块化的思维,面对整体中模块是不要考虑其他,就仅考虑如何将一个类抽象出来,思考实现怎样的功能。前面的总结学习我认为是错误的学习方法,并不系统。我的目的:借鉴学习别人的编程思想,总结规律,归纳步骤,以解决新的问题。当然,前提是理论知识要熟悉。
(1)Camera类
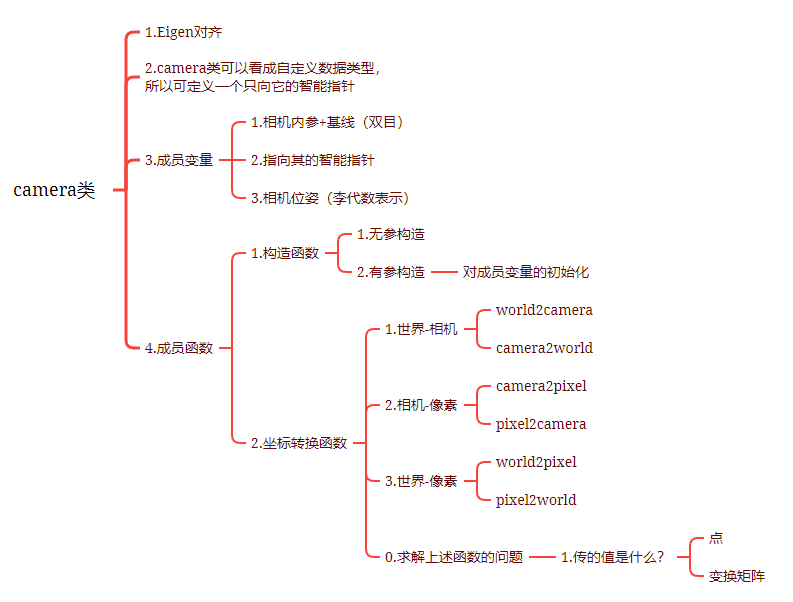
上述思维导图将思路列了出来,下面是关注细节。
主要是坐标转换
1 世界坐标系下的点转换到相机坐标系下:
P
c
=
T
c
w
P
w
P_c = T_{cw}P_w
Pc=TcwPw
代码中有pose原因:初始位置相机坐标系与世界坐标系并不重合。
2 相机坐标系到像素坐标系:
P
u
v
=
K
Z
P
c
P_{uv}=\frac{K}{Z}P_c
Puv=ZKPc
3.由上述公式很容易写出世界到像素的代码
Vec3 Camera::world2camera(const Vec3 &p_w, const SE3 &T_c_w) {
return pose_ * T_c_w * p_w;
}
Vec3 Camera::camera2world(const Vec3 &p_c, const SE3 &T_c_w) {
return T_c_w.inverse() * pose_inv_ * p_c;
}
Vec2 Camera::camera2pixel(const Vec3 &p_c) {
return Vec2(
fx_ * p_c(0, 0) / p_c(2, 0) + cx_,
fy_ * p_c(1, 0) / p_c(2, 0) + cy_
);
}
Vec3 Camera::pixel2camera(const Vec2 &p_p, double depth) {
return Vec3(
(p_p(0, 0) - cx_) * depth / fx_,
(p_p(1, 0) - cy_) * depth / fy_,
depth
);
}
Vec2 Camera::world2pixel(const Vec3 &p_w, const SE3 &T_c_w) {
return camera2pixel(world2camera(p_w, T_c_w));
}
Vec3 Camera::pixel2world(const Vec2 &p_p, const SE3 &T_c_w, double depth) {
return camera2world(pixel2camera(p_p, depth), T_c_w);
}
(2)Frame类
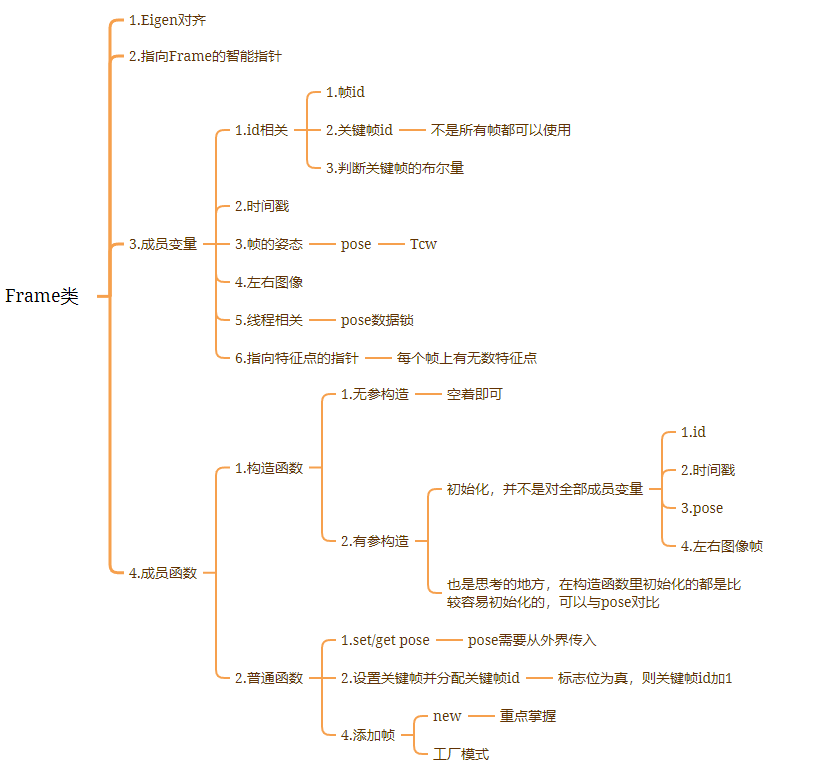
1 对pose的操作(记得在初学C++时也有类似的操作)
SE3 Pose() {
std::unique_lock<std::mutex> lck(pose_mutex_);
return pose_;
}
void SetPose(const SE3 &pose) {
std::unique_lock<std::mutex> lck(pose_mutex_);
pose_ = pose;
}
2 创建帧–>设置关键帧
创建帧:返回一个指向帧的指针
Frame::Ptr Frame::CreateFrame() {
static long factory_id = 0;
Frame::Ptr new_frame(new Frame);
new_frame->id_ = factory_id++;
return new_frame;
}
void Frame::SetKeyFrame() {
static long keyframe_factory_id = 0;
is_keyframe_ = true;
keyframe_id_ = keyframe_factory_id++;
}
(3)Feature类
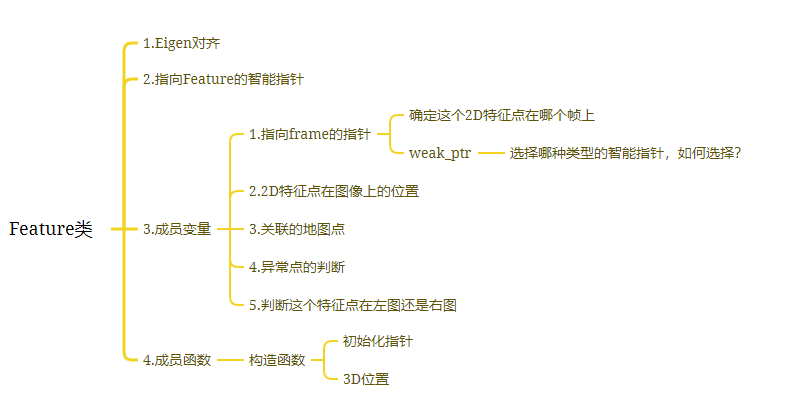
看上去这个类很简单,就几个成员变量,关键是如何想到?
感觉特征点起到一个桥梁作用:
1 特征点在图像上,那么2D位置在哪?
2 图像对应的3D路标点的位置
3 这个特征点在那一帧?
(4)MapPoint类
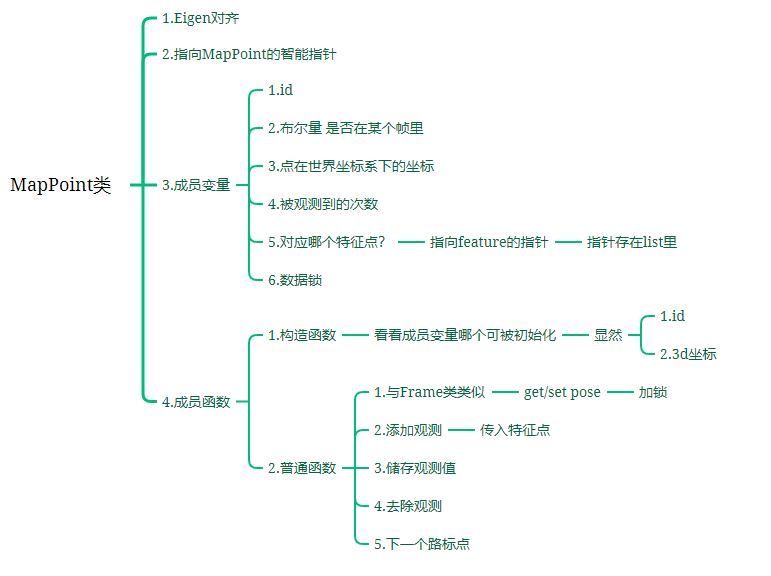
1 3D点的位置
Vec3 Pos() {
std::unique_lock<std::mutex> lck(data_mutex_);
return pos_;
}
void SetPos(const Vec3 &pos) {
std::unique_lock<std::mutex> lck(data_mutex_);
pos_ = pos;
}
2 2D观测值
void AddObservation(std::shared_ptr<Feature> feature) {
std::unique_lock<std::mutex> lck(data_mutex_);
observations_.push_back(feature);
observed_times_++;
}
std::list<std::weak_ptr<Feature>> GetObs() {
std::unique_lock<std::mutex> lck(data_mutex_);
return observations_;
}
上述有共通之处。
3 创建新路标点(与创建帧类似)
MapPoint::Ptr MapPoint::CreateNewMappoint() {
static long factory_id = 0;
MapPoint::Ptr new_mappoint(new MapPoint);
new_mappoint->id_ = factory_id++;
return new_mappoint;
}
4 移除观测
void MapPoint::RemoveObservation(std::shared_ptr<Feature> feat) {
std::unique_lock<std::mutex> lck(data_mutex_);
for (auto iter = observations_.begin(); iter != observations_.end(); iter++)
{
if (iter->lock() == feat) {
observations_.erase(iter); //erase() 删除
feat->map_point_.reset();
observed_times_--;
break;
}
}
}
这个代码看的有点头疼,复习了一下C++,写一下个人的理解,也更加深了对智能指针的理解:
第一,明确一个不太注意到的点(反正我没注意,或者说没在意,只想着当成指针来用了),智能指针是一个类,本质上是一个抽象的数据类型。第二,list的begin方法返回迭代器,想来想去不就是指针嘛。第三,如果从observations_里面存的指向feature的指针来说,迭代器不久成了二级指针嘛,为什么能调用weak_ptr的lock方法?这也是我最初的疑惑。第四,现在的理解:把weak_ptr看成一个类(当然,本来就是), 那么迭代器指向weak_ptr这个类,简单理解struct weak_ptr * iter,自然可以调用lock方法。
看懂了之后发现自己就是个傻X,这么简单还看老半天。。。C++不熟悉
删除观测点:遍历迭代器,找到要删除的位置,删除元素,释放内存,观测次数减一
(4.5)思考
根据上述所写的代码,每个类都要声明一个指向自己的指针:
typedef std::shared_ptr<Camera> Ptr;
typedef std::shared_ptr<Frame> Ptr;
typedef std::shared_ptr<Feature> Ptr;
typedef std::shared_ptr<MapPoint> Ptr;
在feature类里面,选择的是weak_ptr
std::weak_ptr<Frame> frame_; // 持有该feature的frame
cv::KeyPoint position_; // 2D提取位置
std::weak_ptr<MapPoint> map_point_; // 关联地图点
现在在脑子里还不是很清晰,与引用计数的关系以及为什么这样选择,暂时留一个问题吧。
(5)Map类
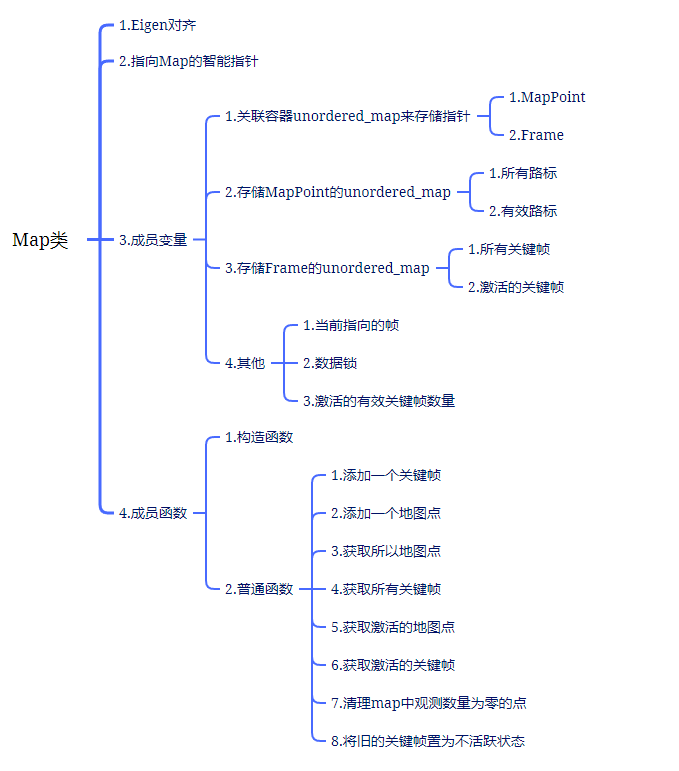
围绕帧和地图点来展开
1 添加一个关键帧/添加一个地图点
/*
添加关键帧逻辑:
1 传进一个指向某个帧的指针,设置为当前帧
2 判断是否在图里,根据id判断
若不在 添加进图
若在 新的替换老的 意义?
3 将活跃的设置在一定的范围内
*/
void Map::InsertKeyFrame(Frame::Ptr frame) {
current_frame_ = frame;
if (keyframes_.find(frame->keyframe_id_) == keyframes_.end()) //没找到
{
keyframes_.insert(make_pair(frame->keyframe_id_, frame));
active_keyframes_.insert(make_pair(frame->keyframe_id_, frame));
} else {
keyframes_[frame->keyframe_id_] = frame;
active_keyframes_[frame->keyframe_id_] = frame;
}
if (active_keyframes_.size() > num_active_keyframes_) {
RemoveOldKeyframe();
}
}
/*
添加地图点逻辑:
与上述 2 类似
*/
void Map::InsertMapPoint(MapPoint::Ptr map_point) {
if (landmarks_.find(map_point->id_) == landmarks_.end()) {
landmarks_.insert(make_pair(map_point->id_, map_point));
active_landmarks_.insert(make_pair(map_point->id_, map_point));
} else {
landmarks_[map_point->id_] = map_point;
active_landmarks_[map_point->id_] = map_point;
}
}
2 添加关键帧时,有一个去除关键帧的函数
/*
1 寻找与当前帧最近与最远的两个关键帧
遍历激活的关键帧
设置一个评价指标
找到最近与最远的id
2 判断删除哪一个
3 把要删除的帧从激活关键帧的map里删除
4 删除观测
遍历这一帧上的所有特征点
将特征点对应的3D路标点删除
*/
void Map::RemoveOldKeyframe() {
if (current_frame_ == nullptr) return;
// 寻找与当前帧最近与最远的两个关键帧
double max_dis = 0, min_dis = 9999;
double max_kf_id = 0, min_kf_id = 0;
auto Twc = current_frame_->Pose().inverse();
for (auto& kf : active_keyframes_) {
if (kf.second == current_frame_)
continue; //当前帧
auto dis = (kf.second->Pose() * Twc).log().norm(); //完全匹配为1?
if (dis > max_dis) {
max_dis = dis;
max_kf_id = kf.first;
}
if (dis < min_dis) {
min_dis = dis;
min_kf_id = kf.first;
}
}
const double min_dis_th = 0.2; // 最近阈值
Frame::Ptr frame_to_remove = nullptr;
if (min_dis < min_dis_th) {
// 如果存在很近的帧,优先删掉最近的
frame_to_remove = keyframes_.at(min_kf_id);
} else {
// 删掉最远的
frame_to_remove = keyframes_.at(max_kf_id);
}
LOG(INFO) << "remove keyframe " << frame_to_remove->keyframe_id_;
// remove keyframe and landmark observation
active_keyframes_.erase(frame_to_remove->keyframe_id_);
for (auto feat : frame_to_remove->features_left_) {
auto mp = feat->map_point_.lock();
if (mp) {
mp->RemoveObservation(feat);
}
}
for (auto feat : frame_to_remove->features_right_) {
if (feat == nullptr) continue;
auto mp = feat->map_point_.lock();
if (mp) {
mp->RemoveObservation(feat);
}
}
//清理map中观测数量为零的点
CleanMap();
}
3 清理map中观测数量为零的点 CleanMap函数
/*
1 遍历活跃的路标点
2 判断被观测的次数是否为0
为0 将其删除
不为0 再看其他的路标点
*/
void Map::CleanMap() {
int cnt_landmark_removed = 0;
for (auto iter = active_landmarks_.begin(); iter != active_landmarks_.end();)
{
if (iter->second->observed_times_ == 0) {
iter = active_landmarks_.erase(iter);
cnt_landmark_removed++;
} else {
++iter;
}
}
LOG(INFO) << "Removed " << cnt_landmark_removed << " active landmarks";
}
4 返回整体
/// 获取所有地图点
LandmarksType GetAllMapPoints() {
std::unique_lock<std::mutex> lck(data_mutex_);
return landmarks_;
}
/// 获取所有关键帧
KeyframesType GetAllKeyFrames() {
std::unique_lock<std::mutex> lck(data_mutex_);
return keyframes_;
}
/// 获取激活地图点
LandmarksType GetActiveMapPoints() {
std::unique_lock<std::mutex> lck(data_mutex_);
return active_landmarks_;
}
/// 获取激活关键帧
KeyframesType GetActiveKeyFrames() {
std::unique_lock<std::mutex> lck(data_mutex_);
return active_keyframes_;
}
(6)Dataset数据集
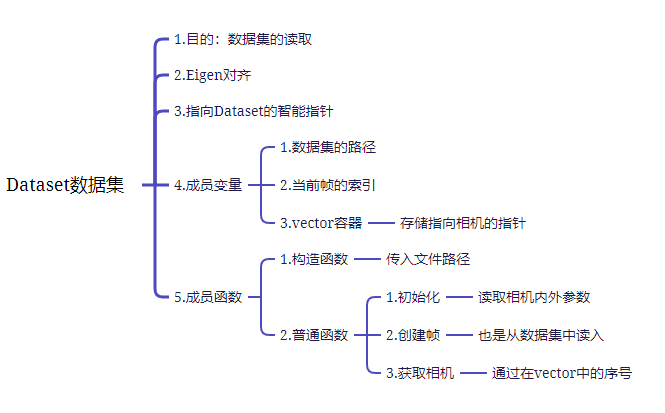
1 传感器安装位置
Kitti传感器主要包含相机(Cam0-4)、GPS/IMU、激光雷达(Velodyne Laserscanner)。本课题中只用到了相机,所以只讨论相机。
在calib.txt文件中P0到P4分别对应四个相机数据,其中,P0的原点为车辆坐标系原点,P0, P1, P2, P3 分别代表对应的相机内参矩阵, 大小为 3x4:
P
r
e
c
t
i
=
[
f
u
i
0
c
u
i
−
f
u
i
b
x
i
0
f
v
i
c
v
i
0
0
0
1
0
]
(3)
P^{i}_{rect}= \left[ \begin{matrix} f^i_u & 0 & c^i_u & -f^i_ub^i_x \\ 0 & f^i_v & c^i_v & 0 \\ 0 & 0 & 1 & 0 \end{matrix} \right] \tag{3}
Precti=⎣⎡fui000fvi0cuicvi1−fuibxi00⎦⎤(3)
第四列数据
−
f
u
i
b
x
i
-f^i_ub^i_x
−fuibxi 中的
b
x
i
b^i_x
bxi 表示此相机相对与车辆坐标系原点的距离,只有平移没有旋转。
通过 b ,将四个相机的相对关系描述出来。同时,b还是相机基线的距离
2 初始化
实例化相机
注:有一个编程细节问题,也算是可以学习的经验:代码中将内参矩阵缩小为原来的1/2,这样可以将图像缩小,运行起来看上去舒服。
/*
1 读入相机数据
相机名:P0-P3
相机内参数
2 实例化相机类,并初始化
3 存相机数据
*/
bool Dataset::Init() {
// read camera intrinsics and extrinsics
ifstream fin(dataset_path_ + "/calib.txt");
if (!fin) {
LOG(ERROR) << "cannot find " << dataset_path_ << "/calib.txt!";
return false;
}
for (int i = 0; i < 4; ++i) {
char camera_name[3];
for (int k = 0; k < 3; ++k) {
fin >> camera_name[k];
}
double projection_data[12];
for (int k = 0; k < 12; ++k) {
fin >> projection_data[k];
}
Mat33 K;
K << projection_data[0], projection_data[1], projection_data[2],
projection_data[4], projection_data[5], projection_data[6],
projection_data[8], projection_data[9], projection_data[10];
Vec3 t;
t << projection_data[3], projection_data[7], projection_data[11];
t = K.inverse() * t;
K = K * 0.5;
Camera::Ptr new_camera(new Camera(K(0, 0), K(1, 1), K(0, 2), K(1, 2),
t.norm(), SE3(SO3(), t)));
cameras_.push_back(new_camera);
LOG(INFO) << "Camera " << i << " extrinsics: " << t.transpose();
}
fin.close();
current_image_index_ = 0;
return true;
}
/// get camera by id
Camera::Ptr GetCamera(int camera_id) const {
return cameras_.at(camera_id);
}
3 读入图像
boost::format 的用法
boost::format fmt("%s/image%d ");
//fmt % "输出内容" % 1;
std::string s=(fmt % "输出内容" % 1).str();
std::cout<< s << std::endl;
/*
1 boost::format 将地址转成字符串
2 读入图片
3 修改图片大小 -> 与缩小相机内参矩阵对应
3 创建帧
*/
Frame::Ptr Dataset::NextFrame() {
boost::format fmt("%s/image_%d/%06d.png");
cv::Mat image_left, image_right;
// read images
image_left =
cv::imread((fmt % dataset_path_ % 0 % current_image_index_).str(),
cv::IMREAD_GRAYSCALE);
image_right =
cv::imread((fmt % dataset_path_ % 1 % current_image_index_).str(),
cv::IMREAD_GRAYSCALE);
if (image_left.data == nullptr || image_right.data == nullptr) {
LOG(WARNING) << "cannot find images at index " << current_image_index_;
return nullptr;
}
cv::Mat image_left_resized, image_right_resized;
cv::resize(image_left, image_left_resized, cv::Size(), 0.5, 0.5,
cv::INTER_NEAREST);
cv::resize(image_right, image_right_resized, cv::Size(), 0.5, 0.5,
cv::INTER_NEAREST);
auto new_frame = Frame::CreateFrame();
new_frame->left_img_ = image_left_resized;
new_frame->right_img_ = image_right_resized;
current_image_index_++;
return new_frame;
}
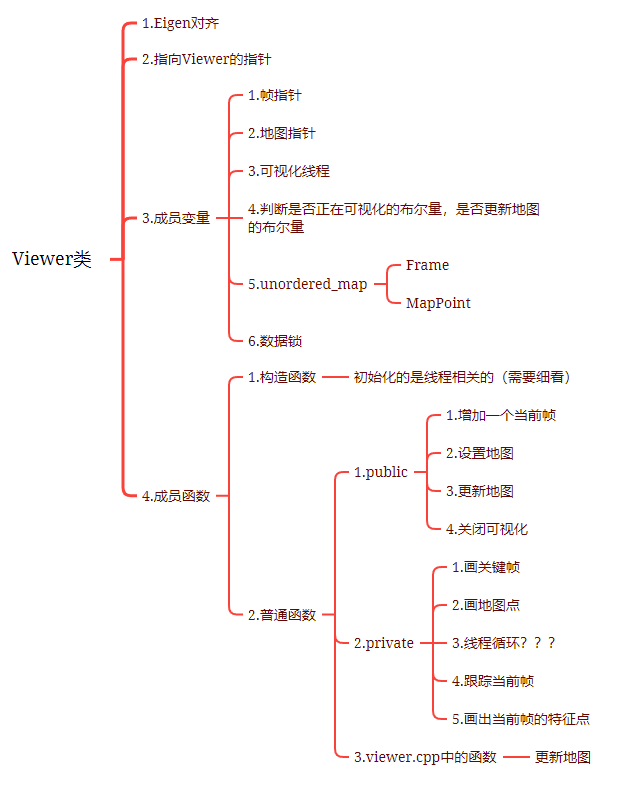
(7)Viewer类
RGB值表示颜色(常用的)
| RGB值 | 颜色 |
|---|---|
| [1 0 0] | 红色 |
| [0 1 0] | 绿色 |
| [0 0 1] | 蓝色 |
| [0 0 0] | 黑色 |
| [1 1 1] | 白色 |
| [1 1 0] | 黄色 |
1 使用Pangolin 绘制运行过程
/*
1 Pangolin 的使用步骤
2 循环里面
1 帧
2 路标点
3 图片 --另一个窗口
*/
void Viewer::ThreadLoop() {
// 1 创建 GUI 窗口
pangolin::CreateWindowAndBind("MySLAM", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
// 2 创建观察者视图
pangolin::OpenGlRenderState vis_camera(
pangolin::ProjectionMatrix(1024, 768, 400, 400, 512, 384, 0.1, 1000),
pangolin::ModelViewLookAt(0, -5, -10, 0, 0, 0, 0.0, -1.0, 0.0));
// Add named OpenGL viewport to window and provide 3D Handler
// 3 创建即
pangolin::View& vis_display =
pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(vis_camera));
const float blue[3] = {0, 0, 1};
const float green[3] = {0, 1, 0};
while (!pangolin::ShouldQuit() && viewer_running_) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
vis_display.Activate(vis_camera);
std::unique_lock<std::mutex> lock(viewer_data_mutex_);
if (current_frame_) {
DrawFrame(current_frame_, green);
FollowCurrentFrame(vis_camera);
cv::Mat img = PlotFrameImage();
cv::imshow("image", img);
cv::waitKey(1);
}
if (map_) {
DrawMapPoints();
}
pangolin::FinishFrame();
usleep(5000);
}
LOG(INFO) << "Stop viewer";
}
2 画出帧(类似相机的实物模型)
/*
当前帧绿色,其他为红色
疑问:为什么这样画模型?
*/
void Viewer::DrawFrame(Frame::Ptr frame, const float* color) {
SE3 Twc = frame->Pose().inverse();
const float sz = 1.0;
const int line_width = 2.0;
const float fx = 400;
const float fy = 400;
const float cx = 512;
const float cy = 384;
const float width = 1080;
const float height = 768;
glPushMatrix();
Sophus::Matrix4f m = Twc.matrix().template cast<float>();
glMultMatrixf((GLfloat*)m.data());
if (color == nullptr) {
glColor3f(1, 0, 0);
} else
glColor3f(color[0], color[1], color[2]);
glLineWidth(line_width);
glBegin(GL_LINES);
glVertex3f(0, 0, 0);
glVertex3f(sz * (0 - cx) / fx, sz * (0 - cy) / fy, sz);
glVertex3f(0, 0, 0);
glVertex3f(sz * (0 - cx) / fx, sz * (height - 1 - cy) / fy, sz);
glVertex3f(0, 0, 0);
glVertex3f(sz * (width - 1 - cx) / fx, sz * (height - 1 - cy) / fy, sz);
glVertex3f(0, 0, 0);
glVertex3f(sz * (width - 1 - cx) / fx, sz * (0 - cy) / fy, sz);
glVertex3f(sz * (width - 1 - cx) / fx, sz * (0 - cy) / fy, sz);
glVertex3f(sz * (width - 1 - cx) / fx, sz * (height - 1 - cy) / fy, sz);
glVertex3f(sz * (width - 1 - cx) / fx, sz * (height - 1 - cy) / fy, sz);
glVertex3f(sz * (0 - cx) / fx, sz * (height - 1 - cy) / fy, sz);
glVertex3f(sz * (0 - cx) / fx, sz * (height - 1 - cy) / fy, sz);
glVertex3f(sz * (0 - cx) / fx, sz * (0 - cy) / fy, sz);
glVertex3f(sz * (0 - cx) / fx, sz * (0 - cy) / fy, sz);
glVertex3f(sz * (width - 1 - cx) / fx, sz * (0 - cy) / fy, sz);
glEnd();
glPopMatrix();
}
/*
猜测:让镜头随着帧的运动而运动
Pangolin的深入功能及用法还不是很了解
*/
void Viewer::FollowCurrentFrame(pangolin::OpenGlRenderState& vis_camera) {
SE3 Twc = current_frame_->Pose().inverse();
pangolin::OpenGlMatrix m(Twc.matrix());
vis_camera.Follow(m, true);
}
3 图像
/*
把看到的路标点对应的特征点可视化
*/
cv::Mat Viewer::PlotFrameImage() {
cv::Mat img_out;
cv::cvtColor(current_frame_->left_img_, img_out, CV_GRAY2BGR);
for (size_t i = 0; i < current_frame_->features_left_.size(); ++i) {
if (current_frame_->features_left_[i]->map_point_.lock()) {
auto feat = current_frame_->features_left_[i];
cv::circle(img_out, feat->position_.pt, 2, cv::Scalar(0, 250, 0), 2);
}
}
return img_out;
}
4 3D路标点
void Viewer::DrawMapPoints() {
const float red[3] = {1.0, 0, 0};
for (auto& kf : active_keyframes_) {
DrawFrame(kf.second, red);
}
glPointSize(2);
glBegin(GL_POINTS);
for (auto& landmark : active_landmarks_) {
auto pos = landmark.second->Pos();
glColor3f(red[0], red[1], red[2]);
glVertex3d(pos[0], pos[1], pos[2]);
}
glEnd();
}
以上与可视化相关,感觉有点困难
5 读入参数
void Viewer::AddCurrentFrame(Frame::Ptr current_frame) {
std::unique_lock<std::mutex> lck(viewer_data_mutex_);
current_frame_ = current_frame;
}
void SetMap(Map::Ptr map) { map_ = map; }
6 更新地图
void Viewer::UpdateMap() {
std::unique_lock<std::mutex> lck(viewer_data_mutex_);
assert(map_ != nullptr);
active_keyframes_ = map_->GetActiveKeyFrames();
// 这样可以显示所有地图点,同时也能够看出没有回环检测,累计误差很大
// active_landmarks_ = map_->GetActiveMapPoints();
active_landmarks_ = map_->GetAllMapPoints(); // 改为all mappoints,显示整体地图
map_updated_ = true;
}
7 关闭线程
void Viewer::Close() {
viewer_running_ = false;
viewer_thread_.join();
}
(8)config 配置类
使用SetParameterFile确定配置文件
bool Config::SetParameterFile(const std::string &filename) {
if (config_ == nullptr)
config_ = std::shared_ptr<Config>(new Config);
config_->file_ = cv::FileStorage(filename.c_str(), cv::FileStorage::READ);
if (config_->file_.isOpened() == false) {
LOG(ERROR) << "parameter file " << filename << " does not exist.";
config_->file_.release();
return false;
}
return true;
}

















 238
238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









