







 本文介绍了如何启动SITL模拟环境,并通过Python和DroneKit连接、控制无人机的起飞、降落、飞行模式切换以及设置飞行路径。同时,展示了如何在GUIDED和AUTO模式下操控无人机,以及控制飞行速度和方向的方法。此外,还提供了自动化脚本示例。
本文介绍了如何启动SITL模拟环境,并通过Python和DroneKit连接、控制无人机的起飞、降落、飞行模式切换以及设置飞行路径。同时,展示了如何在GUIDED和AUTO模式下操控无人机,以及控制飞行速度和方向的方法。此外,还提供了自动化脚本示例。
1、启动SITL
启动STL
cd courseRoot/apm/ardupilot/
sim_vehicle.py -v ArduCopter --console --map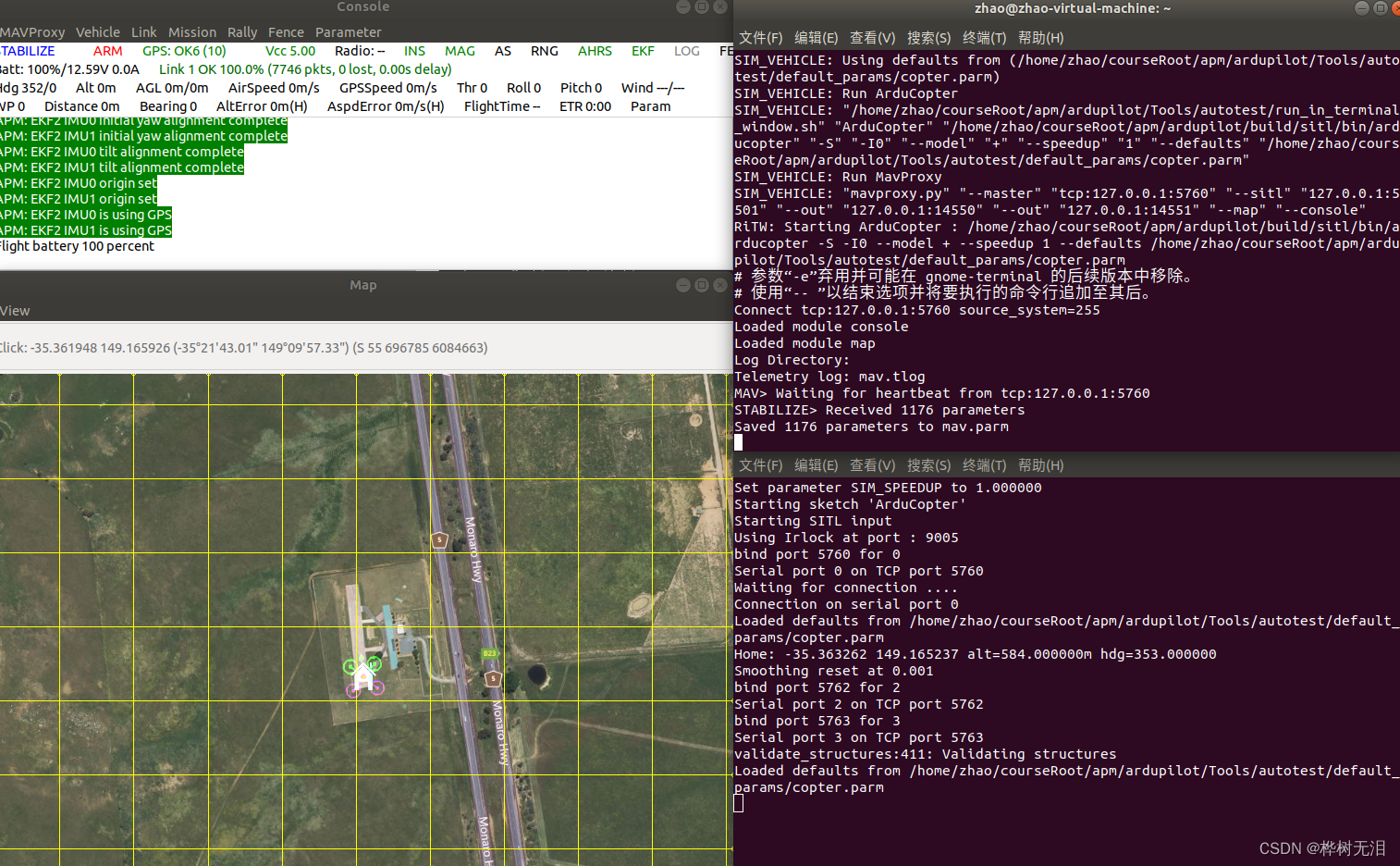
飞机起飞降落
mode GUIDED
arm throttle
takeoff 10
mode LAND
2、连接地面端
cd /courseRoot/src
./QGroundControl.AppImage 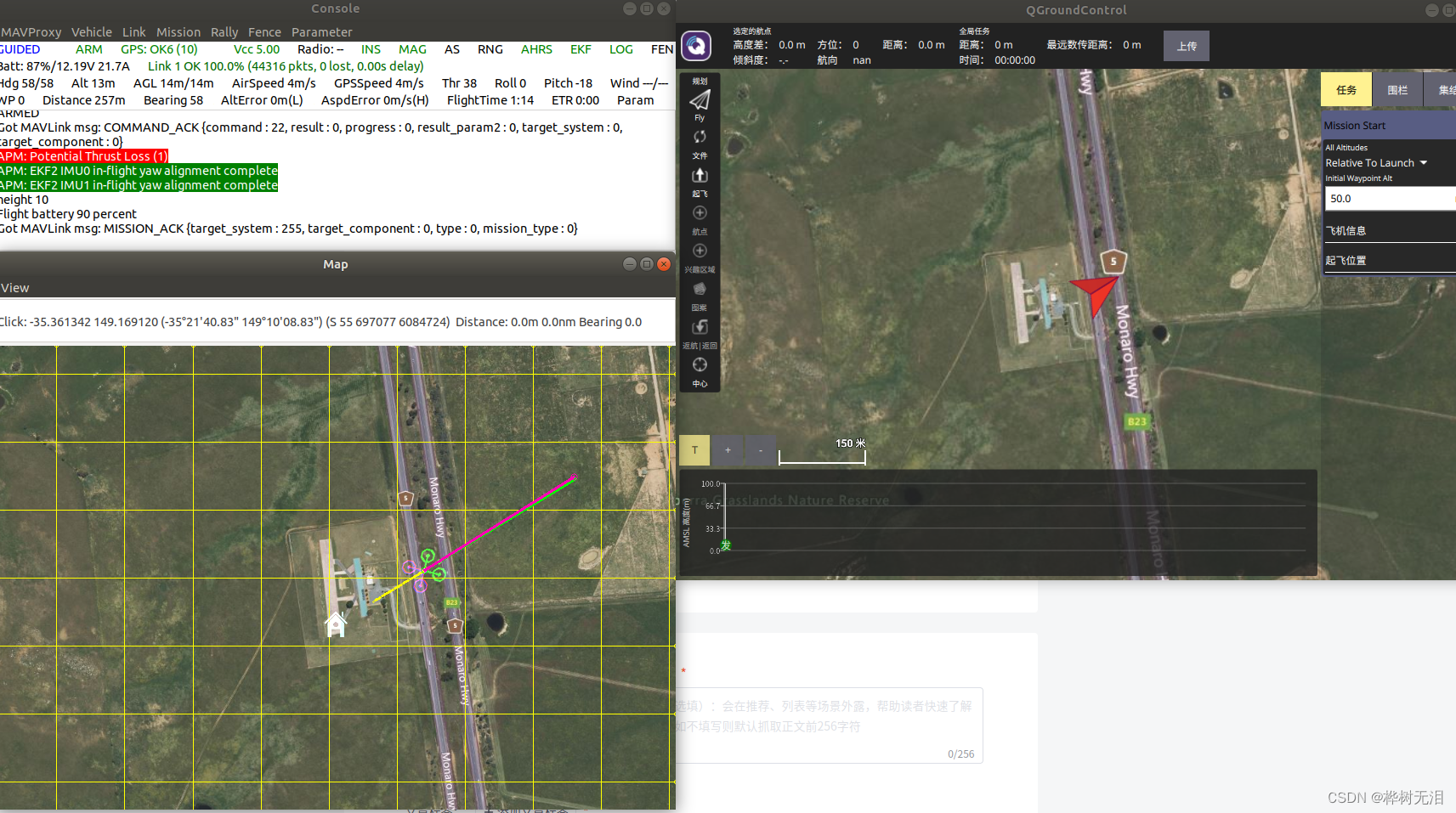 3、连接内部STIL脚本
3、连接内部STIL脚本
- 打开SITL sim_vehicle.py -v ArduCopter

可以看到STIL提供两个对外接口 127.0.0.1:14550 和14551用来连接python脚本
- python连接STIL脚本
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException
import time
import socket
import exceptions
import math
import argparse
#####FUNCTIONS#####
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
#####MAIN EXECUTABLE#####
vehicle = connectMyCopter()
python connection_template.py --connect 127.0.0.1:14550
出现上图说明连接成功
- 起飞脚本
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException
import time
import socket
import exceptions
import math
import argparse
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
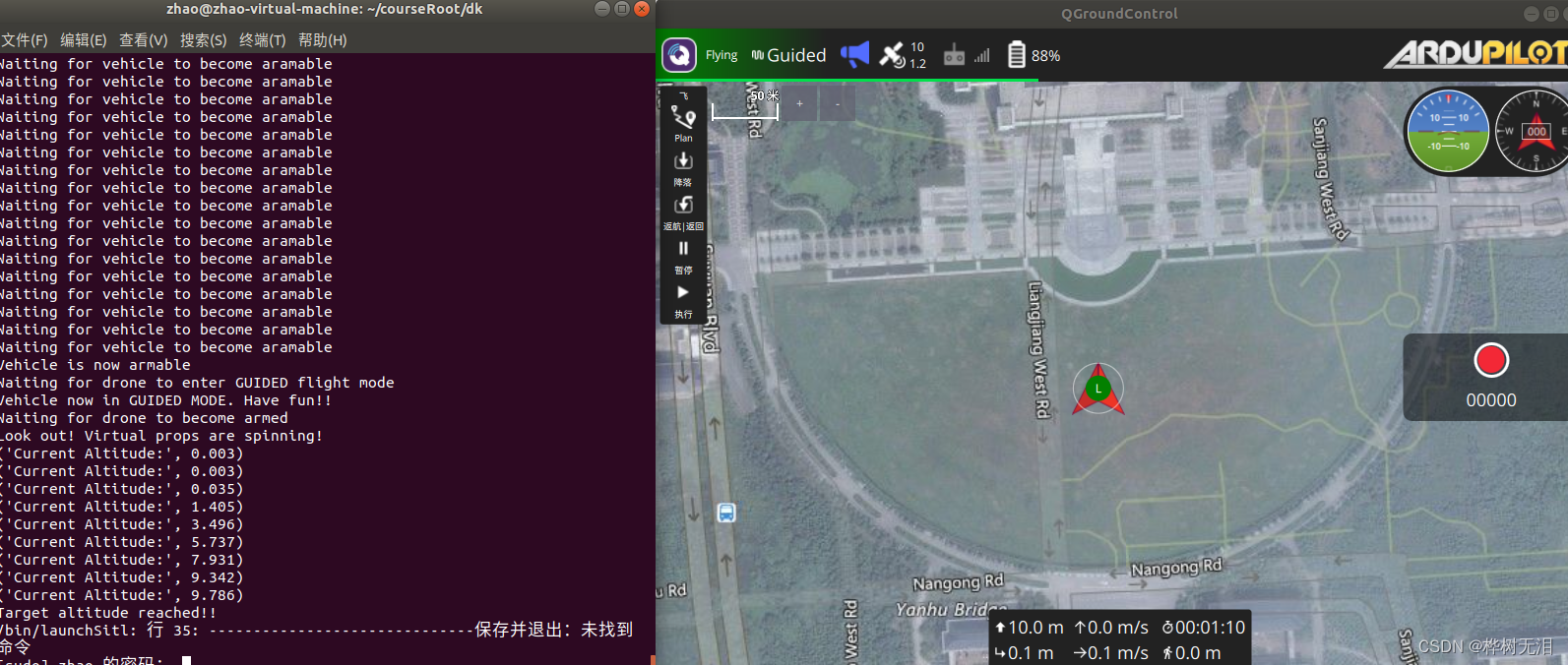
print("Waiting for vehicle to become aramable")
time.sleep(1)
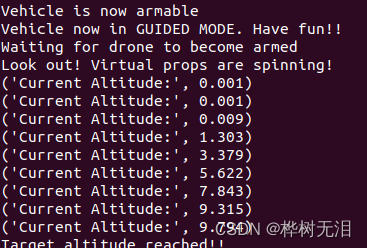
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
vehicle = connectMyCopter()
arm_and_takeoff(10)起飞成功
python basic_template.py --connect 127.0.0.1:14550
4、 连接外部SITL脚本
写bash文件放到bin目录下 sudo chmod 777 launchSilt
#!/bin/bash
kill -9 $(ps -eF | grep QG | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep ardu | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep mav | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep apm | awk -F ' ' '{print $2}')>/dev/null 2>&1
#########
## Launch a Sitl drone
/home/zhao/courseRoot/apm/ardupilot/build/sitl/bin/arducopter -S -I0 --home 31.88763137,118.814176,13,0 --model "+" --speedup 1 --defaults $apm/ardupilot/Tools/autotest/default_params/copter.parm&
sleep 5
## Launch QGC
/home/zhao/courseRoot/src/QGroundControl.AppImage 2>/dev/null&
sleep 5
## Start MAVProxy
screen -dm mavproxy.py --master=tcp:127.0.0.1:5760 --out=127.0.0.1:14550 --out=127.0.0.1:5762
##Launch the dronekit-python script
/usr/bin/python "$1" --connect 127.0.0.1:5762
function finish {
kill -9 $(ps -eF | grep QG | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep ardu | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep mav | awk -F ' ' '{print $2}')>/dev/null 2>&1
kill -9 $(ps -eF | grep apm | awk -F ' ' '{print $2}')>/dev/null 2>&1
}
trap finish EXIT
------------------------------保存并退出
chmod +x launchSitl
sudo cp launchSitl /usr/local/bin/launchSitllaunchSitl basic_template.py
在GUIDED模式下操控无人机就像你在手控制无人机一样,需要你不断地向无人机发送指令来操控无人机。而在AUTO模式下,你可以直接将你的飞行计划上传到无人机(也是通过MAVLink),这样无人机可以持续执行飞行计划,而不需要一直发送信息。所以AUTO模式非常适合你要让无人机执行一些自动化任务时。而GUIDED模式比较适合你需要让无人机根据环境来改变飞行状态等动态性较高的任务,比如精准降落等。
launchSitl auto_mission.py
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
vehicle = connectMyCopter()
wphome = vehicle.location.global_relative_frame
cmd1 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,wphome.lat,wphome.lon,wphome.alt)
cmd2 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,31.88663137,118.812176,25)
cmd3 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_WAYPOINT,0,0,0,0,0,0,31.88563137,118.812876,25)
cmd4 = Command(0,0,0,mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT,mavutil.mavlink.MAV_CMD_NAV_RETURN_TO_LAUNCH,0,0,0,0,0,0,0,0,0)
cmds = vehicle.commands
cmds.download()
cmds.wait_ready()
cmds.clear()
cmds.add(cmd1)
cmds.add(cmd2)
cmds.add(cmd3)
cmds.add(cmd4)
vehicle.commands.upload()
arm_and_takeoff(10)
print("after arm and takeoff")
vehicle.mode = VehicleMode("AUTO")
while vehicle.mode != "AUTO":
time.sleep(.2)
while vehicle.location.global_relative_frame.alt > 2:
print("Drone is executing mission, but we can still run code")
time.sleep(2)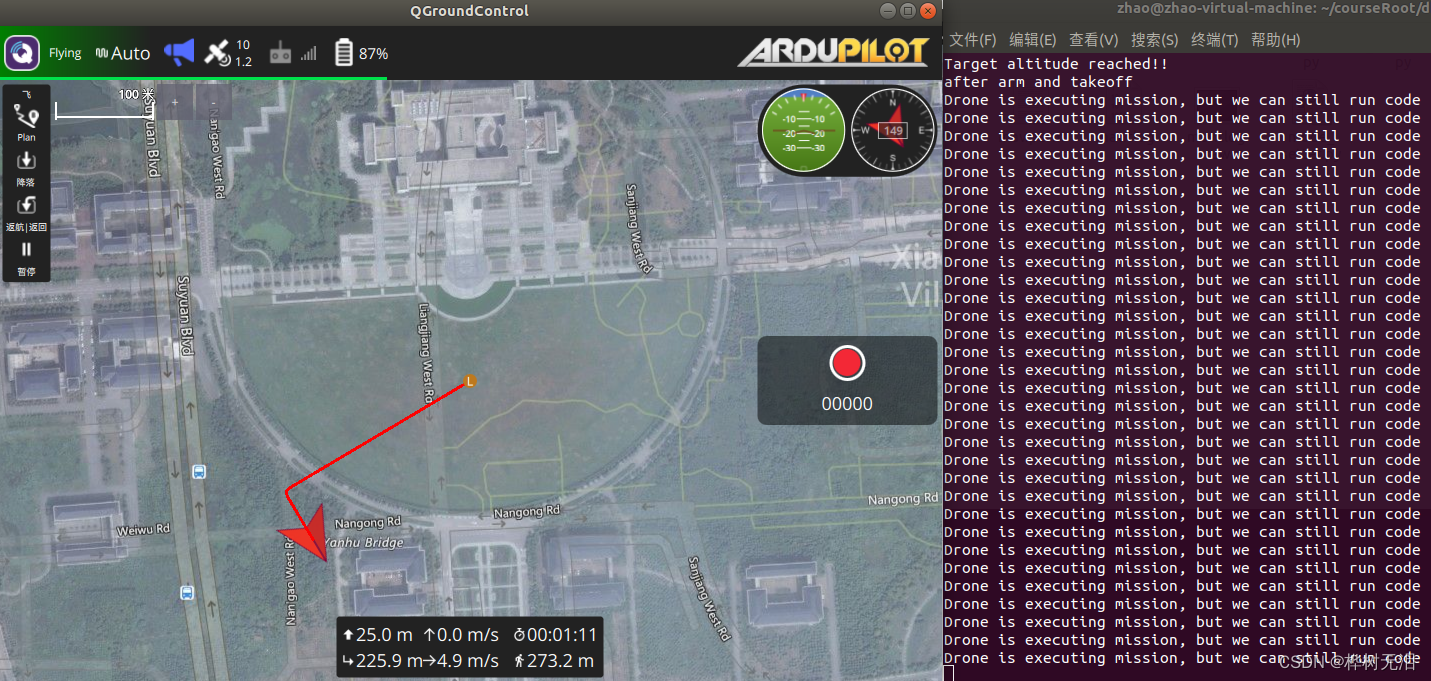
5、 控制飞行速度
全球坐标系北是正X,东是正Y 下是正Z send_global_ned_velocity(vx, vy, vz):
无人机坐标系 无人机正方向X 右Y 下Z send_local_ned_velocity(vx, vy, vz):
要在GUIDED模式下对无人机发送自定义的MAVLink指令,对于多数MAVLink指令,生成相应指令的函数为“小写指令名”+“_encode”
位掩码是一种用来定义状态的一串二进制数字,通过与目标数字串进行逻辑运算来达到控制状态的目的。位掩码可以占用很少资源实现丰富的状态标识。这里给出了三种位掩码,我们需要用表示速度的那个,也就是0b110111000111.
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
def send_global_ned_velocity(vx, vy, vz):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0,0,0,mavutil.mavlink.MAV_FRAME_BODY_OFFSET_NED,
0b110111000111,
0,0,0,
vx,vy,vz,
0,0,0,
0,0)
vehicle.send_mavlink(msg)
vehicle.flush()
def send_local_ned_velocity(vx, vy, vz):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0,0,0,mavutil.mavlink.MAV_FRAME_LOCAL_NED,
0b110111000111,
0,0,0,
vx,vy,vz,
0,0,0,
0,0)
vehicle.send_mavlink(msg)
vehicle.flush()
vehicle = connectMyCopter()
arm_and_takeoff(10)
time.sleep(2)
i=0
while i<=5:
send_global_ned_velocity(5,0,0)
time.sleep(1)
print("Moving TRUE NORTH")
i += 1
time.sleep(2)
i=0
while i<=5:
send_global_ned_velocity(0,-5,0)
time.sleep(1)
print("Moving TRUE WEST")
i += 1
time.sleep(2)
i=0
while i<=5:
send_local_ned_velocity(5,0,0)
time.sleep(1)
print("Moving NORTH relative to front of drone")
i += 1
time.sleep(2)
i=0
while i<=5:
send_local_ned_velocity(0,-5,0)
time.sleep(1)
print("Moving NORTH relative to front of drone")
i += 1
time.sleep(2)
i=0
while i<=5:
send_local_ned_velocity(0,0,5)
time.sleep(1)
print("Moving DOWN")
i += 1
time.sleep(2)
i=0
while i<=5:
send_global_ned_velocity(0,0,-5)
time.sleep(1)
print("Moving UP")
i += 1
while True:
time.sleep(1)6、 控制飞行方向
from dronekit import connect, VehicleMode, LocationGlobalRelative, APIException, Command
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
vehicle = connect(connection_string, wait_ready=True)
return vehicle
def arm_and_takeoff(targetHeight):
while vehicle.is_armable!=True:
print("Waiting for vehicle to become aramable")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!="GUIDED":
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for drone to become armed")
time.sleep(1)
print("Look out! Virtual props are spinning!")
vehicle.simple_takeoff(targetHeight) ##meters
while True:
print("Current Altitude:", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=.95*targetHeight:
break
time.sleep(1)
print("Target altitude reached!!")
return None
def condition_yaw(degrees, relative):
if relative:
is_relative = 1
else:
is_relative = 0
msg = vehicle.message_factory.command_long_encode(
0,0,
mavutil.mavlink.MAV_CMD_CONDITION_YAW,
0,
degrees,
0,1,
is_relative,
0,0,0)
vehicle.send_mavlink(msg)
vehicle.flush()
vehicle = connectMyCopter()
arm_and_takeoff(10)
condition_yaw(30,1)
time.sleep(7)
condition_yaw(0,0)
time.sleep(7)
condition_yaw(270,0)
while True:
time.sleep(1)参考


















 2902
2902

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











