






ADAS
ADAS范围是对车辆前方环境的一种预测树视图,它被描述为不同路径的集合和周围的数字导航地图数据。预测树是由多条路径连接而成,每条路径都代表道路的一部分,并通过交叉点(交叉口)和其他路径连接起来。一旦车辆移动并更改其位置,预测视图也会更改:可能会删除一些经过的路径,或者增加一些新的路径。在自动驾驶系统控制过程中,应用高精地图比较广泛的场景包含如下一些:
其一,高精地图需要告知自动驾驶系统当前车辆处于何种位置,该位置下周边环境怎样?
其二,高精地图需要结合驾驶员设置的导航信息,告知自动驾驶系统从当前时刻开始,下一步车辆应该从道路的何种路径行驶通过。
a)节点PathNode及路径朝向HeadingAngle:
道路分支节点,可用于表达场景网络拓扑下的路径关系,他可以区分自动驾驶系统控制下的各条行驶路径间的关系,其相关的信息包括分支点相对于当前道路位置的偏移量NodeOffset、子路径编号SubpathID、分岔路与主路间的夹角α/β。该夹角从右向左分别从0°增加到360°,其中α=180°时,表示沿着当前方向没有分支点,当α=180°时,表示该子路径与自车行驶路径相反。
b)路径ID:
如下图罗列出当前车辆可以通过的可行使路线。实际上,在高精地图进行路径规划中会包括驾驶路线及所有可能的路线,每条路径分配有相应的编号即PathID,该编号根据是否存在分支节点会随时生成相应的主路径与子路径,其中主路径MainID是指车辆当前行驶位置到分支节点间的行驶路径,子路径SubID是指在节点后的分叉路径。行驶过程中是通过不断地寻找在各个节点处相同地路径编号PathId,作为规划下一时刻的行驶过程。如下图所示,以前述路径交叉节点为分界点,可以描绘出不同的行驶路径,并为各个路径进行编号。如下图表示了4条不同的路径。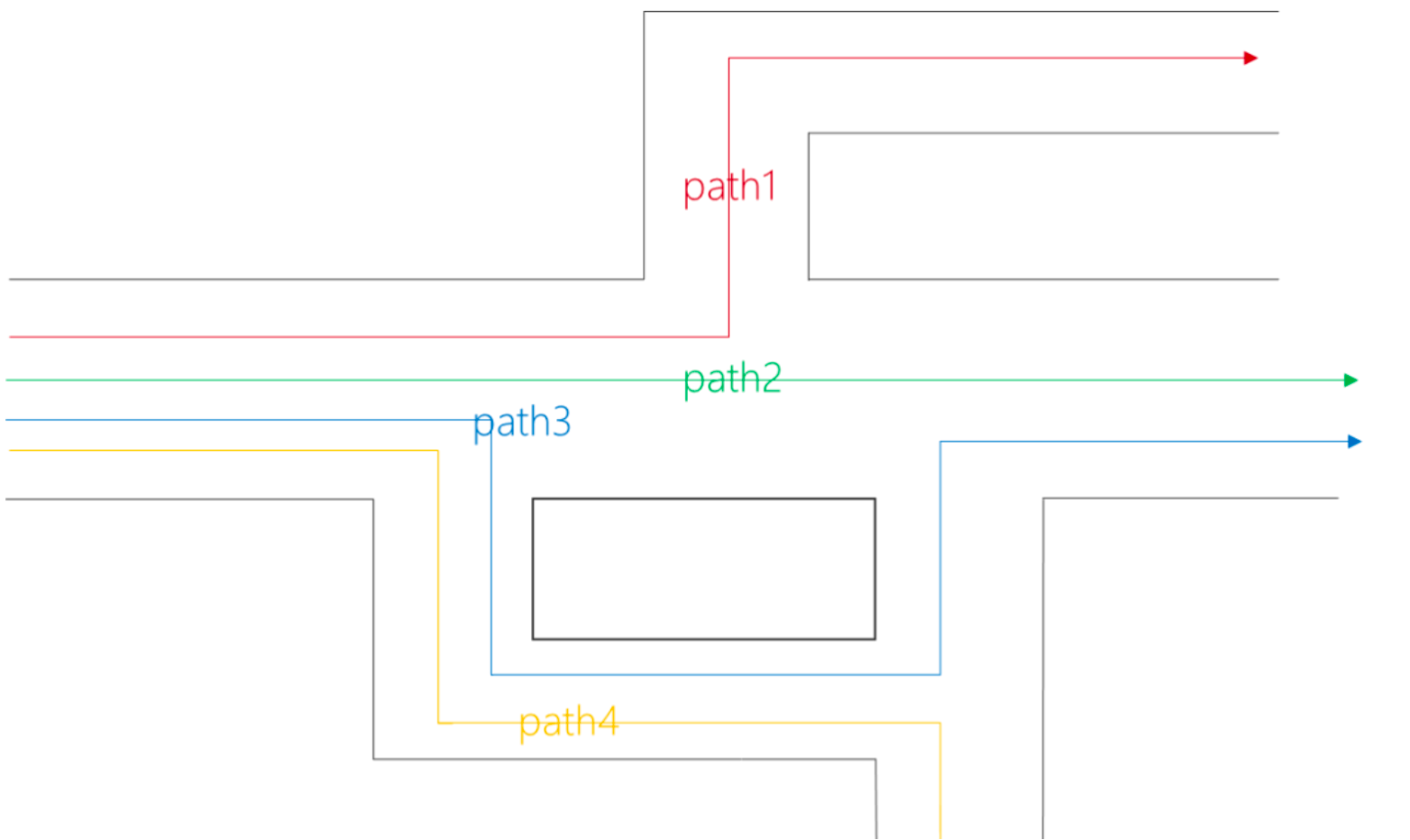
c)偏移量NodeOffset:
偏移量具体是指自车当前位置距离前方关键点的距离,这里的距离是一个相对量,而计算该距离的过程是两个绝对值相减的过程,如下图表示了当前车辆位置(这里称作坐标原点)与关键点的偏移量表达,其中针对交叉节点分割的两条路径,分别计算不同的路径偏移,如果是非主路上的路径偏移则需要计算两个部分偏移进行叠加,一部分是岔路点到车辆当前位置的偏移距离offet1,一部分是岔路点到子路径关键点的路径偏移offset2;总体偏移量为以上两者的总和:即offset_path2=offset1+offset2;
高精地图实际时针对当前位置实时动态的向前播发一定距离的地图数据,实际数据播发过程以车道模型为基本单元,在车道模型属性中的车道数量、车道线、车道类型变化的地方设置断点,一般设置断点间的距离为100-600米左右,由此需要保证车辆前方有至少2km左右的数据,如果有岔路出现,则对该岔路标识的子路径播发500-1km左右的距离。
此外,为了节省内存空间,需要对无用数据占用的缓存空间进行定时清理,删除车辆后方(或称拖尾)的一些无用地图数据,删除过程一般采用限定拖尾范围距离的方式进行,即自车的行驶距离超过该拖尾范围距离时,执行删除指令。这里要注意的是,需要确保删除的拖尾不能是当前车辆正在通过的行驶路径。
d)车道模型LaneModel
在现实世界中,至少要有一条车道来描述一条路。车道通常是道路上的一个横向分隔区域,供车辆朝一个方向行驶。每个路段都可以通过车道数和行驶方向来描述。在水平面上传输的所有车道组可以包括所有可想象的车道类型。从一段路到另一段路,特别是在十字路口,车道相互连接。
每条车道都有属性和几何描述,车道模型概要文件包含描述特定路径上的车道的信息。对于每个车道,它包括关于车道号、方向、过渡和车道类型的信息,以及描述车道边界的两个线性对象标识符。一般的,车道模型包含不同的类型,如普通车道、应急车道、公交车道、超车道、加速车道、非机动车道等。
车道的方向和连接描述了道路的逻辑视图,再次呈现出地平线路径的一部分。识别车道的方法是在驾驶方向上从右到左从1开始计数,包括肩道(如果要表示肩道)。作为高精数据的车道模型是按照一定规则打断后播发的基础单元,包含了车道类型、编号、转化关系等信息。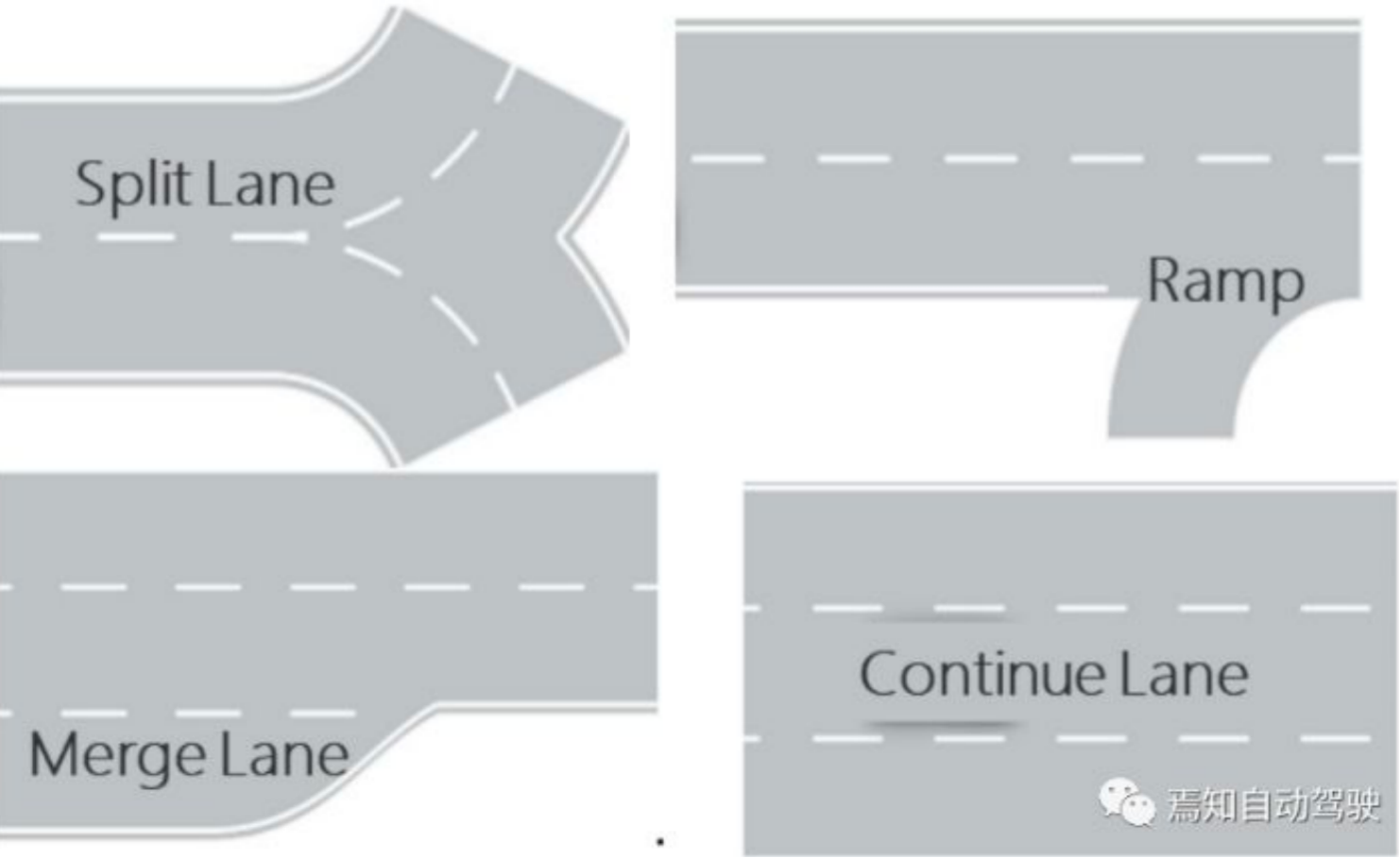
e)车道连接属性Lane Connectivity
车道连接属性表示了一个车道模型到下一个车道模型之间的车道连接关系。他可以对不同车道之间建立有效的连接关系,也可以对同一车道内的有效车道与无效车道之间建立分隔关系。首先通过对车道路径按照一定的距离进行打点分割,将分割的两段车道线进行编号排序,排好序的车道属性作为车道行驶路径连接的规划点表达(车道编号:LaneNumber,车道所在路径编号:PathID)。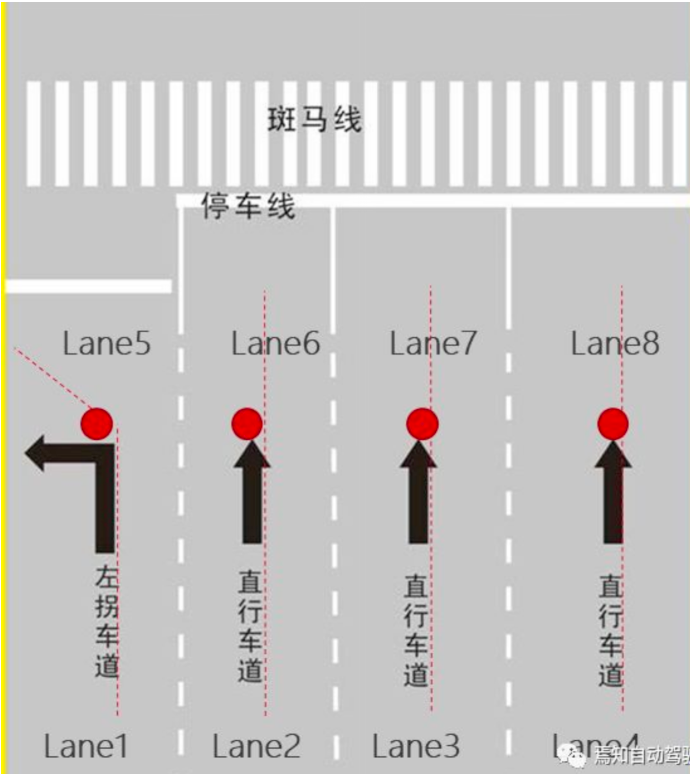
f)导航路径规划 Navigation Path Planning
导航路径规划实际是高精地图接收导航地图发送的驾驶员设置目的地信息进行路径规划的过程,它包含对当前车辆位置的探测,车辆下一时刻形式位置的预测,并对该预测出的路径打上标签发送标志信号给自动驾驶中央控制器以进行相应的车辆轨迹规划。
当前车辆定位完成后,分别生成了两段可行使路径,随后在设置了导航路径后,分别为该两段路径打上标签,当某段路径属性与当前位置路段属性一致时,则将两端同一属性的路径标实为下一时刻需要行驶的路径。如下图,表示了当前车辆位置处路段属性为Path_1_Label=1,下一时刻两条不同路径的属性标签分别为Path_2_Label=0,Path_3_Label=1,Path_4_Label=0,此时Path_1_Label=Path_3_Label,则表示车辆需要沿着Path_3进入岔路口。
这里需要注意的是,导航数据播发是通过从检测到前方特殊特殊路径开始生成。比如前方一定距离PreDis后有匝道,则从该时刻开始进行路径预测。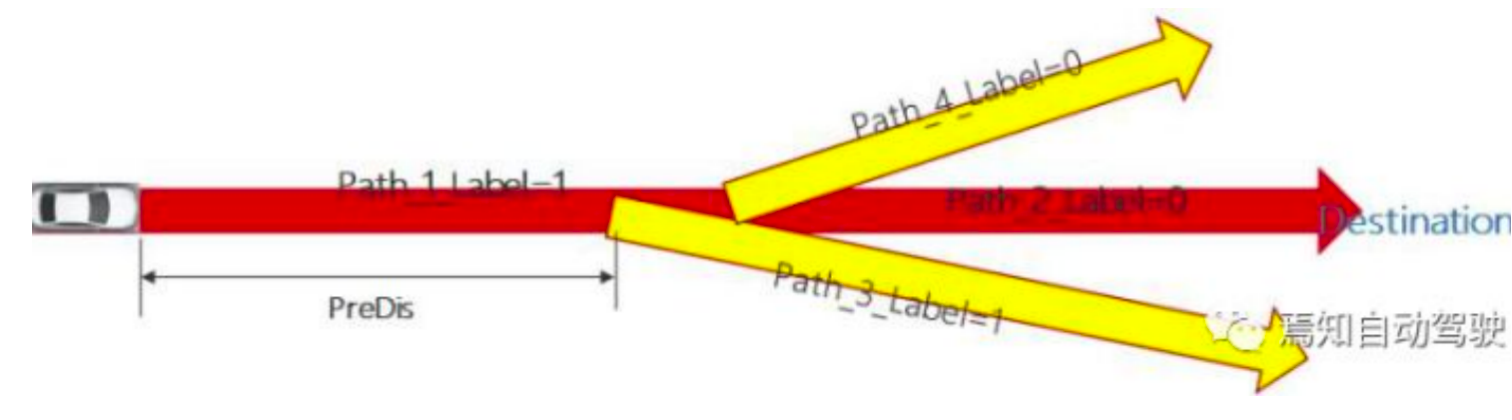
如上路径轨迹预测播发过程如下:
i.导航地图根据人的指令(如目标POI点)规划出全局行驶路线(道路级);
ii.然后将规划的“行驶路线”给到高精地图;
iii.高精地图基于“行驶路线”计算出“车道级路径规划”;
iv.再将“车道级路径规划”给到自动驾驶控制器辅助决策局部路径规划;
g)车道信息Lane Information
车道信息包含了基本车道信息及车道几何信息。
基本车道信息包括了车道编号(行车方向从右向左,编号递增)、车道置信度(包含高、中、低等多类别)、车道类型(车道线、中心线、篱笆、护栏、墙等)、车道颜色(白、黄、橙、蓝、绿、灰、左白右黄、左黄右白等)、车道线型(单实线、单虚线、短虚线、双实线、双虚线、左实右虚、右实左虚、导流线等)等要素。
车道几何信息包括了车道线编号、车道边界坐标、车道中心线坐标、车道曲率、车道纵坡度、车道横坡度、车道航向。
自动驾驶地理围栏设置
地理围栏(ODD)是高精地图针对自动驾驶功能设置的电子围栏,用于限定自动驾驶车辆在该范围内的激活控制前提条件,当车辆处于地理围栏内时可以确认开启自动驾驶功能,当车辆处于地理围栏外时,自动驾驶功能退出或禁止开启或触发相应的报警功能。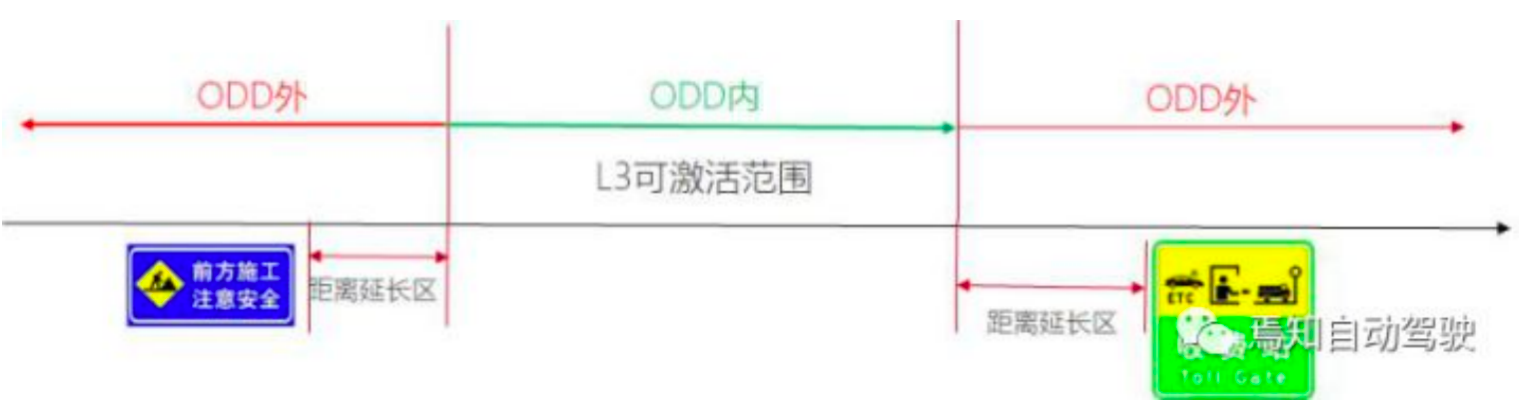
一般情况下能够利用高精地图设置的地理围栏规则如下,地理围栏包括两个部分,其一是特殊场景标识的禁行区,地理围栏外的特殊场景设置包括道路等级、道路构成、收费站、检查站、收费站、检查站、施工/禁行/被借用、交通灯、曲率、横坡、纵坡等。如上图中表示出了比较典型的驶出地理围栏的标识。其二是禁行区外的距离延长区,该区域内是对地理围栏的确认判断区,可作为自动驾驶的报警区。
定位
RTK
RTK——“地面上的卫星定位系统”。RTK技术指实时动态载波相位差分技术, 通过地面基准站与流动站之间的观测误差,实现分米乃至厘米级的高精度定位。卫星定位的误差难以避免,而地面上某些固定点位的绝对位置坐标是可以相对精确给定的——例如特定的地理坐标点、卫星接收站等,以该点位为中心的20-40km半径范围内,对流层、电离层等环境干扰对卫星信号的干扰方向和程度基本一致。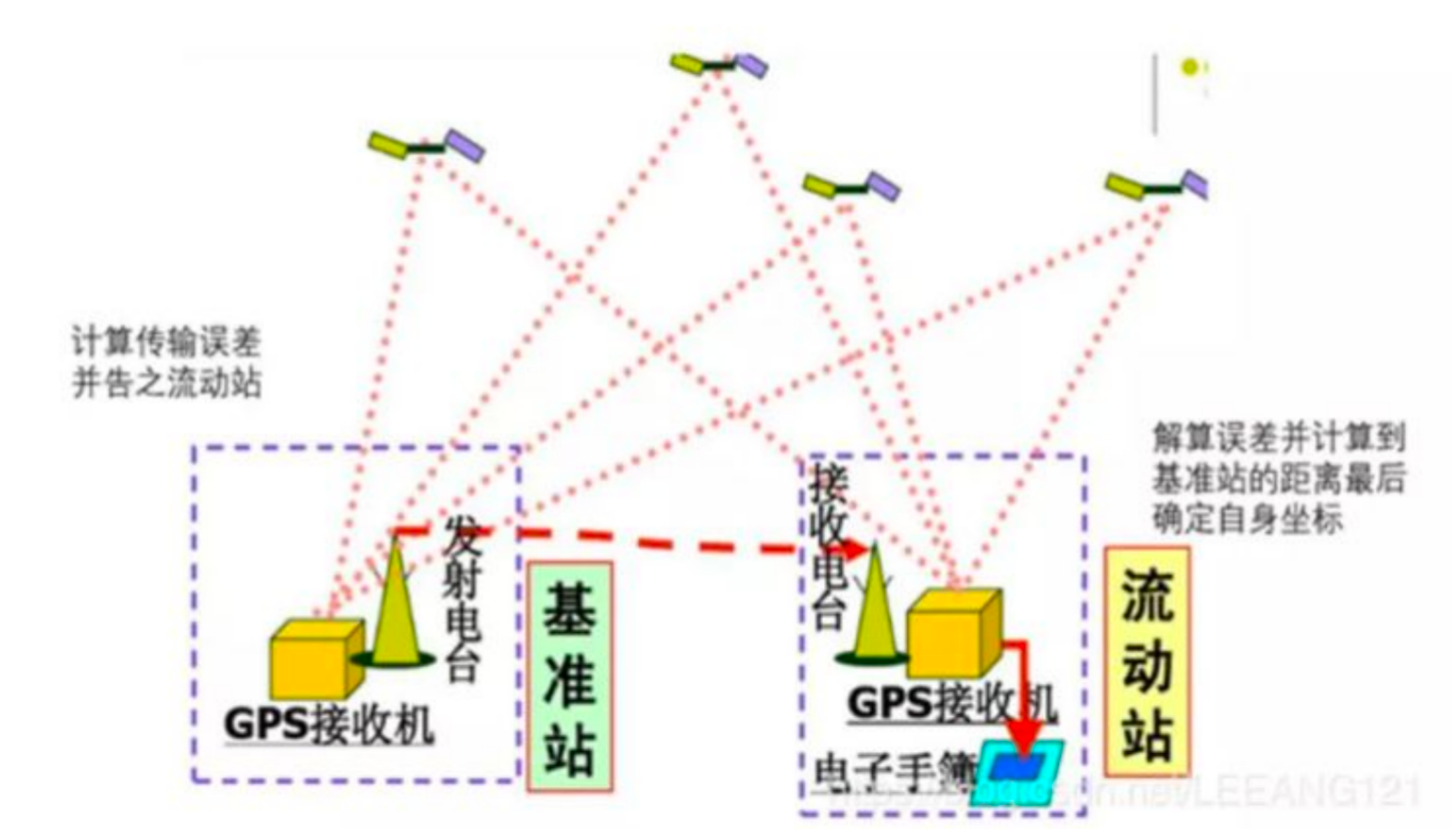
因此这类点位作为RTK中的“基准站”,协助附近的运动物体一一“流动站”矫正卫星定位的结果。简要流程如下:
- 基准站将卫星定位结果与已有精确坐标比对,计算出此时该区域的卫星定位的综合误差。
- 基准站将该误差数据发送给附近的流动终端。
- 流动站收到误差数据,矫正自身卫星定位结果, 实现厘米至亚米量级定位精度。
简单点理解,就是增加了一些基站,类似移动4G这样的基站,这个基站是专门用来做高精度辅助定位的,此时就需要在车上增加RTK接收的天线,同时这个RTK类似于移动收费一样,用户需缴服务费获得差分修正数据,这笔钱要交给地基增强网运营商。从RTK原理可以看出,除了设备和技术本身,RTK定位精度还取决于基站绝对位置的精度,以及距基准站的距离。RTK的供应商国内第一的就是千寻,全国建立超过2600个地基增强站,这个可以在很多位置可以覆盖高精度定位。是不是看起来非常理想,通过RTK就可以解决高精度定位,还是太年轻,想想RTK的本质还是需要接收到GPS信号,同时结合接收RTK的基站信号,成本这里就不谈了,需要增加接收差分信号接收天线和模块,关键你怎么保障你车子行驶的位置都有GPS和RTK基站信号。首先来看GPS信号接收比较困难,是因为卫星的发射功率并不大,信号到达地面时已经很弱。这种信号强度相当于1.6万公里外一个25瓦的灯泡发出的光。再做个比喻,它比电视机天线所接收到的功率还要低10亿倍,所以在隧道、树木茂密、高楼林立的地方,虽然天空中有7-8颗卫星,但是至少需要接收到4颗卫星及以上才能定位。此时经过信号的反射多路径干扰,隧道的衰减等等,所以在这些天桥、隧道、树木茂密等驾驶环境下GPS搜不到信号也是正常。我们再来看看RTK的一个基站覆盖的范围是20-40KM,而且基站建立的成本也不低,主要在城市道路或者常用的高速道路附近有基站,所以不能完全保证在所有道路上都能定位,碰上GPS信号不好,而且RTK基站也不能覆盖的地方,难道就缴械投降了?不着急,我们还有一种方式定位,IMU惯性导航定位,专门就是用来应对这些场景的。
使用痛点
第一,用户购买终端硬件贵,差分技术及元器件实际上过去是应用测绘行业,硬件成本高。
第二,用户需缴服务费获得差分修正数据,这笔钱要交给地基增强网运营商。
第三,用户需缴通讯流量费用于用户端与增强系统间的数据传输,这笔钱要交给4G运营商。
第四,数据保密问题,地基增强网是双向数据,用户位置数据会被运营方自动无偿获取。
第五,使用范围有限制:只在差分站覆盖范围内,实际上有保障可用信号的范围目前还非常有限。
第六,由于技术复杂,导致维权法律上取证难度大。出现事故后,在卫星网络、地基增强网络、3G/4G运营商、终端设备供应商之间难以鉴别划分责任。
总结下来从车厂还有用户角度出发的最关键痛点是:用户终端硬件贵需缴服务费和通信费:获得差分修正数据使用范围有限制:差分站和通讯网络覆盖范围内
IMU
IMU(惯性策略单元),是组成惯性导航系统的设备单元, 是组成惯性导航系统的设备单元,由陀螺仪、加速计、算法处理单元三部分组成。陀螺仪与加速计分别测量角度、加速度信息。不依靠外界的信息输入,惯性导航系统可以向自动驾驶汽车提供航向、姿态、速度、位置等导航参数, 是高精定位不可或缺的一部分。IMU提供信息的维度称为自由度(DOF) , 三轴(x轴、y轴、z轴) 陀螺仪加三轴加速计, 组成六自由度IMU, 也称六轴IMU。再加上用于测量相对于地球磁场方向的三轴磁强计组成九自由度IMU, 也称九轴IMU。IMU提供的信息与汽车轮速记、方向盘转角等信息有重叠, 为自动驾驶汽车感知方位与姿态提供冗余信息。有点难懂,我们从网上找到比较简单容易理解的方式;当我们晚上回到家,发现家里停电时,眼睛在黑暗中什么都看不见的情况下,只能根据自己的经验,极为谨慎地走小碎步,并不断用手摸周围的东西(比如冰箱),用以确定自己所在的位置。
IMU的原理和黑暗中走小碎步很相似。
在黑暗中,由于自己对步长的估计和实际走的距离存在误差,走的步数越来越多时,自己估计的位置与实际的位置相差会越来越远。就像下图所示。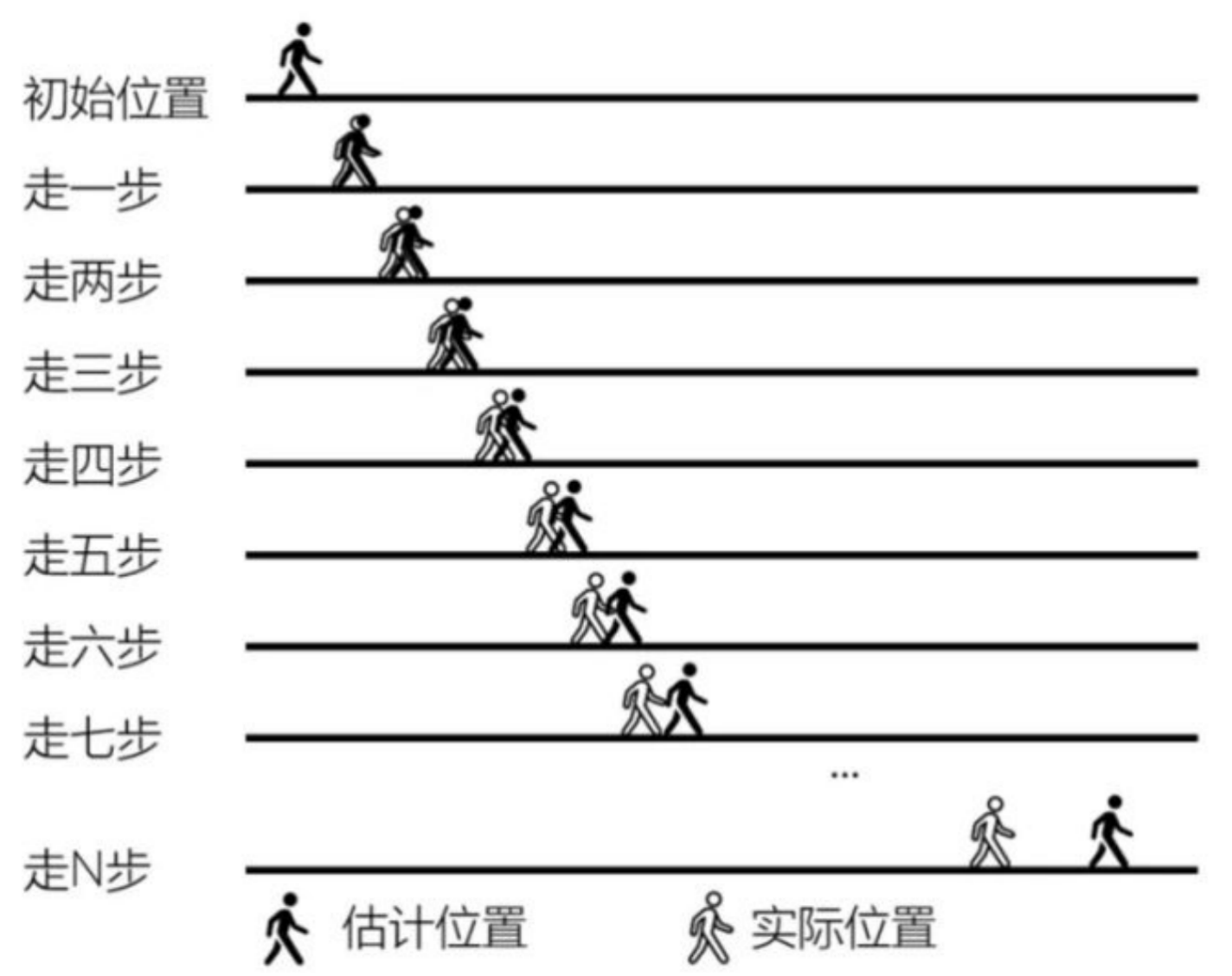
走第一步时,估计位置(黑人所在位置)与实际位置(白人所在位置)还比较接近;但随着步数增多,估计位置与实际位置的差别越来越大。图中的小人只朝一个方向移动,是一维的。根据此方法推广到三维,就是惯性测量单元的原理。
学术上的语言是:以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。所以看到这个惯性导航,实际就是根据牛顿力学,在GPS失去信号的时候,根据当前的位置,前进的速度,方向和角度,自己建立一个坐标系,算出一个预估的位置,输出给导航地图一个经纬度位置,实现自主导航,从图片中也可以看到,这个有一个确定,这个可以短时间使用,如果长时间使用的话,这个位置累积偏移会非常严重。如果要测试一个IMU的自主导航的偏移度怎么样,就应该长时间失去GPS信号的情况下去测试,此时最合适的就是长长的隧道,所以为什么台北的雪山隧道,这么受到车厂的测试爱戴,因为它全长约12.9公里,完全有这么长的时间测试IMU的偏移度。
IMU在自动驾驶汽车高精定位中的作用
协助GPS定位与无外部信号自主导航。IMU在自动驾驶过程中时刻发挥着作用:GPS信号的更新频率为10Hz——也就是每0.1秒更新一次GPS定位信息, 而IMU设备的更新频率在100Hz以上, 在两次GPS信号更新之间, 自动驾驶汽车可以结合IMU提供的车辆方位、姿态、速度等信息推算汽车的精确位置,实现高频率高精度定位,满足自动驾驶汽车对实时定位的要求。
而在无定位信号或弱定位信号区域, 自动驾驶汽车可以通过IMU实现短时间自主导航——这是IMU在自动驾驶高精定位环节发挥的另一重要作用。例如,当自动驾驶汽车驶入隧道、山路等信号较弱路段,或接收电磁波信号、光信号(用于摄像头识别)受到强烈干扰导致设备无法正常工作时,汽车保留最后一次稳定接收到的定位数据, 基于IMU提供的参数信息计算汽车在弱信号路段的具体位置, 结合高精地图数据实现自主导航。但IMU的计算误差会随时间增大, 因此强调是在一定时间范围内的自主导航。
跑在控制器上的软件对信息的处理流程在时间维度上类似下图。在0~100ms的周期中,使用IMU进行9次位置的估计,待新的GPS定位数据进来时,则进行修正,以此实现高频率的定位结果输出。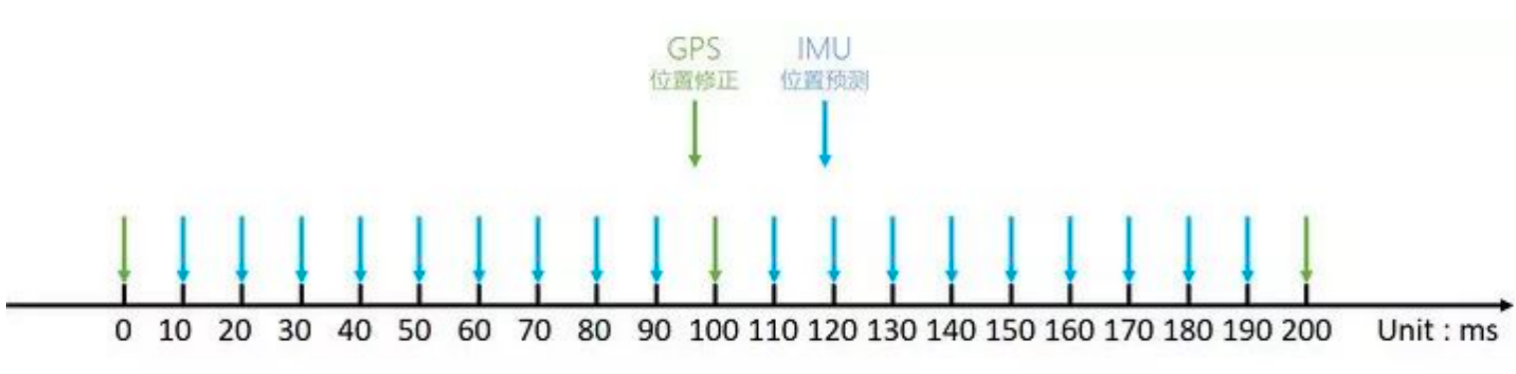
就这样,GPS与IMU便相辅相成地实现了无人车的稳定定位,就能解决我们前面提到的定位刷新频率≥100HZ的问题。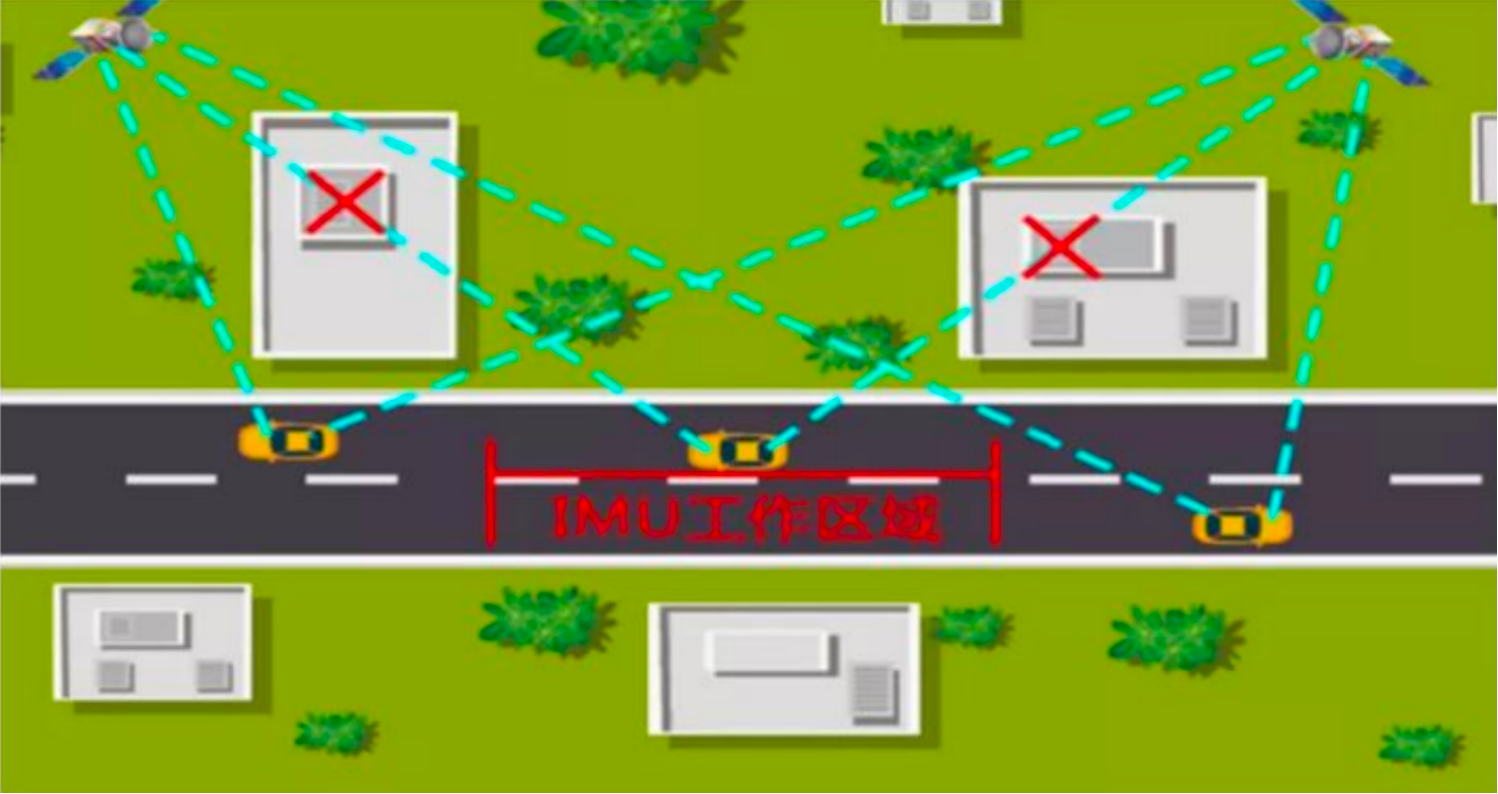
我们看看首先是RTK在GPS信号和基站信号的情况下可以实现2-30cm的高精度定位,而IMU惯性导航,可以弥补GPS定位缺陷,精确感应定位和车身姿态,IMU全天候工作,受外界干扰小,短期精度和稳定性好,数据更新频率高,劣势就是自动驾驶的IMU的成本需要非常高。
融合定位
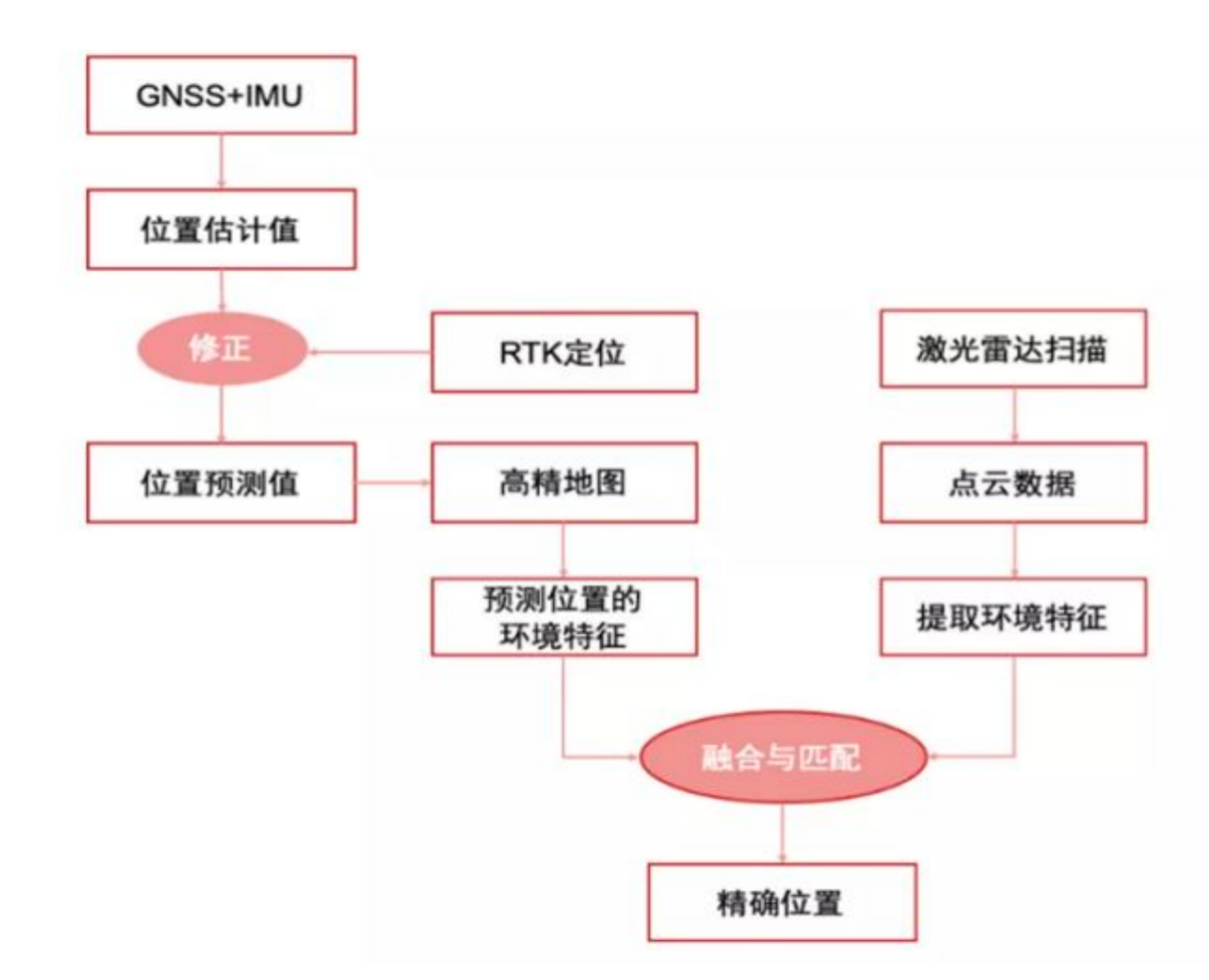
以激光雷达点云匹配的定位方案为例:
一方面,车载激光雷达扫描获得点云数据,并提取数据中包含的环境特征;另一方面,车辆从“ GNSS + RTK + IMU ”定位组合中获得车辆位置的预测值,从高精地图中获取该位里附近的环境特征,之后将扫描识别的环境特征与高精地图记述的环境特征做匹配融合,获取车辆当前场景下精确的位置信息。高精定位方案中,共有三部分相互重盈的定位子系统:
- 卫星定位,包括RTK 定位技术、地基增强网络等;
- 航位推算引擎,包括 IMU 、车身里程计、以及车辆控制系统的总线信息;
- 基于高精地图的相对位置。三部分之间信息相互藕合,结果相互冗余,从而保证定位的精度和可靠性。


















 2256
2256

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











