







 本文档详细记录了维特智能姿态传感器WT901C-485的MODBUS协议配置,包括如何更改波特率和地址,以及磁场校准的步骤。在磁场校准过程中,虽然yaw角度存在偏差,但通过特定操作可以暂时修正。使用官方上位机进行加速度和磁场的校准是关键步骤。
本文档详细记录了维特智能姿态传感器WT901C-485的MODBUS协议配置,包括如何更改波特率和地址,以及磁场校准的步骤。在磁场校准过程中,虽然yaw角度存在偏差,但通过特定操作可以暂时修正。使用官方上位机进行加速度和磁场的校准是关键步骤。
情况描述
调试维特智能公司的一款姿态传感器,型号为 WT901C-485 ,记录一下调试过程
更改地址与波特率
首先有两点要注意:
-
这一款的传感器使用的是MODBUS协议,协议内容与寄存器地址可参考官方文档 - Modbus协议。
-
更改参数之前需要解锁,更改参数之后需要保存,否则无法修改成功。
-
这款传感器刚出厂时波特率为 9600 8-1-N ,地址为 0x50
改波特率
修改波特率的指令发送如下图(注意三步需要在10s内完成,图中发送指令是对的,但是时间间隔有点长,所以修改失败了)

发送的指令为:
50 06 00 69 B5 88 22 A1
50 06 00 04 00 06 45 88
50 06 00 00 00 00 84 4B
如果把波特率改为38400,那么指令为
50 06 00 69 B5 88 22 A1
50 06 00 04 00 04 C4 49
50 06 00 00 00 00 84 4B
注:写指令时,以第一行为例,50表示地址,06表示写,00 69为寄存器地址,b5 88为指令,最后两位为CRC-16(modbus)校验位,可通过在线CRC计算得到,一些上位机也有自动添加校验位的功能。
改地址
改地址的指令如下图所示,操作也需在10s内完成
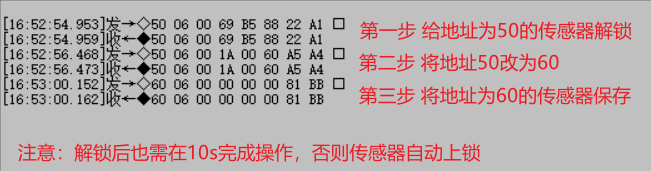
发送的指令为:
50 06 00 69 B5 88 22 A1
50 06 00 1A 00 60 A5 A4
60 06 00 00 00 00 81 BB
此外,更改其他参数也是按照这个流程。
磁场校准
使用维特智能官方提供的上位机进行磁场校准,但是我校准之后发现yaw角依然不太对,不知道为啥。但是我也没管了,因为我的项目主要用的是pitch角度与roll角度。
下载上位机
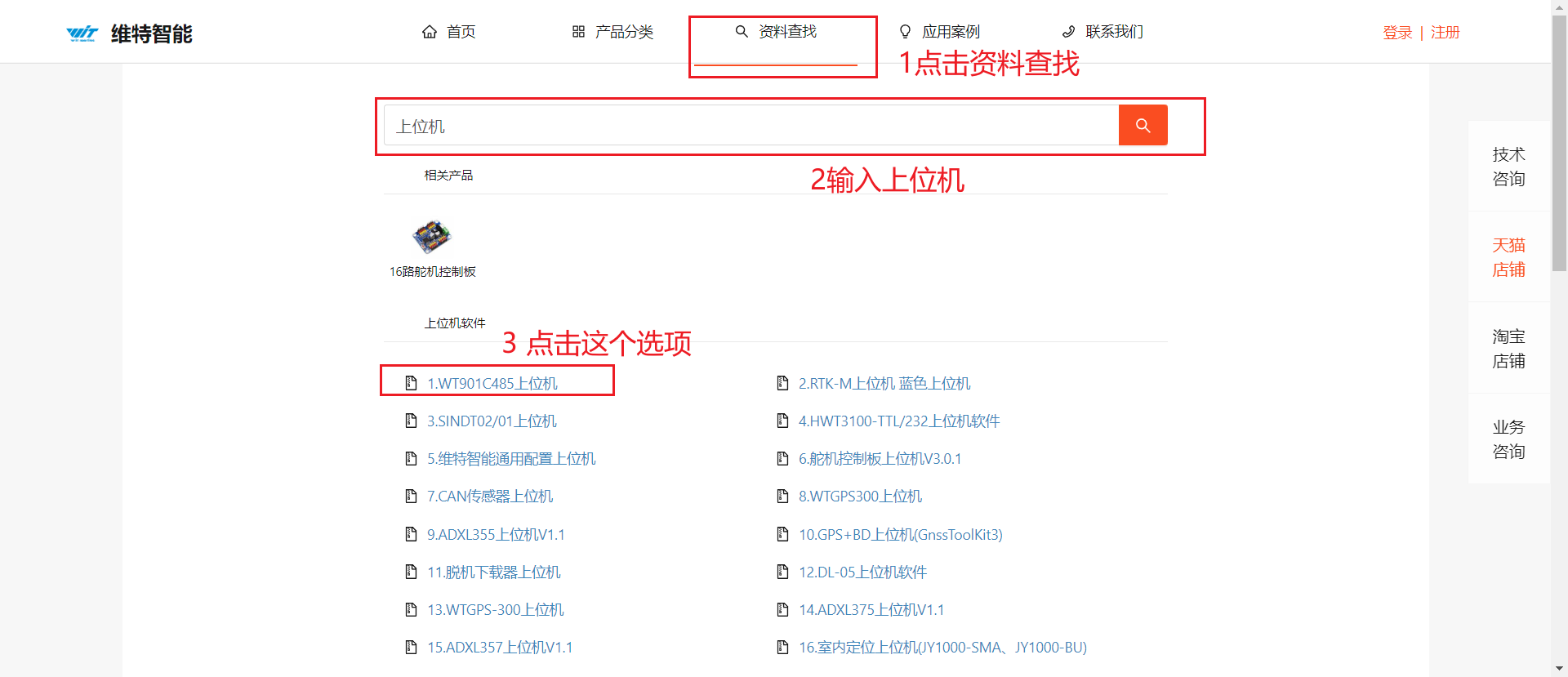
进入维特智能官网,按下图操作下载上位机。
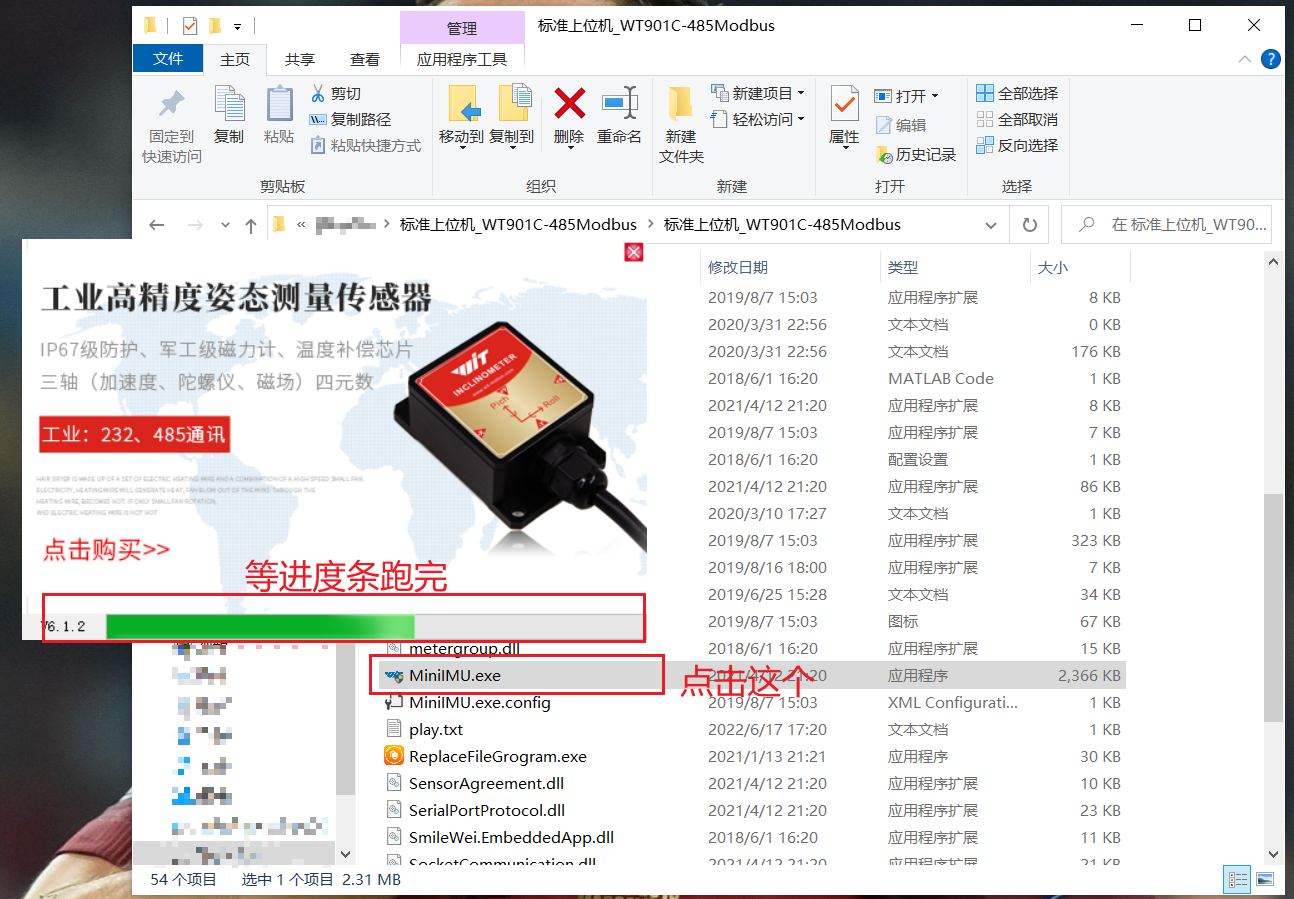
解压下载的文件夹,然后点击MiniIMU.exe文件,等待其更新系统。
然后进入上位机主界面,上位机显示正在搜索设备,但是其默认的配置(串口COM,波特率9600,设备型号WT901C(TTL))不一定能找到我们的设备。

将左上角的配置更改为我们的配置,然后点击打开,即可搜索到设备。

进行校准
校准流程可参考产品介绍页面 中的“操作视频”——11.姿态传感器磁场校准。
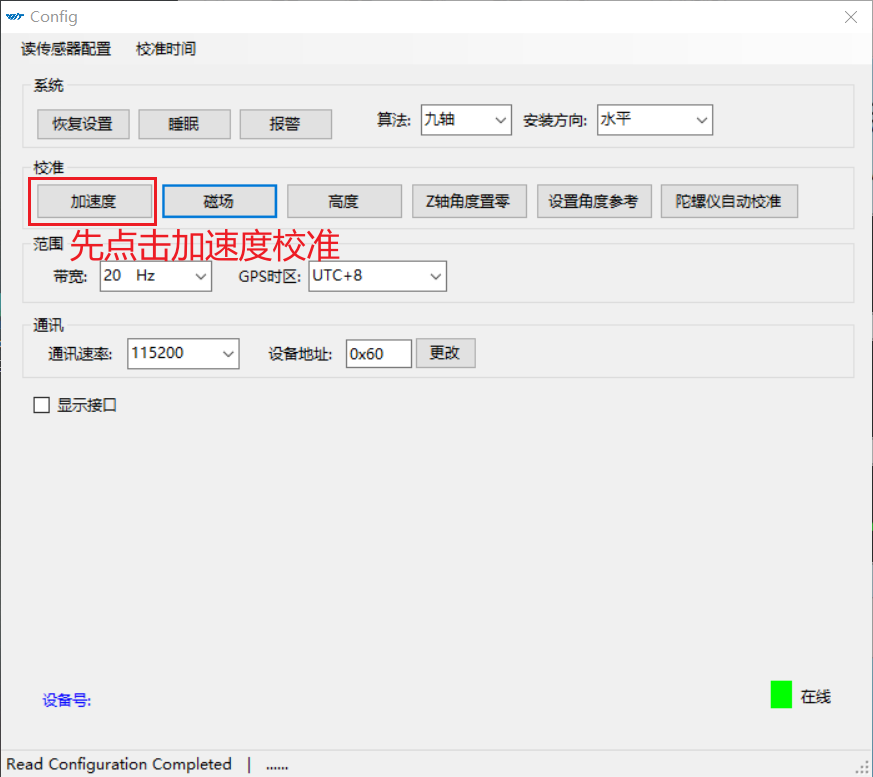
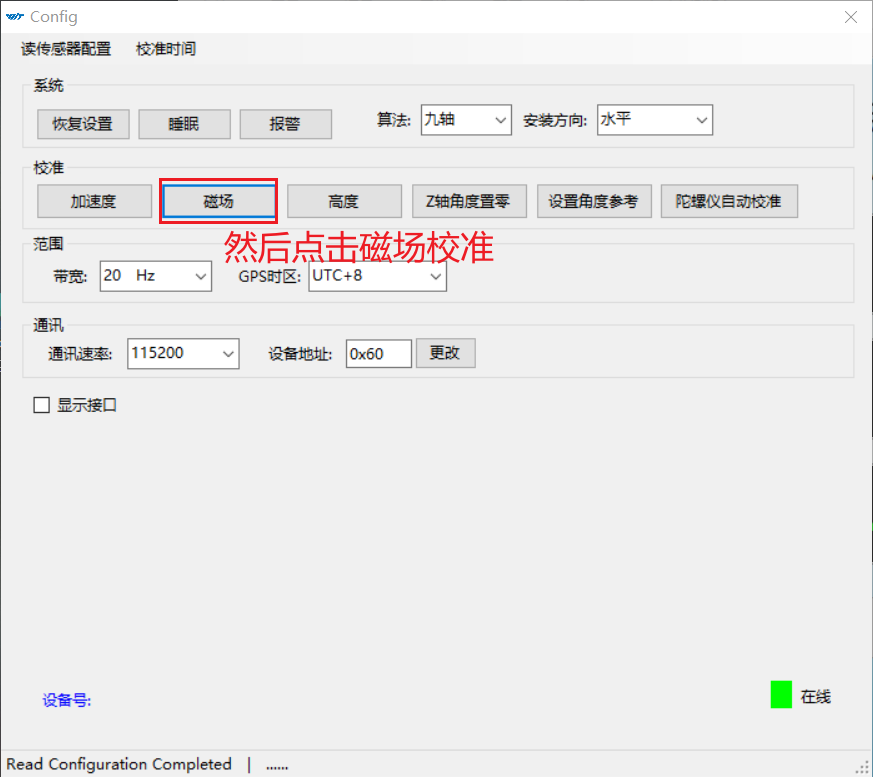
点击上位机上方的配置按键,进入配置页面。
首先将传感器水平放置在桌面上,即 X Y XY XY 平面与水平面平行, Z Z Z 轴指向天空,点击加速度,等待一段时间即可,即完成加速度校准。
然后点击磁场。
在新弹出来的界面中,点击球形拟合法,然后参考视频进行磁场校准。
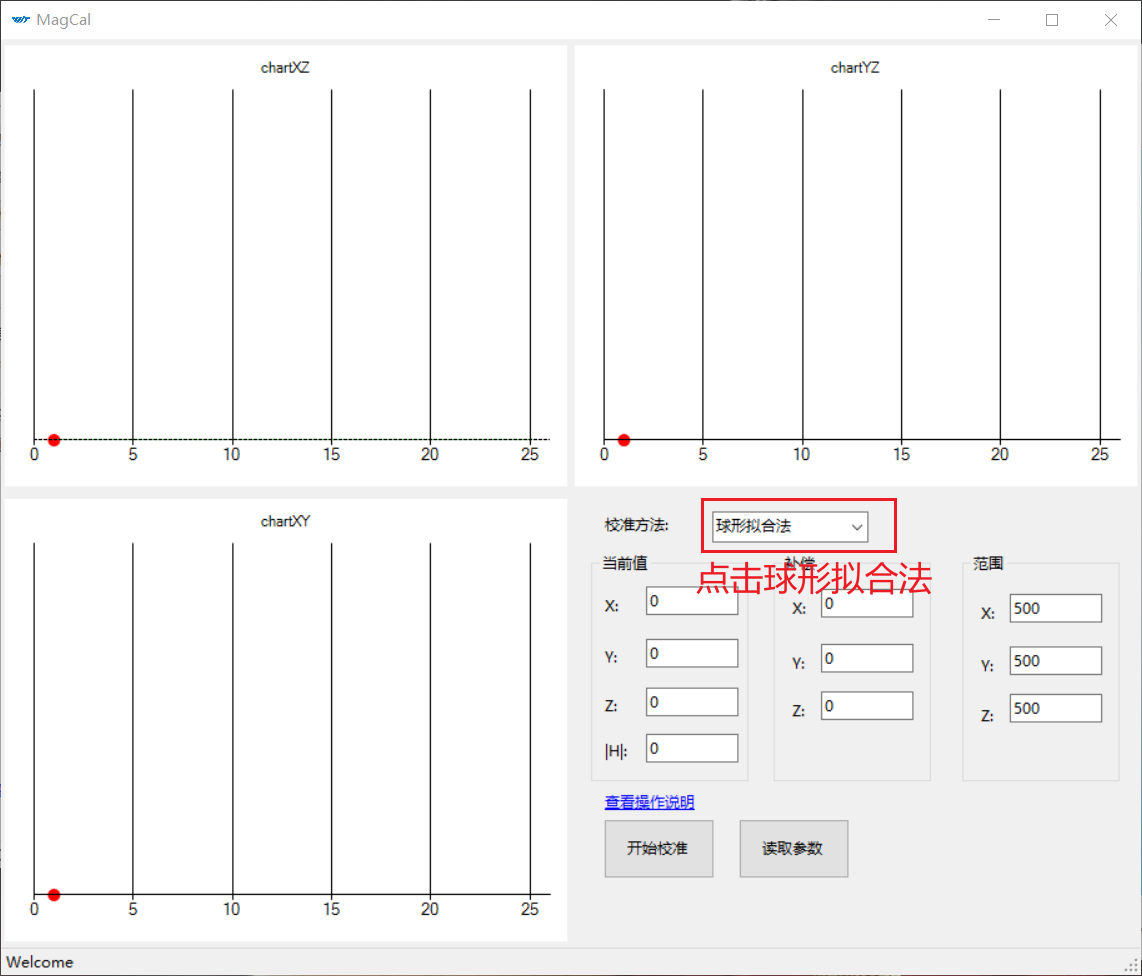
但是我校准之后发现yaw角度还是与正北有几度到几十度的差距,很奇怪。而且当我随便将传感器旋转了一段之后,yaw轴又会偏差很大。这是个需要留给以后考虑的问题。
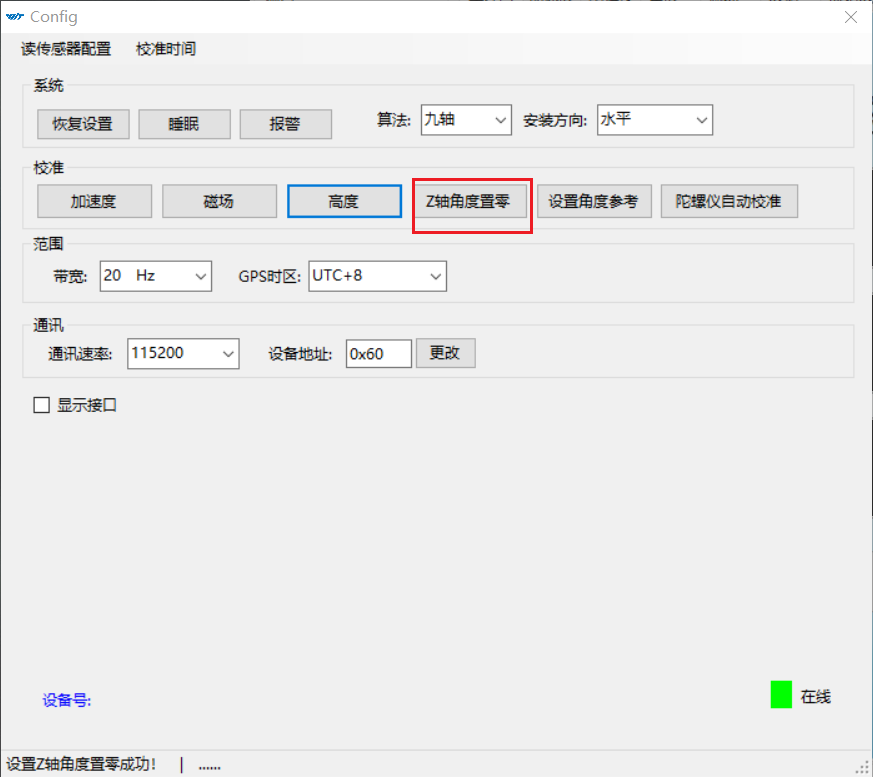
此外,将传感器的 X Y Z XYZ XYZ 轴与东北天方向重合,点击Z轴角度置零,可以暂时将yaw角度变的正确,但是将传感器转动一段时间过后,yaw角度又会不对。

















 1268
1268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









