







这个图反映了向量空间向李代数的映射,在SO(3)中,向量空间中的向量τ∈R3,这里我们用绕单位轴旋转的方法来表征这一向量而非rpy角,那么我们需要4个值 ωhat=(ω1 ω2 ω3)与θ,由于其满足ω12+ω22+ω32=1,所以我们只需要知道其中两个值即可,再加上旋转角θ,这一表示方法的维度实际上还是3,可令τ=ωhatθ作为向量空间的向量构成。
对于一个三维空间中的旋转可表示为下图所示,

p(0)绕ωhat旋转θ角,角速度为1rad/s,旋转过程中某一时刻下向量p速度满足下列微分方程,
要将其用一般的矩阵乘法表示,则需要将叉乘部分替换,用反对称算子对ωhat进行处理,
则原式可化为

此一阶微分方程的解为
由于旋转角速度为1rad/s,可直接用θ替换t,有
将指数部分泰勒展开得
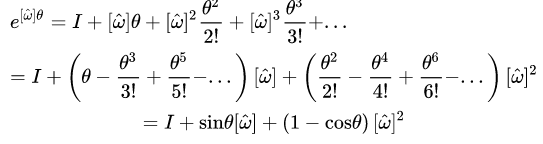
我们将ωhatθ作为向量,[ωhat]θ作为李代数,e[ωhat]θ作为李群(旋转矩阵,)如此我们便得到了切空间中向量ωhatθ向李代数[ωhat]θ、李代数[ωhat]θ向流形空间(即旋转矩阵)的映射关系,[ωhat]θ∈so(3),e[ωhat]θ∈SO(3)。
参考
https://blog.csdn.net/lewif/article/details/105110669















 5745
5745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









