






静态坐标变换
所谓静态坐标变换,是指两个坐标系之间的相对位置是固定的。
需求描述:
现有一机器人模型,核心构成包含主体与雷达,各对应一坐标系,坐标系的原点分别位于主体与雷达的物理中心,已知雷达原点相对于主体原点位移关系如下: x 0.2 y0.0 z0.5。当前雷达检测到一障碍物,在雷达坐标系中障碍物的坐标为 (2.0 3.0 5.0),请问,该障碍物相对于主体的坐标是多少?
实现分析:
- 坐标系相对关系,可以通过发布方发布
- 订阅方,订阅到发布的坐标系相对关系,再传入坐标点信息(可以写死),然后借助于 tf 实现坐标变换,并将结果输出
1.创建功能包
创建项目功能包依赖于 tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs
2.发布方
#! /usr/bin/env python
import rospy
import tf.transformations
import tf2_ros
import tf
from geometry_msgs.msg import TransformStamped
"""
发布方:发布两个坐标系的相对关系(车辆底盘------basic_link和雷达------laser)
流程:
1、导包
2、初始化节点
3、创建发布对象
4、组织被发布的数据
5、发布数据
6、spin()
"""
if __name__=="__main__":
# 2、初始化节点
rospy.init_node("static_pub_p")
# 3、创建发布对象
pub=tf2_ros.StaticTransformBroadcaster()
# 4、组织被发布的数据
ts=TransformStamped()
#header
ts.header.stamp=rospy.Time.now()
ts.header.frame_id="base_link"
#child frame
ts.child_frame_id="laser"
#相对关系(偏移与四元数)
ts.transform.translation.x=0.2
ts.transform.translation.y=0.0
ts.transform.translation.z=0.5
#四元数 4.1先从欧拉角转换成四元数
qtn=tf.transformations.quaternion_from_euler(0,0,0)
#4.2 再设置四元树
ts.transform.rotation.x=qtn[0]
ts.transform.rotation.y=qtn[1]
ts.transform.rotation.z=qtn[2]
ts.transform.rotation.w=qtn[3]
# 5、发布数据
pub.sendTransform(ts)
# 6、spin()
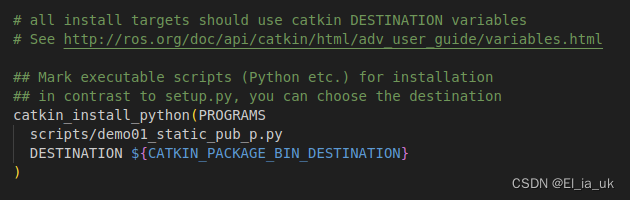
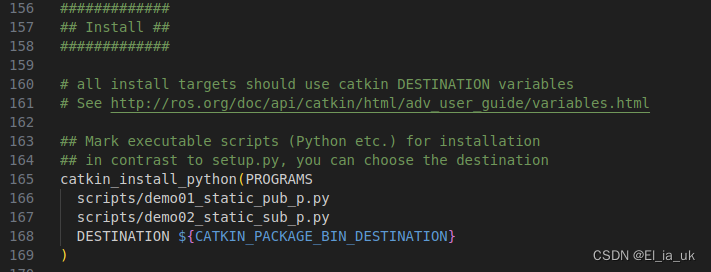
rospy.spin()修改CMakeList.txt文件
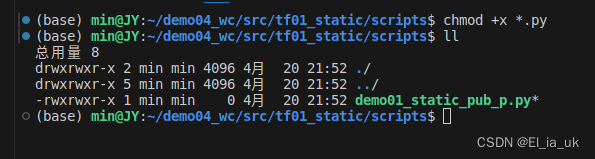
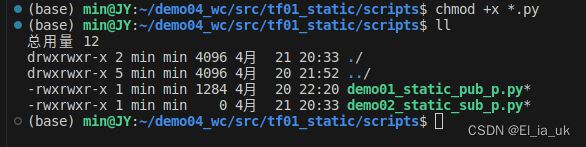
修改scripts权限
若编译时显示 :Could not find a package configuration file provided by “tf2_geometry_msgs“
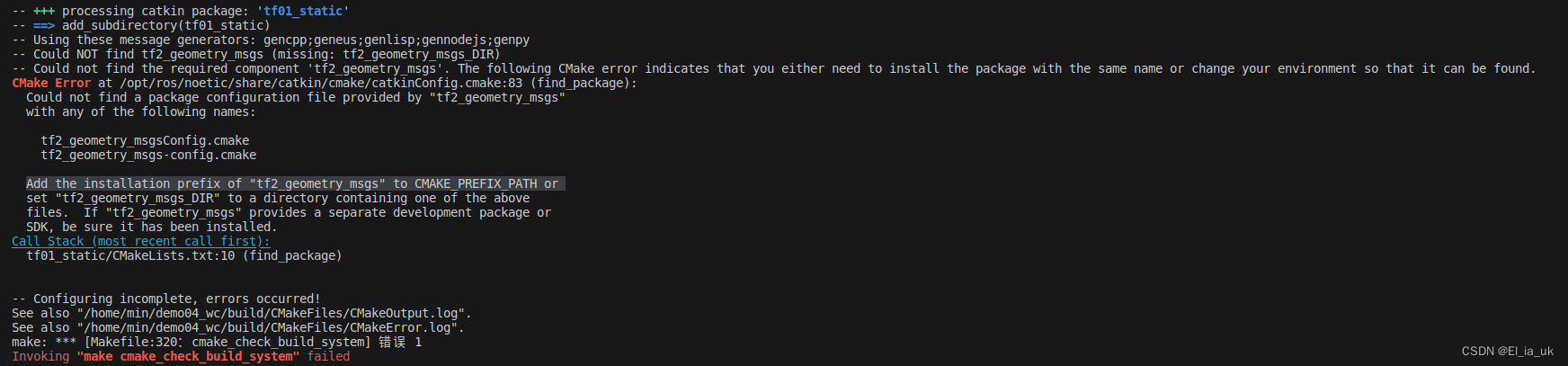
原因:
安装ros时该功能包没有被下载下来
解决办法:
手动安装该功能包
sudo apt install ros-xxxxx-tf2-geometry-msgs
其中xxx为对应ROS的版本号
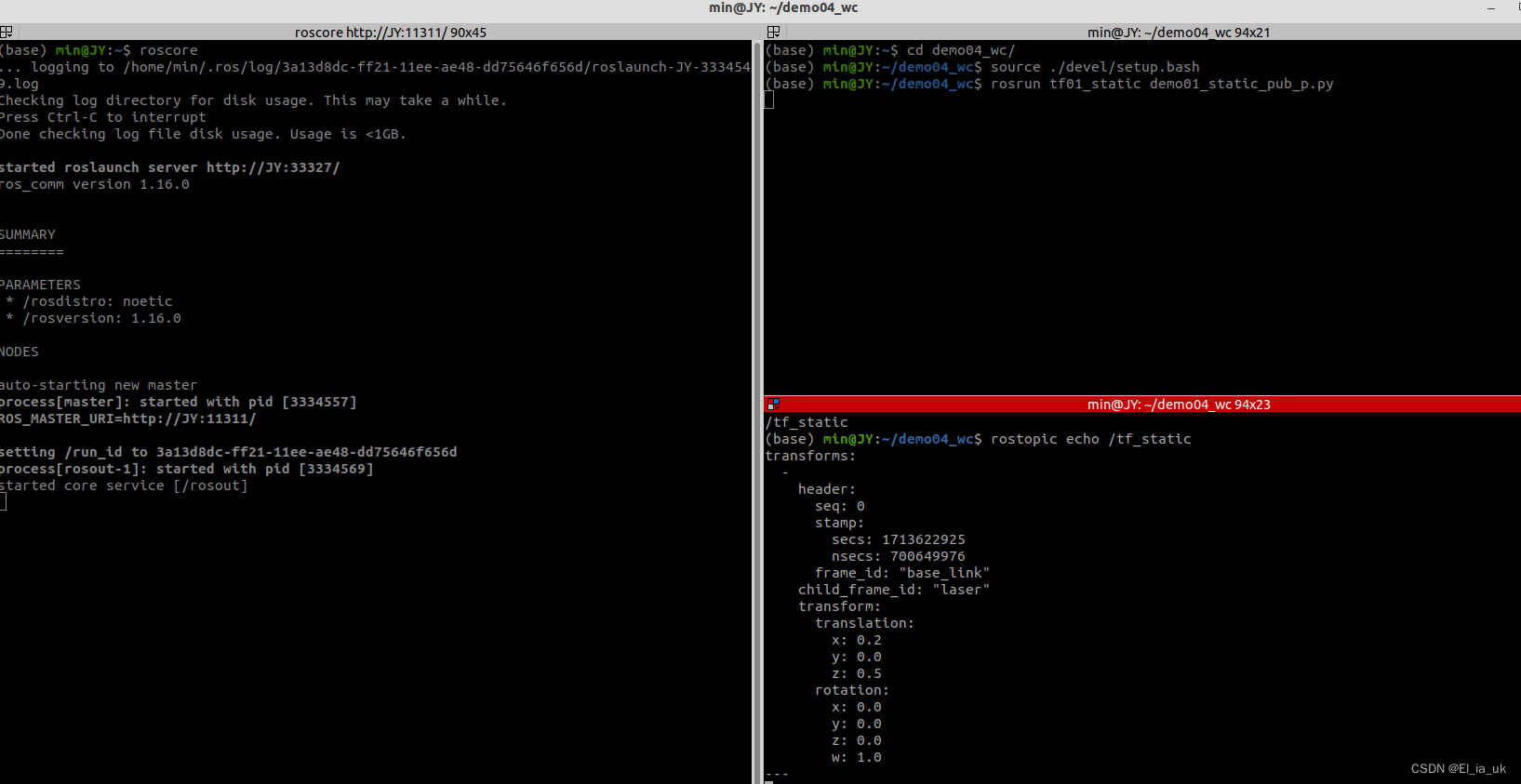
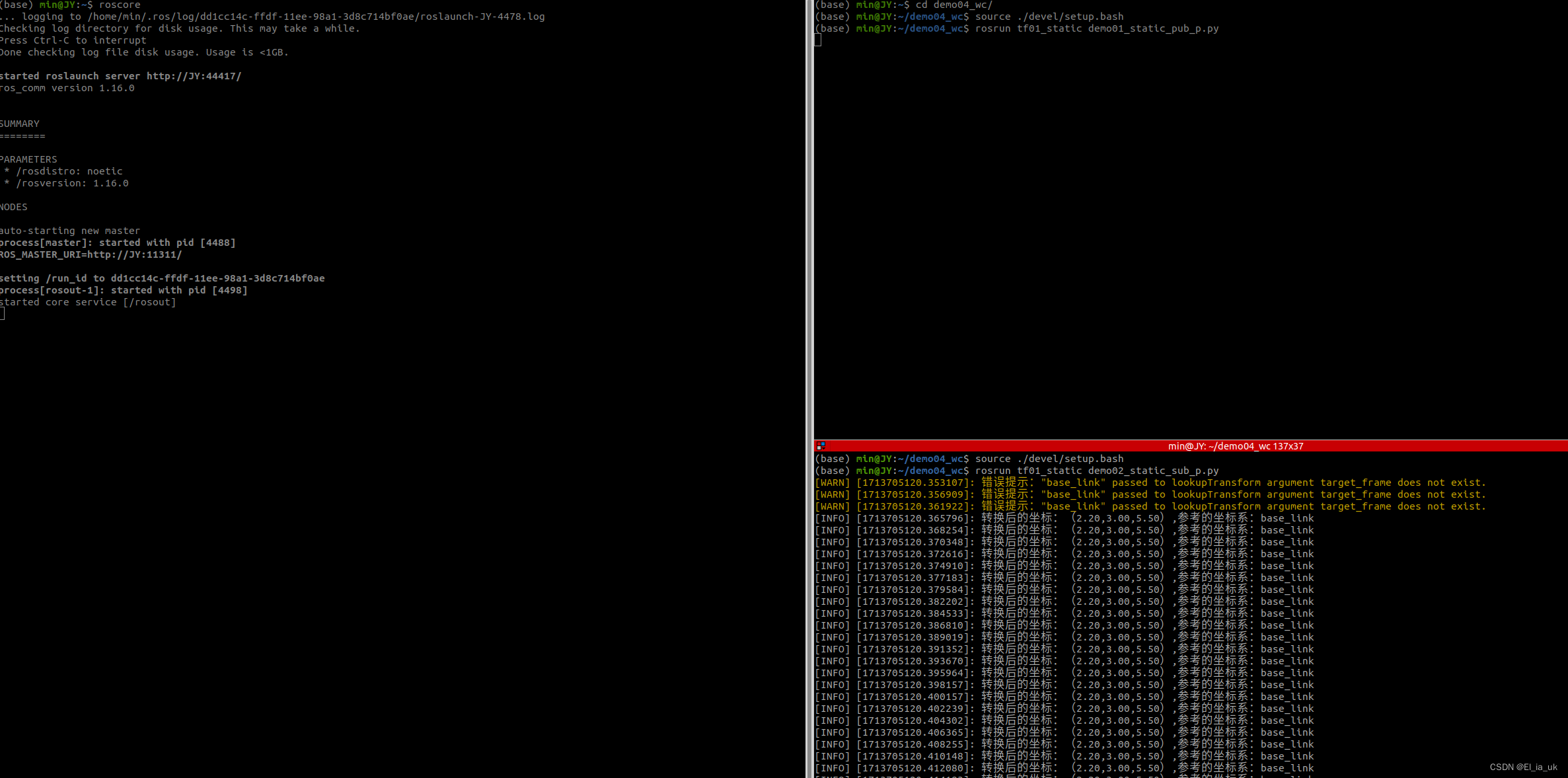
运行结果如下图所示
3.订阅方
#! /usr/bin/env python
import rospy
import tf2_ros
import tf2_geometry_msgs
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStamped
"""
订阅方实现:订阅坐标变换消息,传入被转换的坐标点,调用转换算法
流程:
1、导包
2、初始化
3、创建订阅对象
4、组织被转换的坐标点
5、转换逻辑实现,调用tf封装的算法
6、输出结果
7、spain() |spinOnce()
"""
if __name__=="__main__":
# 2、初始化
rospy.init_node("static_sub_p")
# 3、创建订阅对象
#3-1 创建缓存对象
buffer=tf2_ros.Buffer()
#3-2 创建订阅对象(将缓存传入)
sub=tf2_ros.TransformListener(buffer)
# 4、组织被转换的坐标点
ps= tf2_geometry_msgs.PointStamped()
ps.header.stamp=rospy.Time.now()
ps.header.frame_id="laser"
ps.point.x=2.0
ps.point.y=3.0
ps.point.z=5.0
# 5、转换逻辑实现,调用tf封装的算法
rate=rospy.Rate(10)
while not rospy.is_shutdown():
try:
#转换实现
"""
参数一:被转换的坐标点
参数二:目标坐标系
返回值:转换后的坐标点
ps
问题:抛出异常 base_link 不存在
原因:转换函数调用时,可能还没有订阅到坐标系的相对信息
解决:try捕获异常并处理
"""
ps_out=buffer.transform(ps,"base_link")
# 6、输出结果
rospy.loginfo("转换后的坐标:(%.2f,%.2f,%.2f),参考的坐标系:%s",
ps_out.point.x,ps_out.point.y,ps_out.point.z,ps_out.header.frame_id)
except Exception as e:
rospy.logwarn("错误提示:%s",e)
# 7、spain() |spinOnce()
rate.sleep()修改CMakeList.txt文件
修改scripts权限
编译运行
参考链接:















 2383
2383

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









