






斯图尔特机器人Stewart平台 并联机构仿真 逆向运动学 simulink simscape
①首先在Solidworks中设计并导入 Matlab Simscape Multibody;
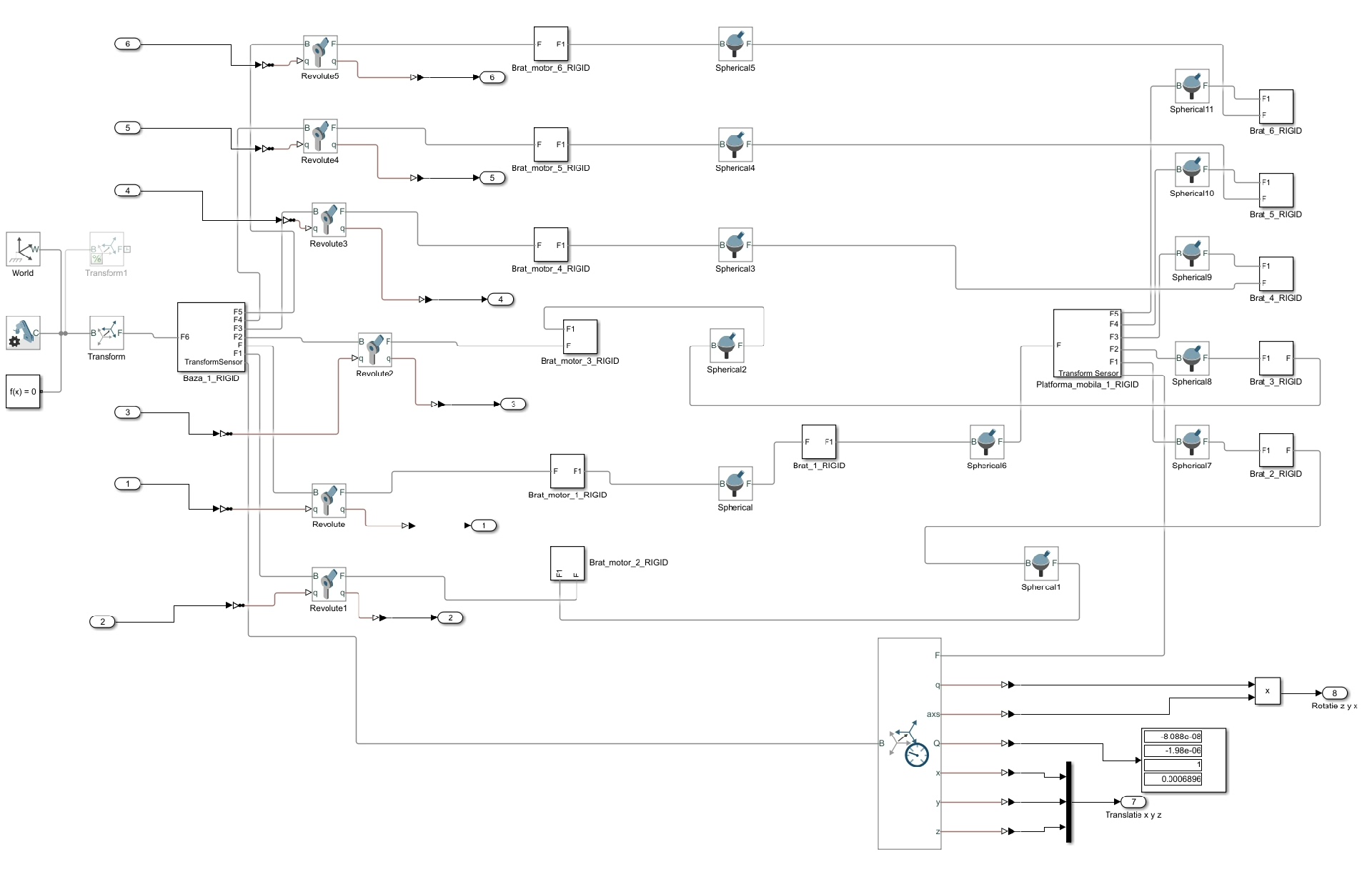
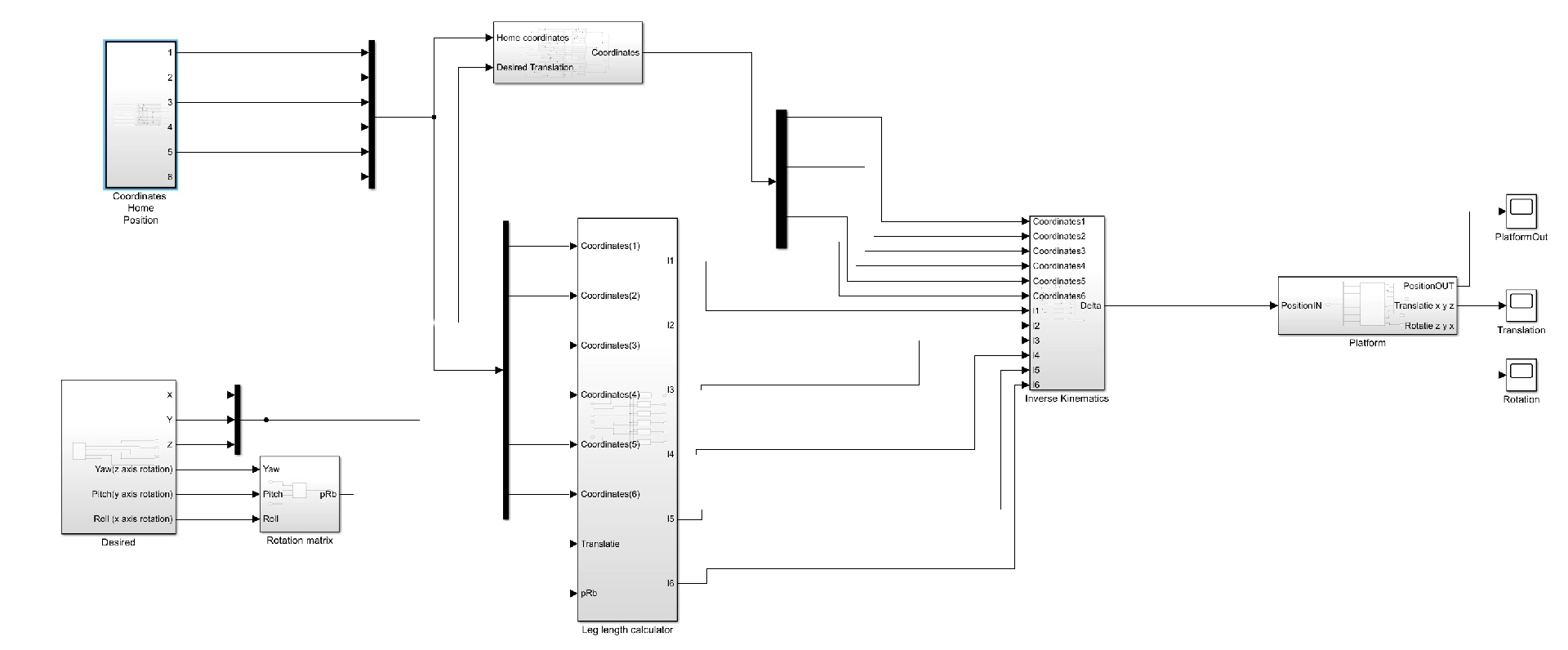
②设计控制算法并在Simscape进行验证;
③附带嵌入式代码:采用Arduino Uno、6 个步进电机和 3 个电感传感器完成。
Simscape Multibody 模拟 6 个基本运动:X 轴平移、Y 轴平移、Z 轴平移、Z 轴旋转、Y 轴旋转、X 轴旋转。
ID:9719755327808117
在无尽黄昏中消失的你
相关的代码,程序地址如下:http://lanzoup.cn/755327808117.html
















 821
821











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









