






无偏置S-R-S构型七自由度冗余机械臂臂角参数化方法
一、引言
随着机器人技术的不断发展,机械臂作为其重要组成部分,其灵活性和精确性成为了研究的重点。在众多构型中,无偏置S-R-S构型七自由度冗余机械臂因其独特的结构和灵活性,被广泛应用于各种复杂任务中。本文将详细介绍该构型机械臂的臂角参数化方法,以求解给定末端位姿和臂角下的最多8组关节角度。
二、无偏置S-R-S构型简介
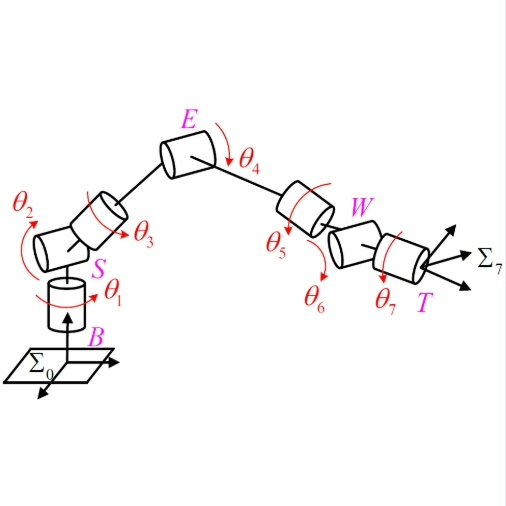
无偏置S-R-S构型是一种常见的机械臂构型,其特点是通过串联的旋转关节(R)和球面副(S)实现末端执行器的位置和姿态调整。这种构型具有较高的灵活性和工作空间,适用于需要高精度和高灵活性的任务。
三、臂角参数化方法
为了求解机械臂在给定末端位姿和臂角下的关节角度,我们需要采用一种有效的臂角参数化方法。该方法主要基于以下步骤:
- 建立机械臂的运动学模型。根据无偏置S-R-S构型的几何特性,建立关节角度与末端位姿之间的数学关系。
- 确定臂角参数。臂角参数包括机械臂的姿态角和位置角,这些参数将直接影响机械臂的关节角度。
- 采用适当的优化算法,如梯度下降法或遗传算法等,对运动学模型进行优化,以求解满足给定位姿和臂角要求的关节角度。
- 根据优化结果,得到最多8组关节角度。这些角度将使机械臂达到指定的末端位姿和臂角。
四、应用场景
无偏置S-R-S构型七自由度冗余机械臂的臂角参数化方法具有广泛的应用场景。例如,在工业生产线上,机械臂需要完成各种复杂的抓取和放置任务,此时可以采用该方法求解最优的关节角度,以提高生产效率和准确性。此外,该方法还可应用于医疗、航空航天等领域,为复杂任务的执行提供有力的支持。
五、购前须知
- 本方法适用于无偏置S-R-S构型的机械臂,前请确认您的机械臂构型是否符合要求。
- 前请仔细阅读产品说明,了解产品的功能和性能。
- 附参考资料提供了更多关于无偏置S-R-S构型七自由度冗余机械臂的详细信息和相关研究,供您参考和学习。
六、结语
无偏置S-R-S构型七自由度冗余机械臂的臂角参数化方法是实现机械臂精确控制的关键技术之一。通过本文的介绍,我们了解了该方法的基本原理和应用场景,希望对您有所帮助。如有任何疑问或需要进一步了解,请随时与我们。
【无偏置S-R-S构型七自由度冗余机械臂臂角参数化方法】
代码主要功能:
基于臂角参数化方法求解机械臂在给定末端位姿和臂角下的最多8组关节角度。
购前须知:
- 适用于无偏置S-R-S构型,附参考资料;


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









