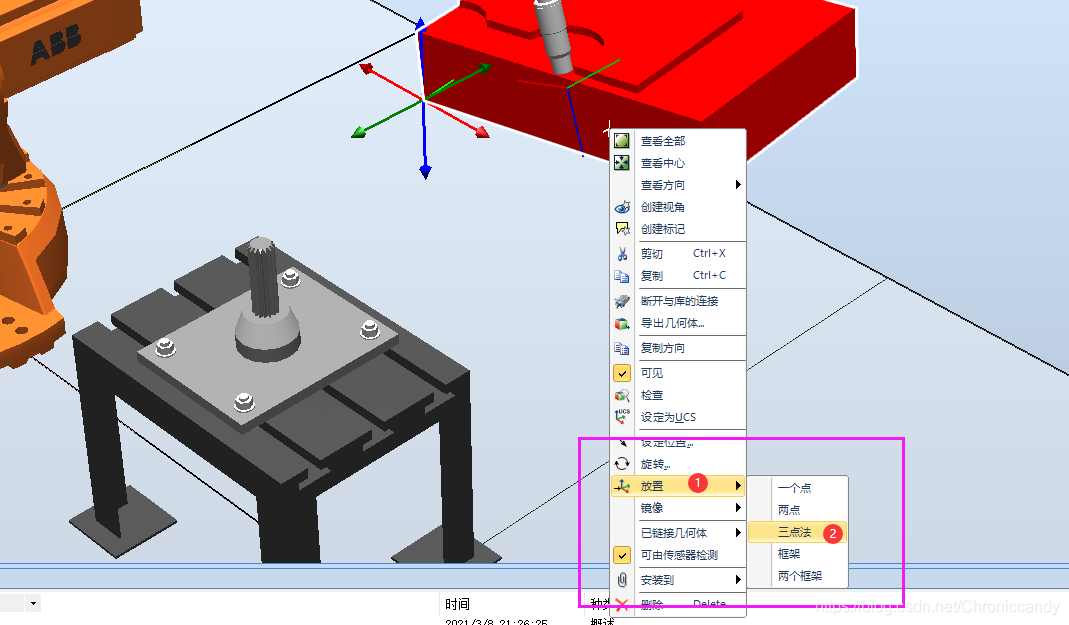
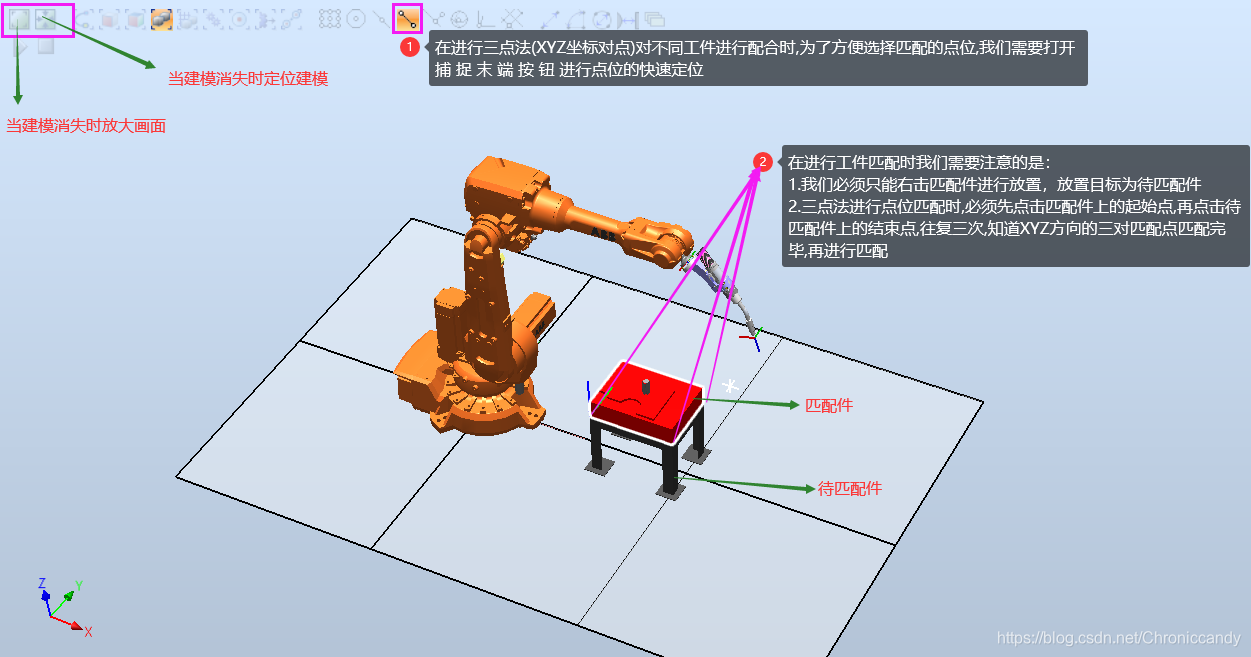
配置机器人的工作环境 安装机器人本体,且将其工作台和工件模块进行配合 🌟注意:在进行工件的放置配合前,必须先将匹配件先安装到待匹配件上(即先让工件安装到一起,如果配置好两个工件之后再进行安装,将出现安装件偏移的情况),如果匹配件未正确安装到待匹配件上,我们再进行放置配合 安装好两个匹配工件后,鼠标右击需要进行配合的工件,选择 放置,放置规则(此案例我们使用三点法进行工件与工作台的配合) 不同工件的配合: 放置配合前: 放置配合完毕: 放置并调整机器人控制柜和周边设施,构建基本的机器人布局 工件的旋转








 本文介绍了如何使用RobotStudio配置机器人工作环境,包括安装机器人本体、工作台和工件模块的配合,以及机器人路径配置和离线编程。详细步骤涵盖了工件的放置配合、旋转与复制,以及机器人系统的创建和目标点的添加。同时,文章还讲解了机器人程序的同步和仿真操作,强调了程序更改后进行同步的重要性。
本文介绍了如何使用RobotStudio配置机器人工作环境,包括安装机器人本体、工作台和工件模块的配合,以及机器人路径配置和离线编程。详细步骤涵盖了工件的放置配合、旋转与复制,以及机器人系统的创建和目标点的添加。同时,文章还讲解了机器人程序的同步和仿真操作,强调了程序更改后进行同步的重要性。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3085
3085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






