






电流环扰动观测器、PI参数自动生成
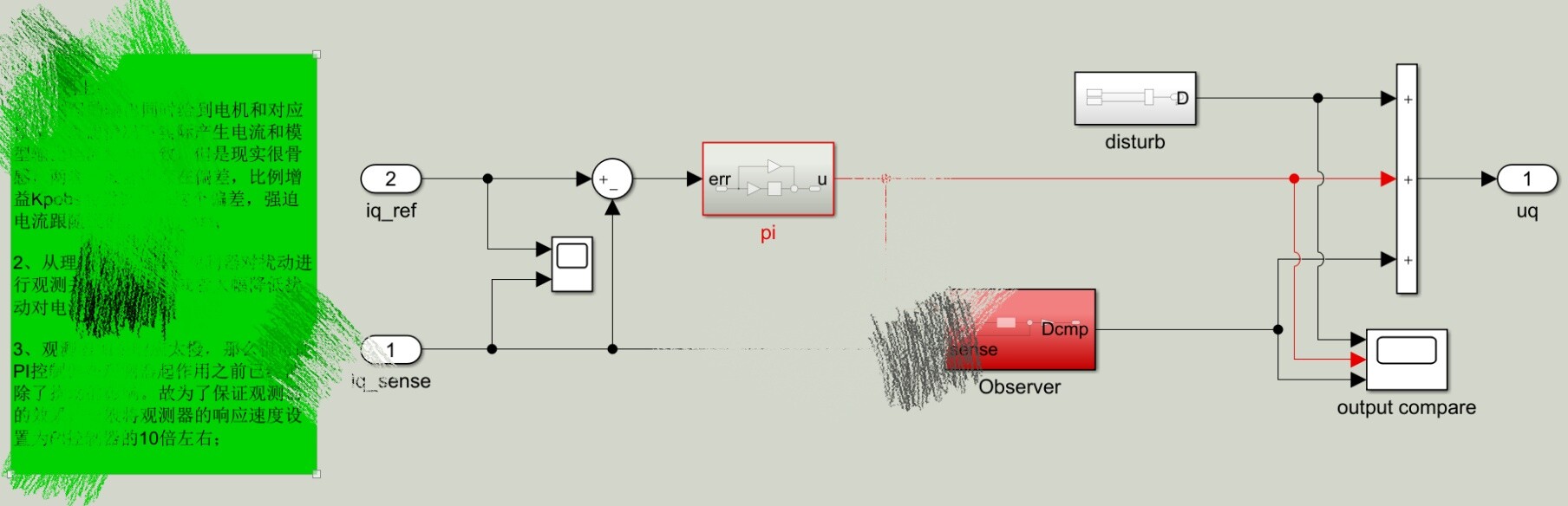
观测器对扰动进行补偿,能有效提高电流环抗扰动能力,并且能对反电势扰动起到很好的作用,效果如图所示…
“钳位式“抗积分wind-up设计;
文档详细介绍了使用规范地使用控制理论设计PI控制器的方法,PI参数由时域指标tr或者ts确定,而不是依赖祖传经验凑试…
ID:32200625826049970
求道电机控制
电流环扰动观测器、PI参数自动生成
摘要:本文详细介绍了电流环扰动观测器的原理和应用,以及利用控制理论设计PI控制器的方法。通过观测器对扰动进行补偿,可以有效提高电流环的抗扰动能力,并对反电势扰动起到很好的作用。此外,本文还提出了一种基于时域指标tr或者ts确定PI参数的方法,避免了依赖祖传经验的试错设计。
一、引言
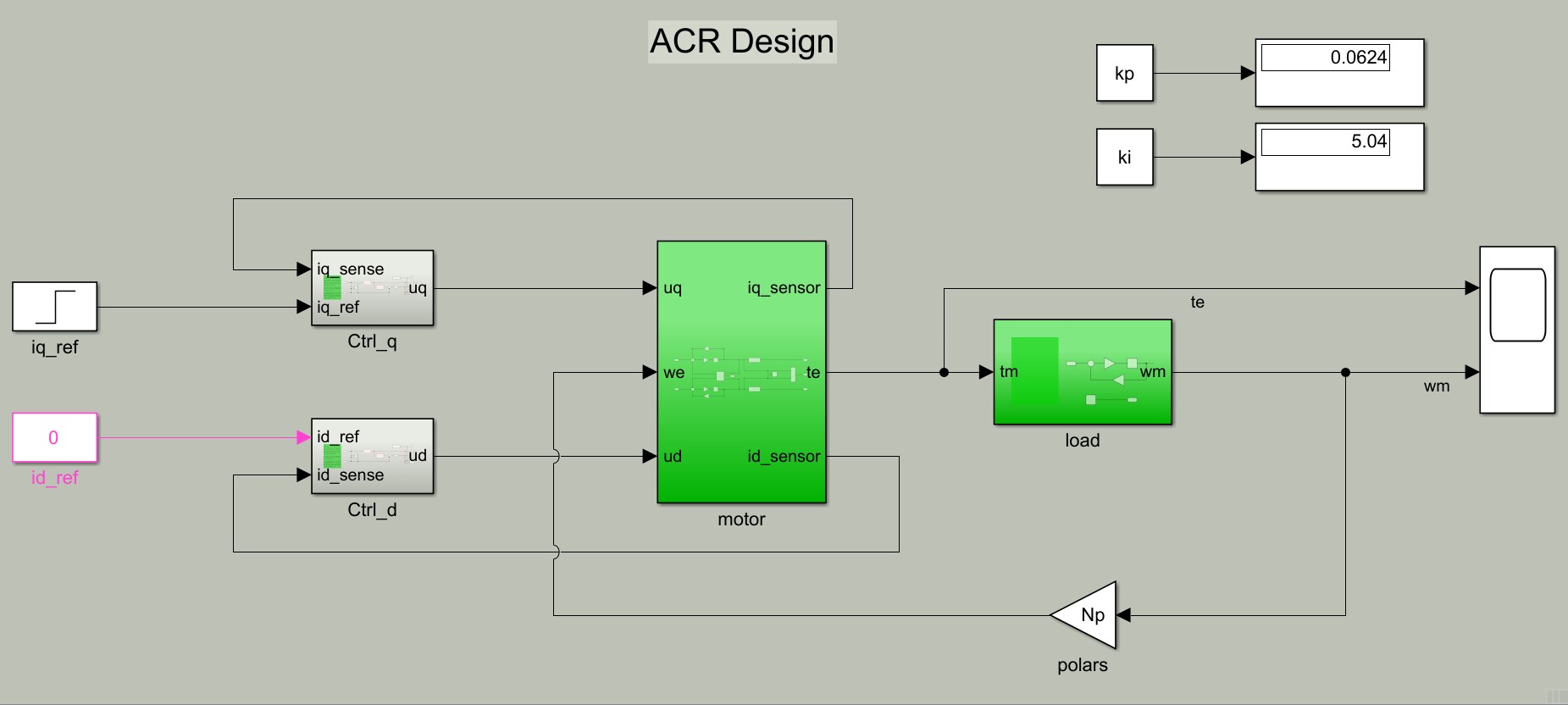
电流环控制在现代工业控制中起到至关重要的作用。然而,电流环受到各种扰动的干扰,对其进行补偿是提高控制系统性能的关键之一。本文通过引入电流环扰动观测器,探讨了一种有效的补偿策略,以提高电流环的抗扰动能力。
二、电流环扰动观测器原理
电流环扰动观测器是一种基于观测器的补偿方法,通过观测电流环中的扰动信号,并通过相应的反馈控制策略对其进行补偿。观测器通常由一个低通滤波器和一个比例控制器组成。低通滤波器用于提取电流环中的扰动信号,比例控制器根据观测到的扰动信号进行反馈控制,以实现对扰动的补偿。通过引入电流环扰动观测器,可以有效提高电流环的抗扰动能力,并对反电势扰动起到很好的作用。
三、电流环抗积分wind-up设计
在电流环控制中,积分环节常常会引起积分饱和问题,导致系统的性能下降甚至不稳定。为了解决这一问题,本文提出了一种基于“钳位式”抗积分wind-up设计的方法。该方法通过限制积分环节的输出幅值,防止积分饱和问题的发生,并通过适当的反馈控制策略来调节积分环节的增益,以实现更好的控制性能。实验证明,该方法能够有效降低积分饱和问题带来的影响,提高系统的鲁棒性。
四、利用控制理论设计PI控制器的方法
传统上,设计PI控制器的方法通常依赖于经验公式或试错设计。然而,这种方法存在着一定的局限性,导致设计的控制器性能不稳定或无法满足实际需求。为了解决这一问题,本文提出了一种基于控制理论的方法,根据时域指标tr或者ts确定PI参数。通过分析系统的传递函数和稳态误差,可以建立控制器参数与时域指标之间的关系,从而实现更加准确和规范的控制器设计。该方法不仅避免了依赖祖传经验的试错设计,还能够满足不同系统的具体要求。
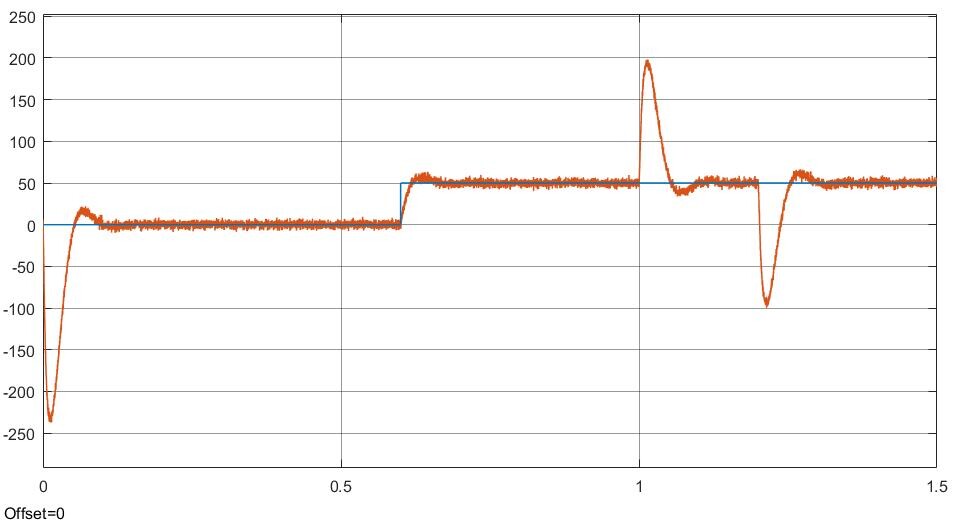
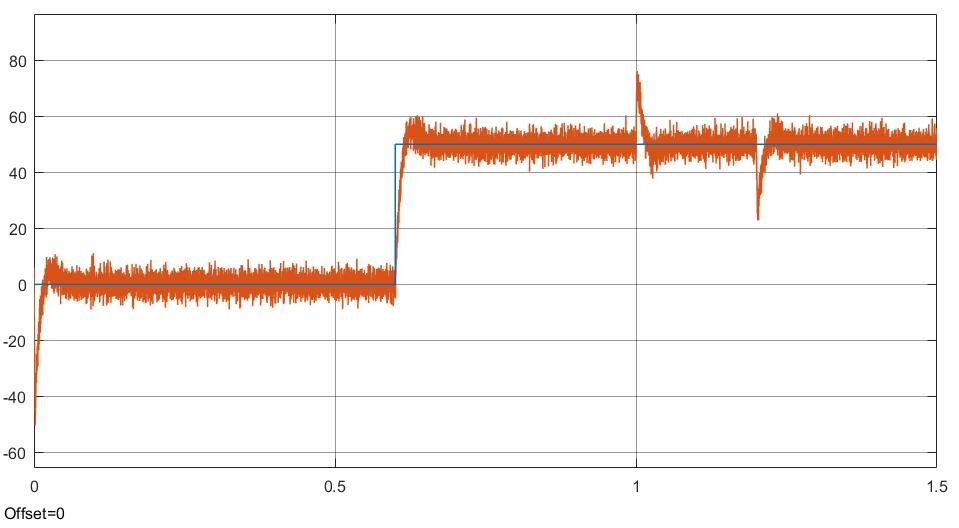
五、实验结果与分析
本文通过实验验证了电流环扰动观测器的有效性和控制器设计方法的可行性。实验结果表明,在引入电流环扰动观测器后,系统的抗扰动能力得到了显著提高,对反电势扰动的补偿效果更加明显。同时,通过利用控制理论设计的PI控制器,系统的控制性能得到了较大的改善,稳态误差得到了有效控制。
六、总结
本文详细介绍了电流环扰动观测器和基于控制理论的PI控制器设计方法。通过引入电流环扰动观测器,可以有效提高电流环的抗扰动能力,并对反电势扰动起到很好的作用。而利用控制理论设计的PI控制器能够更准确地满足不同系统的控制要求。该方法不仅避免了依赖祖传经验的试错设计,还能够提高系统的控制性能和稳定性。在实际应用中,可以根据具体情况选择合适的方法进行系统设计,以实现更好的控制效果。
关键词:电流环扰动观测器,PI参数自动生成,抗积分wind-up设计,控制理论,控制器设计方法
相关代码 程序地址:http://nodep.cn/625826049970.html















 627
627











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









