






MATLAB仿真Gough-Stewart并联机器人斯图尔特6自由度并联机器人逆运动学仿真 动力学控制pid控制
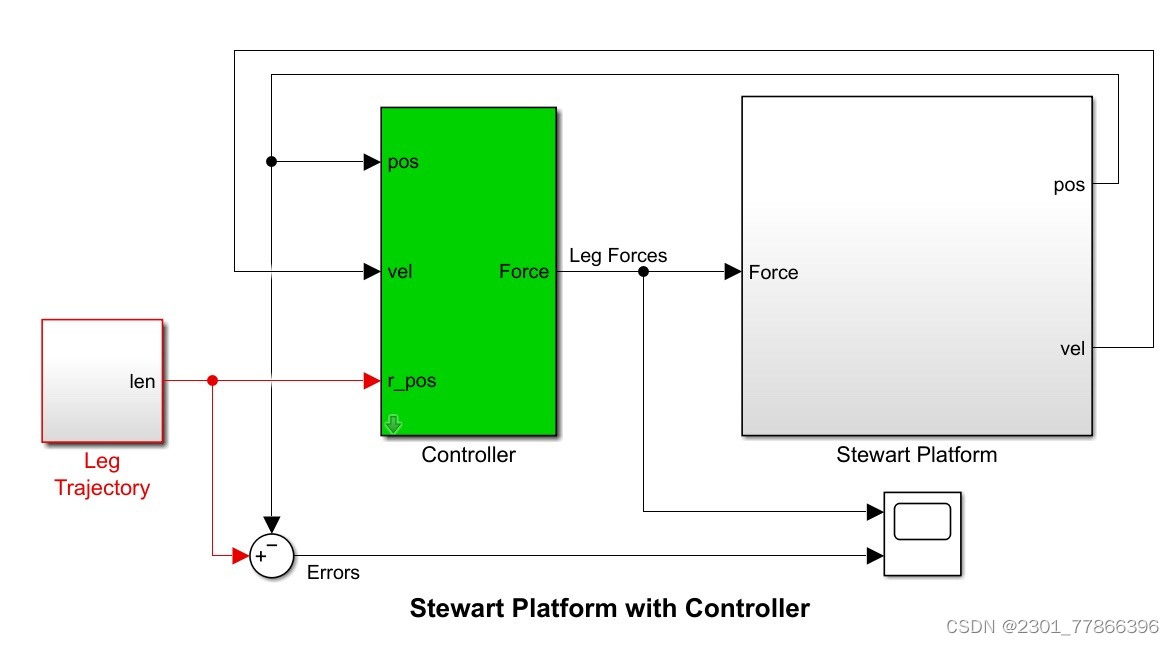
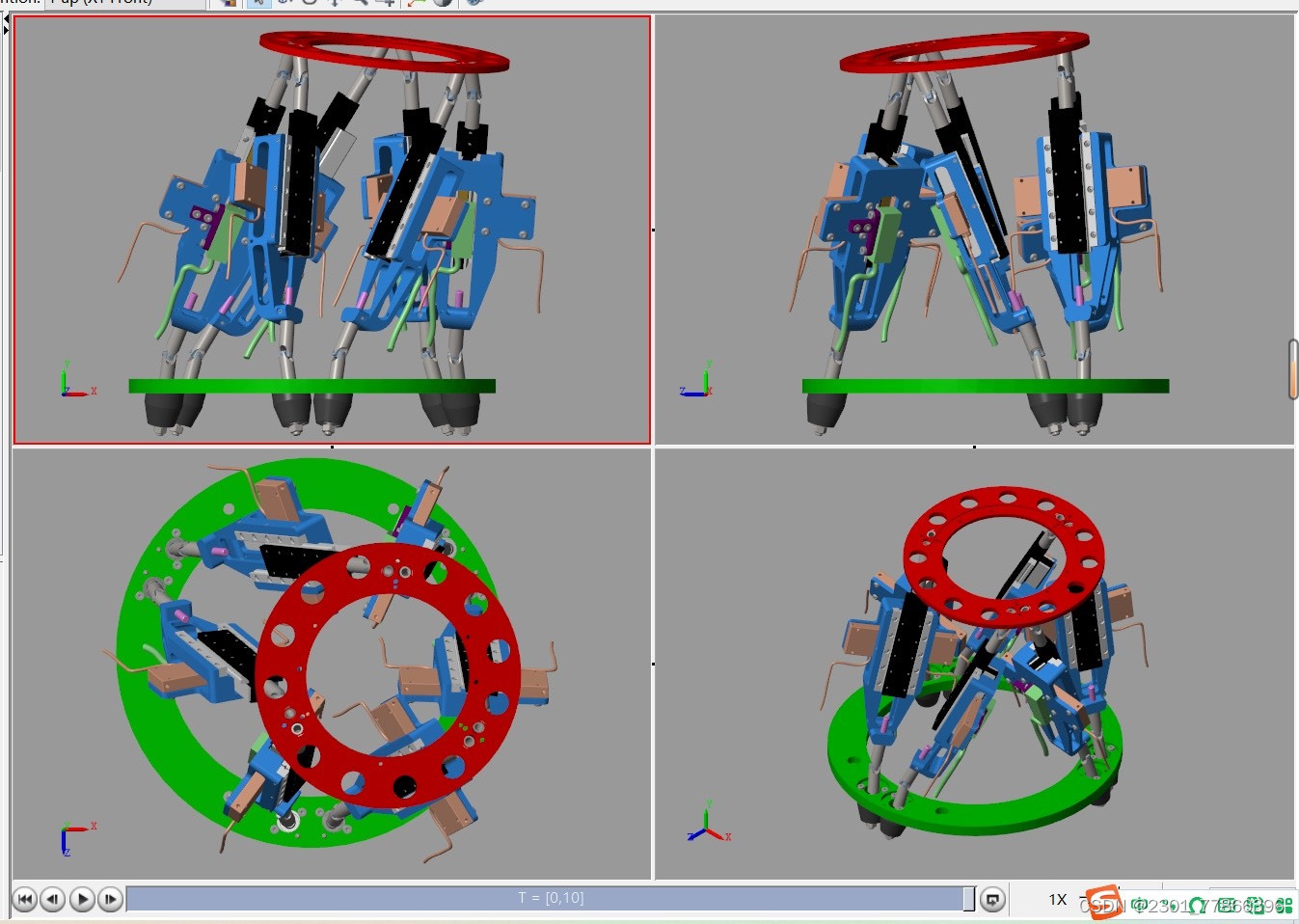
1.搭建了六自由度Stewart并联机器人simulink simscape仿真模型
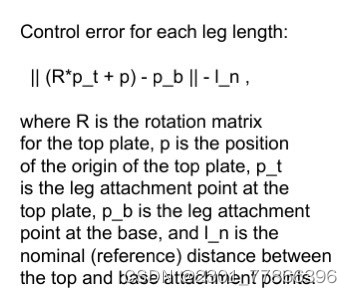
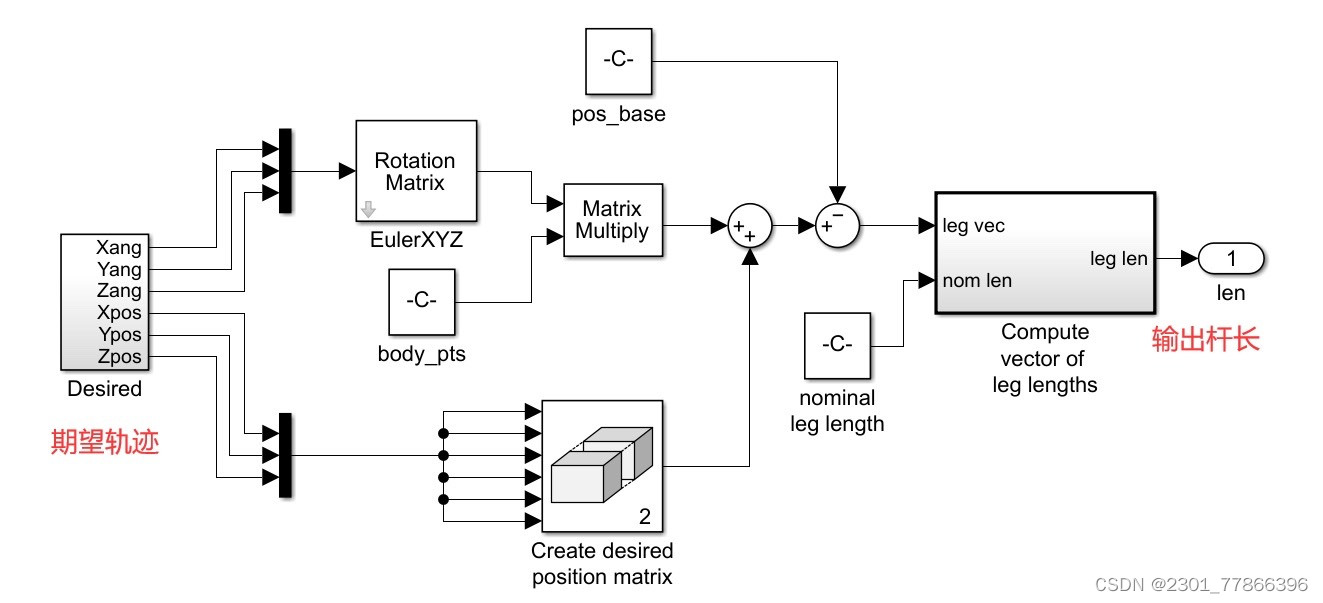
2.建立了逆向运动学仿真 输入位置和姿态求解各个杆长
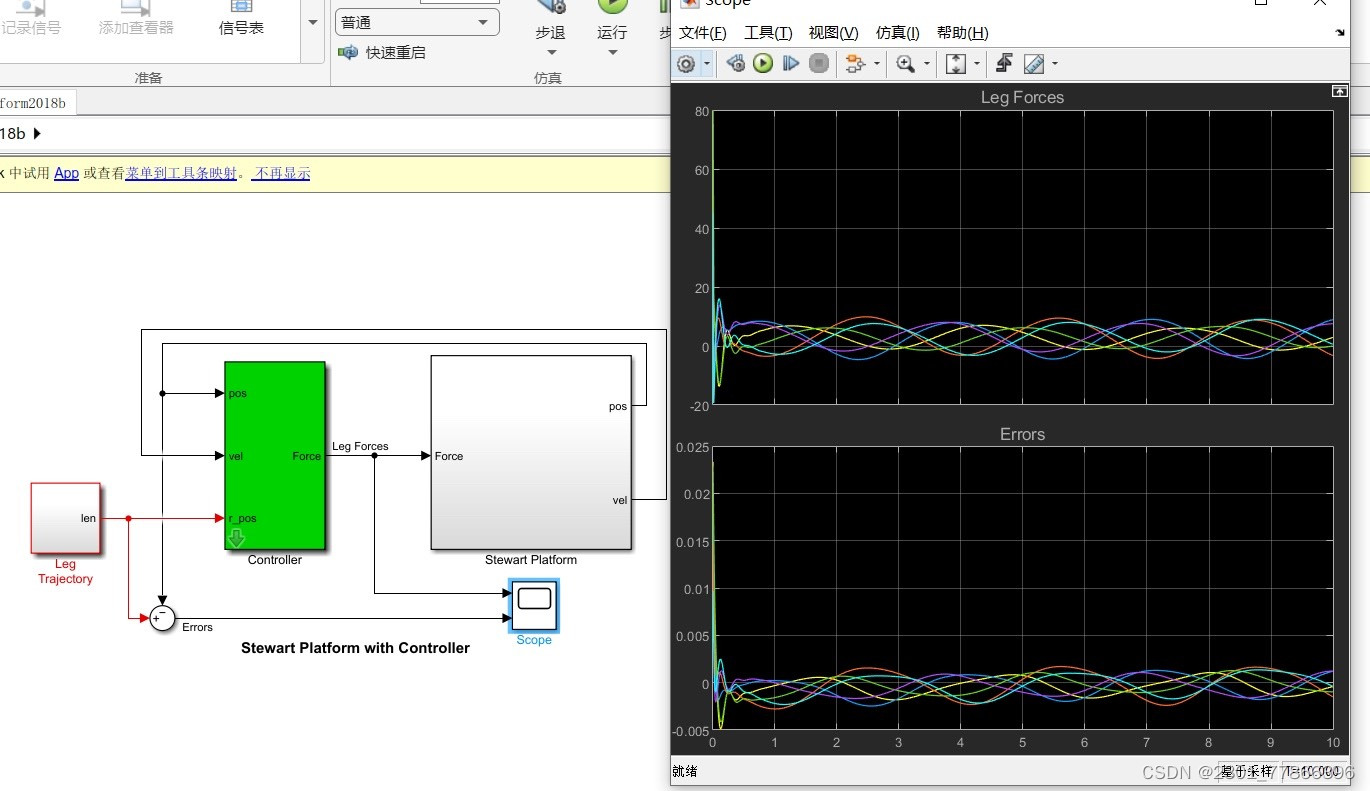
3.运用pid控制器进行动力学跟踪控制
ID:1324693562549681
MATLAB仿真Gough-Stewart并联机器人斯图尔特6自由度并联机器人逆运动学仿真 动力学控制pid控制
1.搭建了六自由度Stewart并联机器人simulink simscape仿真模型
2.建立了逆向运动学仿真 输入位置和姿态求解各个杆长
3.运用pid控制器进行动力学跟踪控制
ID:1324693562549681











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 4949
4949





