






轮趣科技
42步进电机+arduino:WHEELTEC_MS42DDC
接线方式:
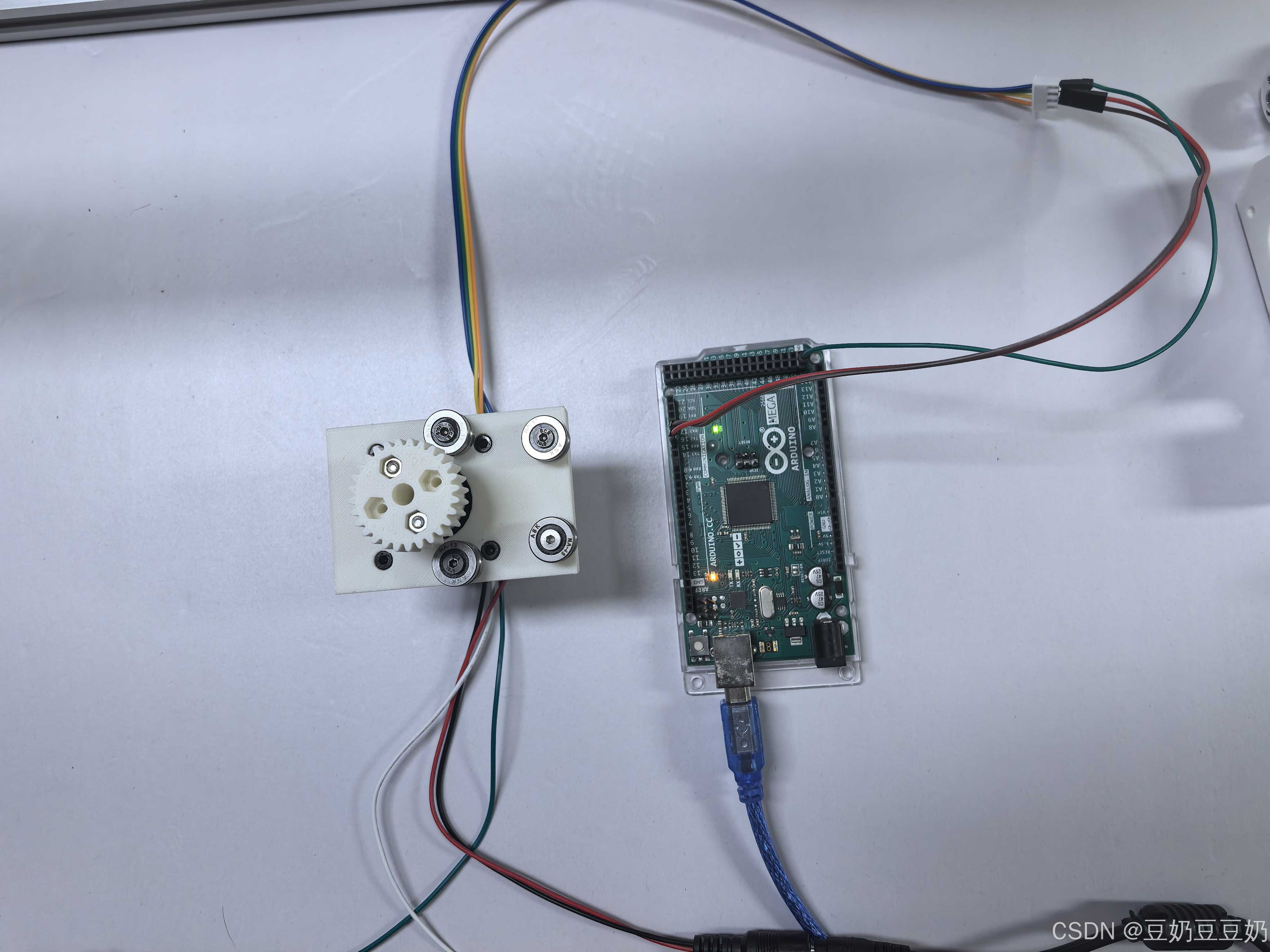 WHEELTEC_MS42DDC有两个接口,
WHEELTEC_MS42DDC有两个接口,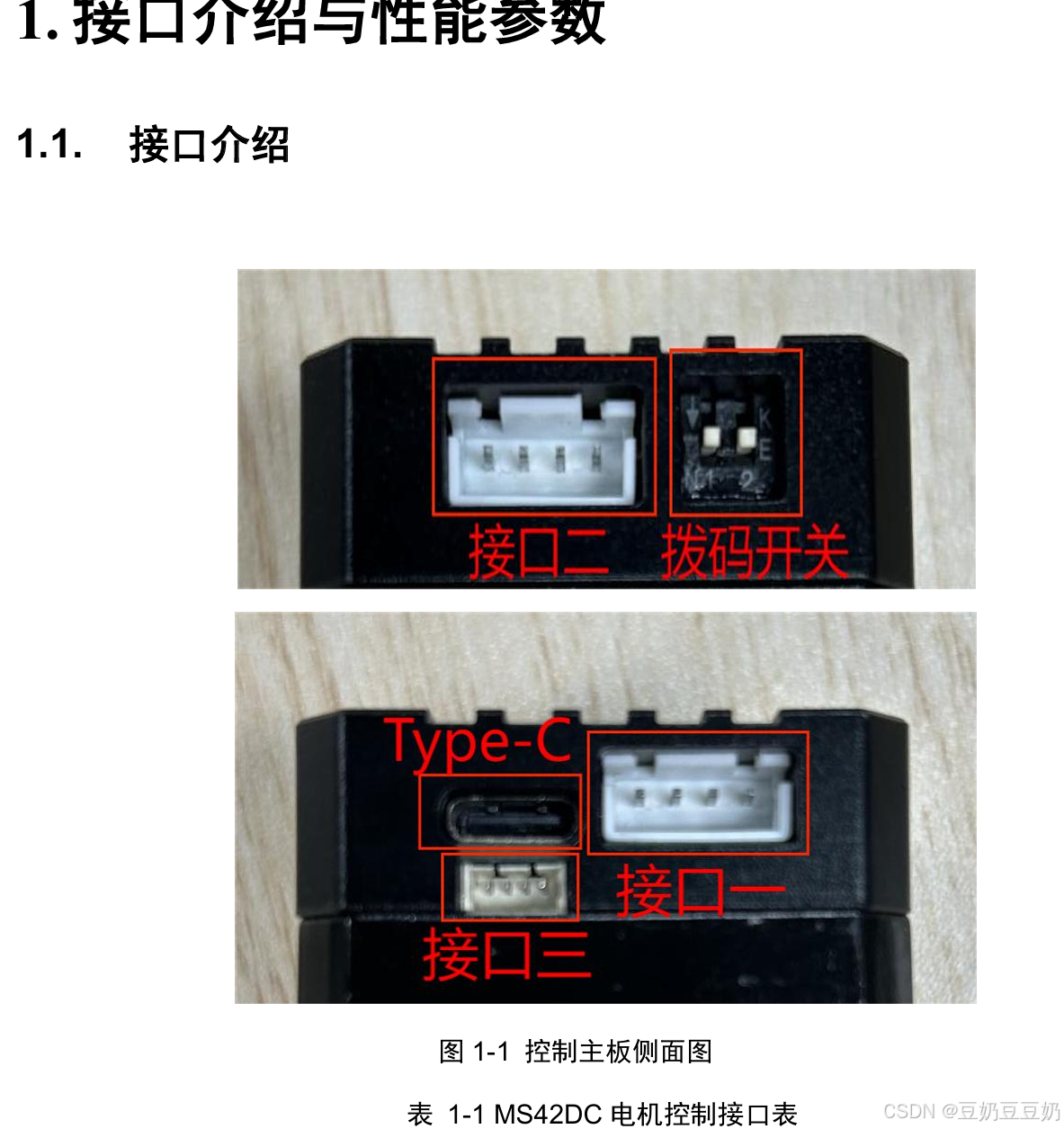
一端接口连接配套的DC电源,另外一端只需要用三根线,一根负极连接ardino 的GND,然后把该端口的tx和rx连接到arduino的rx和tx,下面代码中用的serial2对应arduino mega中的16和17;千万别接错正负极。
代码如下
#include <Arduino.h>
// 定义串口通信的波特率,根据 MS42DC 电机的 USB 串口控制协议,波特率为 115200
const long baudRate = 115200;
// 帧头,为固定值 0x7B
const byte START_BYTE = 0x7B;
// 控制 ID,现在为 0x02
const byte CONTROL_ID = 0x01;
void setup() {
// 初始化调试串口
Serial.begin(115200);
while (!Serial) delay(1);
// 初始化与电机通信的串口
Serial2.begin(baudRate);
Serial.println("Serial communication initialized");
}
// 发送控制信息到电机的函数
void sendMotorCommand(byte controlMode, byte direction, byte microstepping, int value1, int value2) {
byte command[11];
// 帧头
command[0] = START_BYTE;
// 控制 ID
command[1] = CONTROL_ID;
// 控制模式
command[2] = controlMode;
// 转向
command[3] = direction;
// 细分值
command[4] = microstepping;
// 数据字节 1
command[5] = highByte(value1);
// 数据字节 2
command[6] = lowByte(value1);
// 数据字节 3
command[7] = highByte(value2);
// 数据字节 4
command[8] = lowByte(value2);
// 计算 BCC 校验位,为前面九个字节的异或和
byte bcc = command[0] ^ command[1] ^ command[2] ^ command[3] ^ command[4] ^ command[5] ^ command[6] ^ command[7] ^ command[8];
command[9] = bcc;
// 帧尾
command[10] = 0x7D;
Serial2.write(command, 11);
Serial.print("Sent command to motor: ");
for (int i = 0; i < 11; i++) {
Serial.print(command[i], HEX);
Serial.print(" ");
}
Serial.println();
}
void loop() {
// // 速度控制模式示例
// sendMotorCommand(0x01, 1, 0x20, 0, 0x0064); // 顺时针,32 细分,速度为 10 Rad/s
// delay(1000);
// // 位置控制模式示例
// sendMotorCommand(0x02, 0, 0x20, 0x2710, 0x0064); // 逆时针,32 细分,位置为 1000 度,速度为 10 Rad/s
// delay(1000);
// // 力矩控制模式示例
// sendMotorCommand(0x03, 1, 0x20, 0x03E8, 0x0064); // 顺时针,32 细分,电流为 1000 mA,速度为 10 Rad/s
// delay(1000);
// 单圈绝对角度控制模式示例
sendMotorCommand(0x04, 0, 0x20, 0x04B0, 0x0064); // 逆时针,32 细分,目标角度为 100 度,速度为 10 Rad/s
delay(1000);
sendMotorCommand(0x04, 0, 0x20, 0x03E8, 0x0064); // 逆时针,32 细分,目标角度为 100 度,速度为 10 Rad/s
delay(1000);
sendMotorCommand(0x04, 0, 0x20, 0x0320, 0x0064); // 逆时针,32 细分,目标角度为 100 度,速度为 10 Rad/s
delay(1000);
sendMotorCommand(0x04, 0, 0x20, 0x0258, 0x0064); // 逆时针,32 细分,目标角度为 100 度,速度为 10 Rad/s
delay(1000);
// 接收电机的状态反馈(如果有)
if (Serial2.available() > 0) {
byte buffer[32];
int bytesRead = Serial2.readBytes(buffer, Serial2.available());
Serial.print("Received ");
Serial.print(bytesRead);
Serial.println(" bytes from motor:");
for (int i = 0; i < bytesRead; i++) {
Serial.print(buffer[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}

















 1698
1698

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









