







论文:《Accurate Multiple View 3D Reconstruction Using Patch-Based Stereo for Large-Scale Scenes》
该论文是OpenMVS中PatchMatch算法原理的出处,因此仔细阅读了一遍,在此记录一下遇到难点。
这篇博客讲的主要是该论文中的单应矩阵。
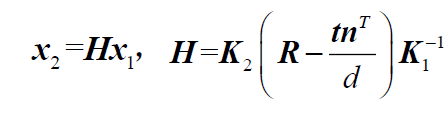
论文是怎么表述单应矩阵的?

(参数比较多,具体的含义请到论文看哈)
稍微解释一下参数:
用Xi和ni描述一个平面:
Xi是世界坐标系中的一个点。
ni 是平面的法向量。
Ri、Rj和Ci、Cj:
分别是 i 帧和 j 帧的旋转矩阵,相机中心在世界坐标系中的位置。
十四讲里面的单应矩阵
平面方程:
n是平面法向量,P是平面上的点(3维)
一开始看着还是挺
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 870
870











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









