







目录
1. 时间同步的应用场景
考虑自动驾驶/ADAS领域,这类控制器,一般包含各类的传感器,如ODO,GPS,地图,摄像头,毫米波雷达,超声波雷达等,因此这些传感器数据精确的采集时间显得尤为重要,因为直接关系到最后做传感器融合以及决策规划,因此必须保证精确使用哪一个时刻的数据。
2.IEEE1588 时间同步协议的理解
车载里面,常用的时间同步协议是 IEEE 1588 即所谓的PTP( precise time protocol,精确时间协议),下面就针对PTP进行详细解释说明。
IEEE 1588 是精确时间同步协议,精度可以达到微秒级,以下针对其时间同步原理说明。
2.1 请求应答机制同步原理 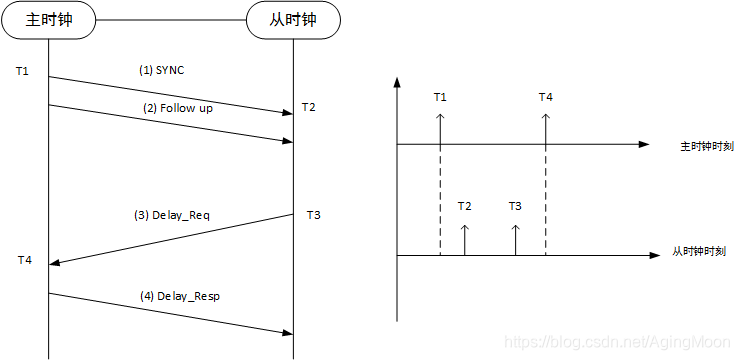
如图所示,包含主时钟和从时钟,主时钟是发送时钟的节点,所有节点和它对比,进行时间同步。
主要过程分为四步:
(1)Sync,主时钟发出 sync 报文,并记录下 sync 报文离开主时钟的精确发送时间 T1;
(2)Follow_up,主时钟将精确发送时间 T1 封装到 Follow_up 报文中,发送给从时钟;
(3)Delay_Req,从时钟向主时钟,发送Delay_Req报文,用于方向传输延时计算,并记录发送时刻T3,主时钟收到该报文后,记录接收时刻T4;
(4)Delay_Resp,主时钟收到Delay_Req后,回复一个Delay_Resp的报文,将T4告诉从时钟。
从第二张图,我们可以清晰的看到,从时钟已经精确知道T1 ,T2,T3,T4四个时刻。
主-->从,发送传输延时 T2-T1;
从-->主,发送传输延时 T4-T3;
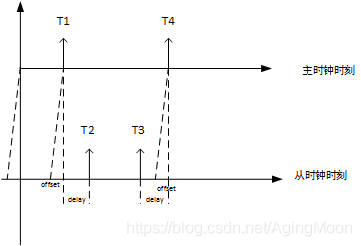
但是以上的计算是基于主时钟和从时钟同步的场景,真实情况是主时钟和从时钟存在偏差,我们假设这个偏差为offset,即 T主-T从 = offset。
在网络中,一般主-->从ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3278
3278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









