







1. 什么是特征点
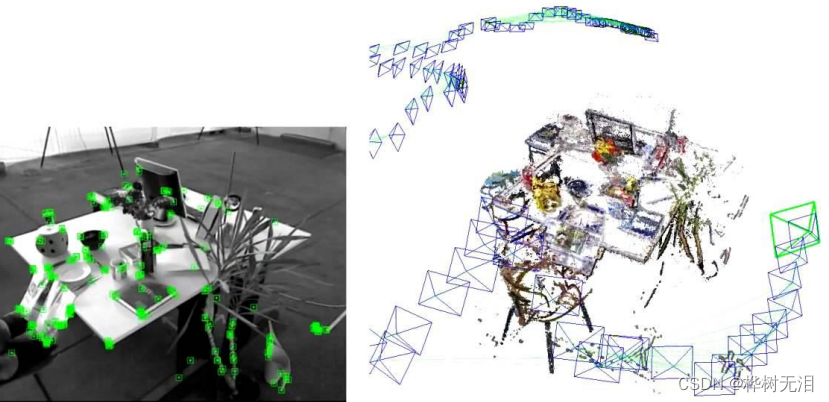
1.1 图像特征点
ORB slam
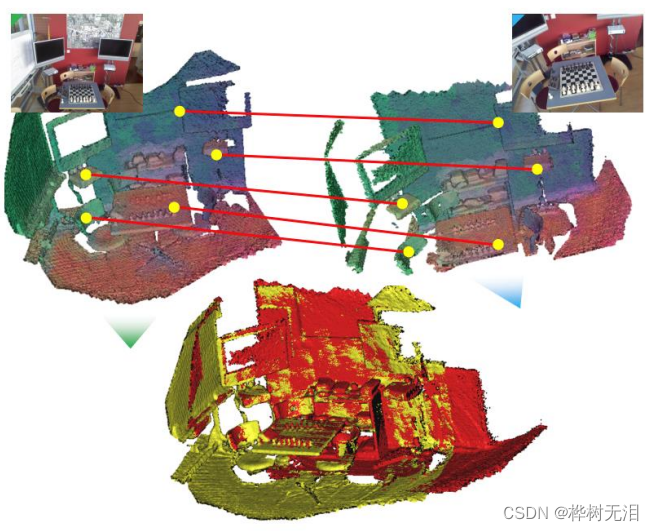
1.2 点云特征点
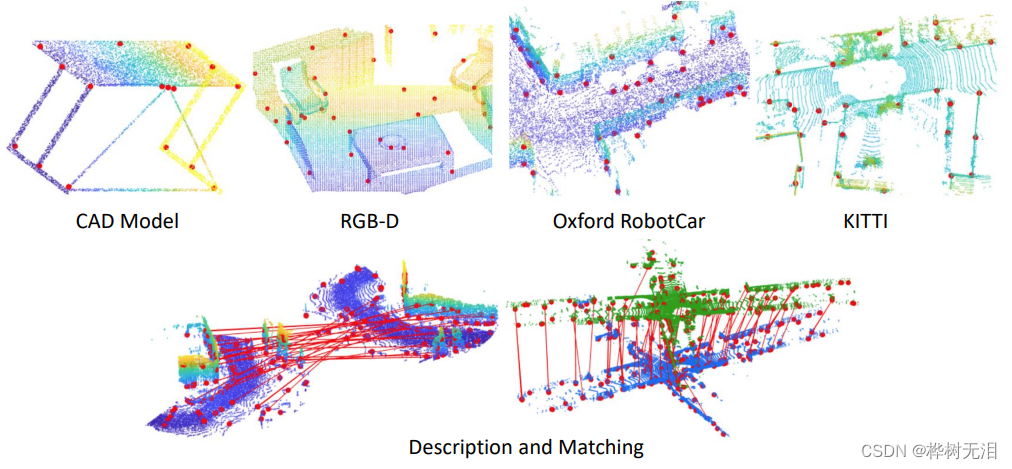
点云配准 :ICP要求有足够好的初始平移旋转矩阵,且有一定的重合率
2. 怎么提取特征点
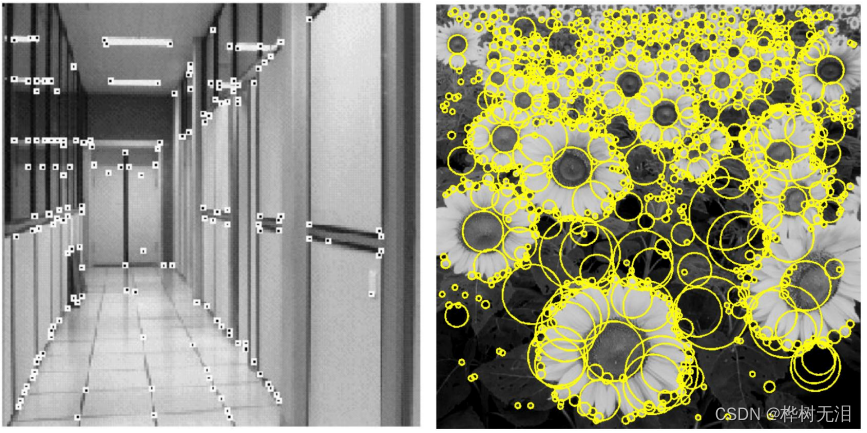
2.1 图像提取特征点
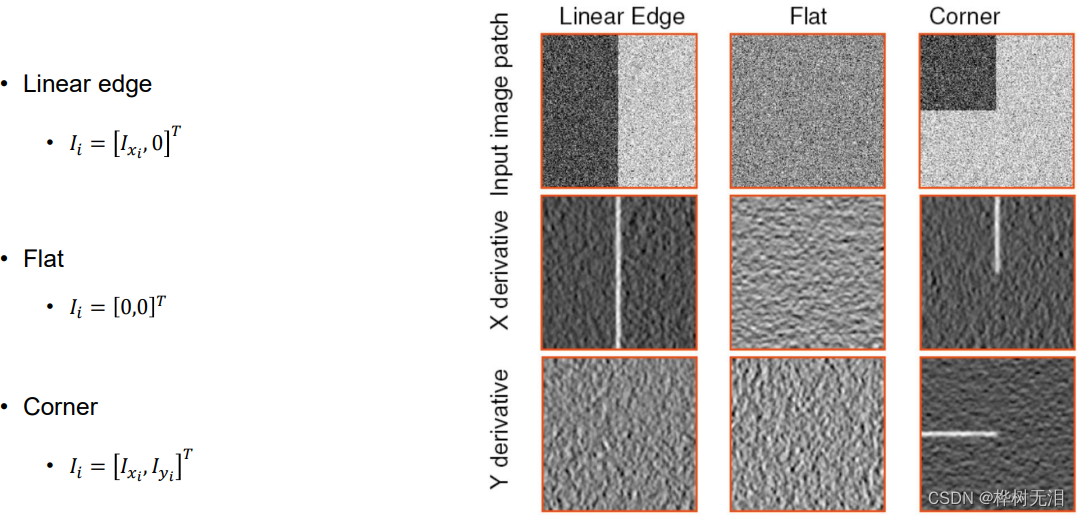
2.1.1 Harris
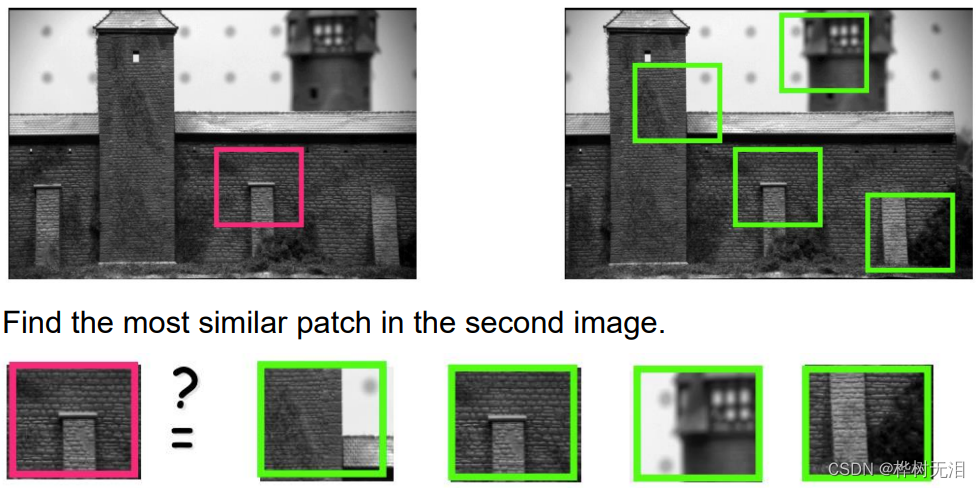
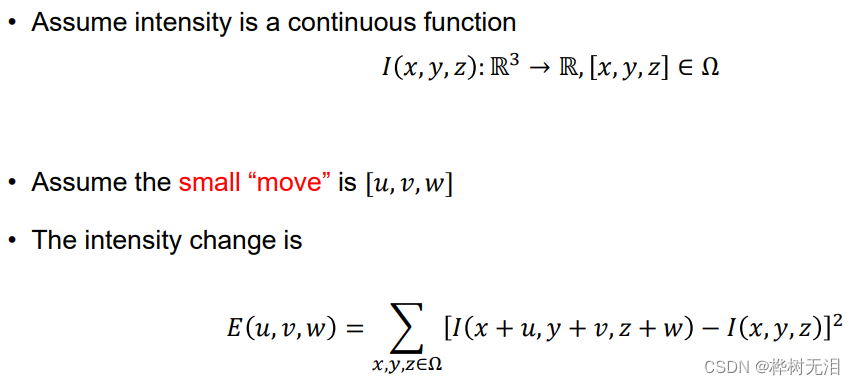
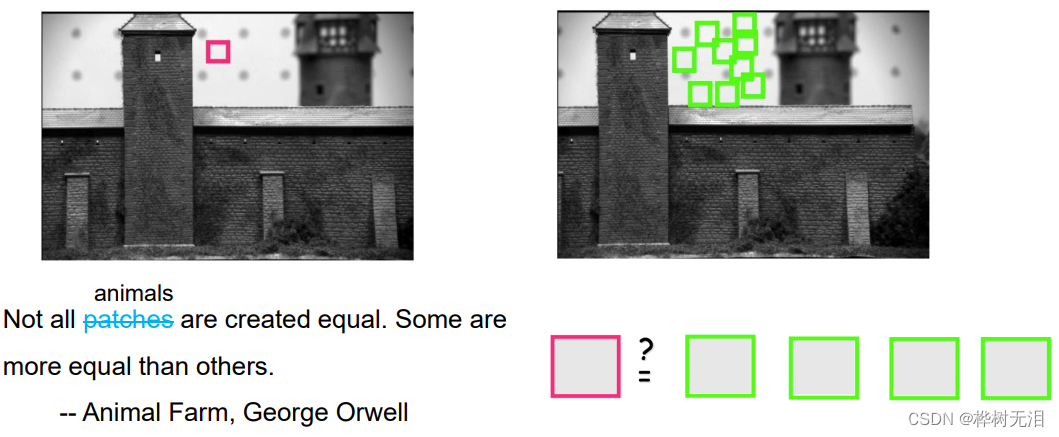 一个好的特征点,内部会随着移动而变动
一个好的特征点,内部会随着移动而变动
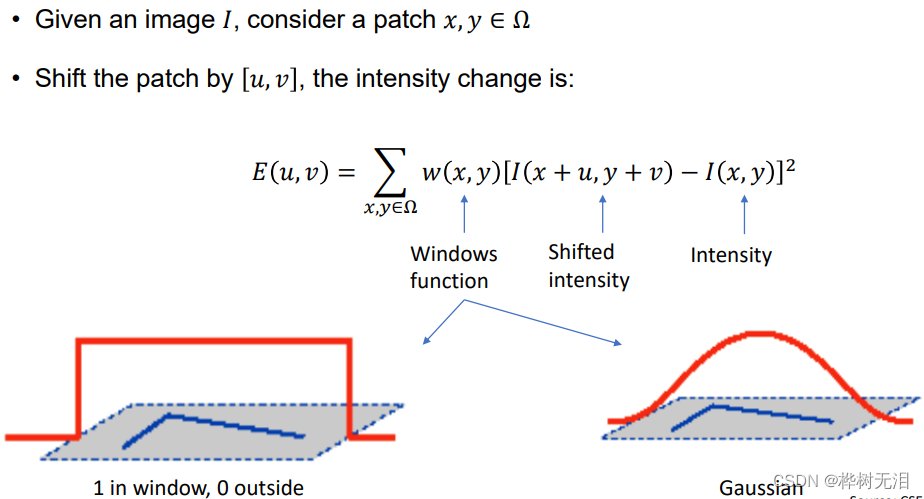
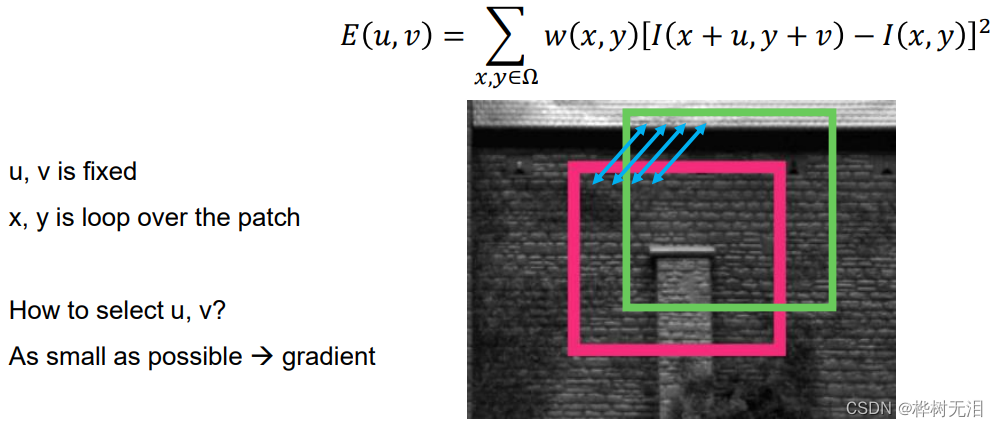
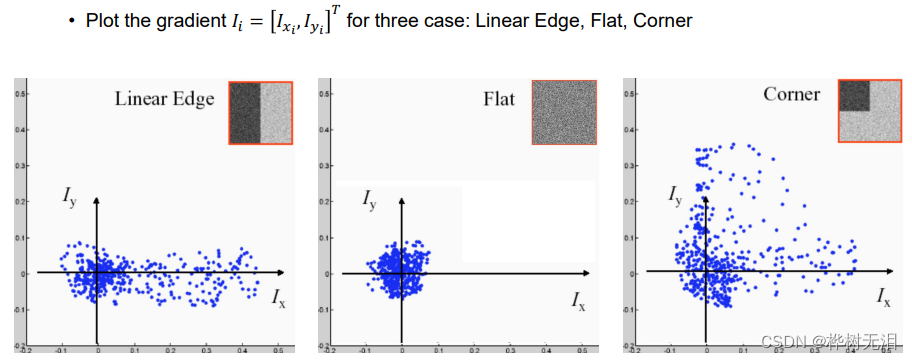
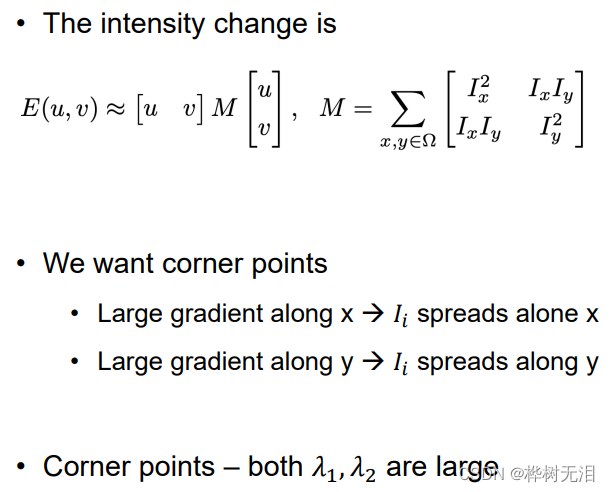
U,V越小越灵敏 特征点是x、y方向都有较大的倒数

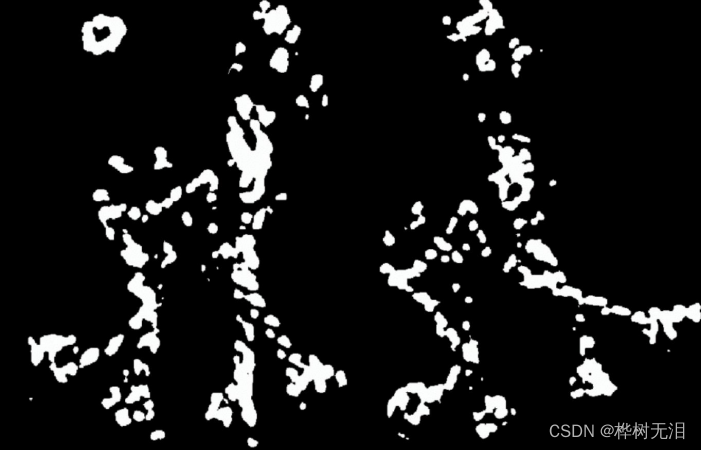
NMS操作过滤特征点

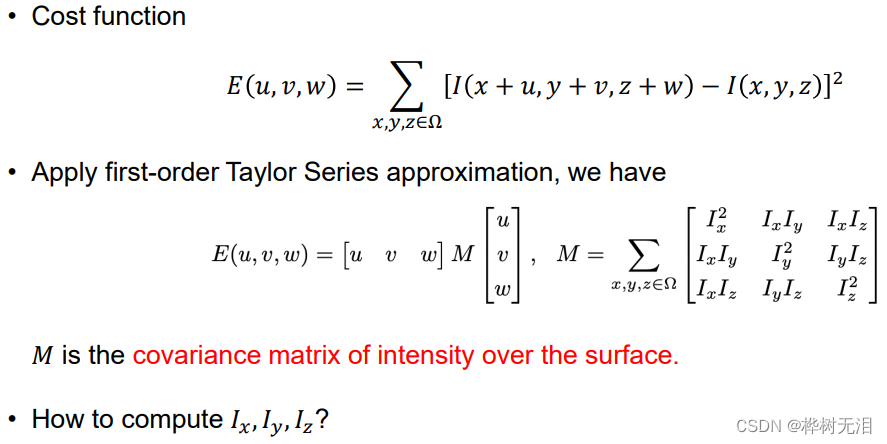
核心思想:一个小方块移动后,里面的Intensity变换来选择特征点。变成了求方块内的协方差矩阵M,每个方向的一阶倒。

2.2 点云特征点
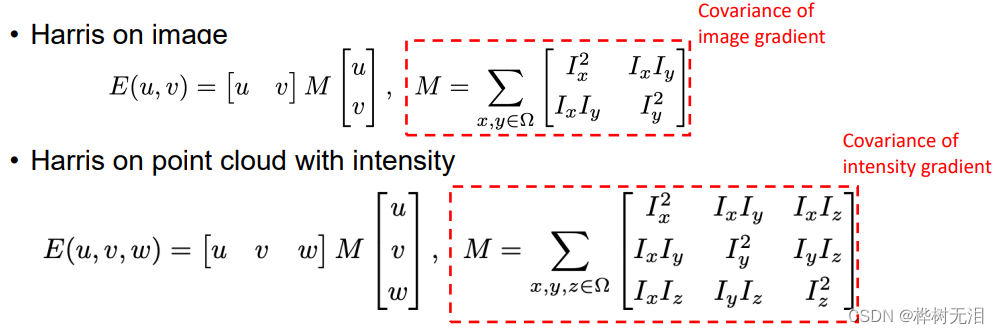
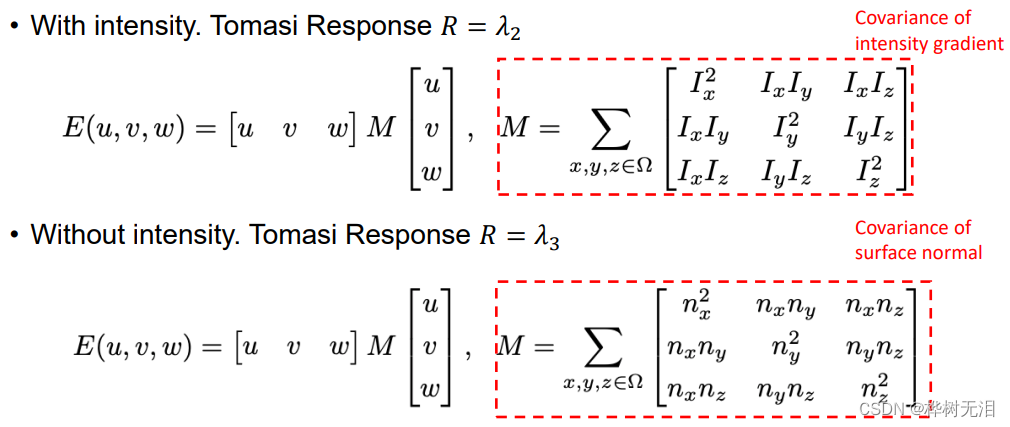
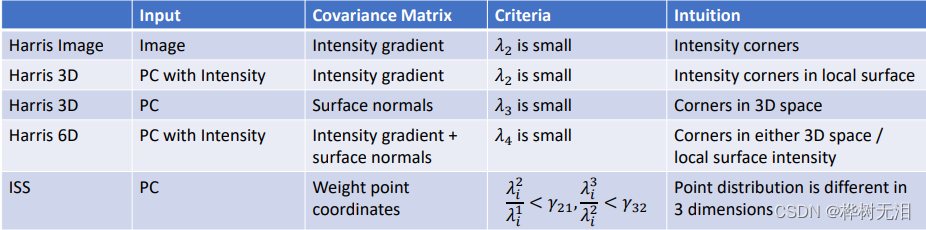
2.2.1 3DHarris
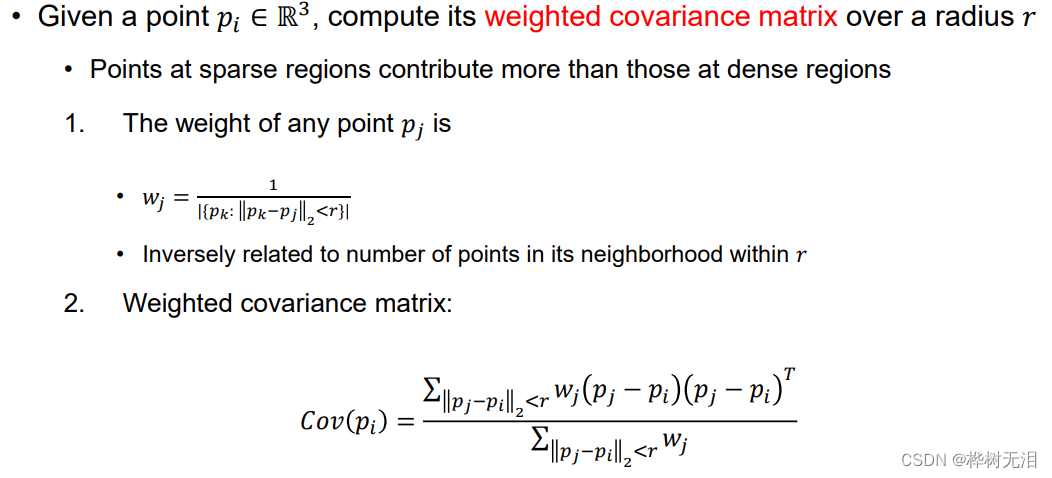
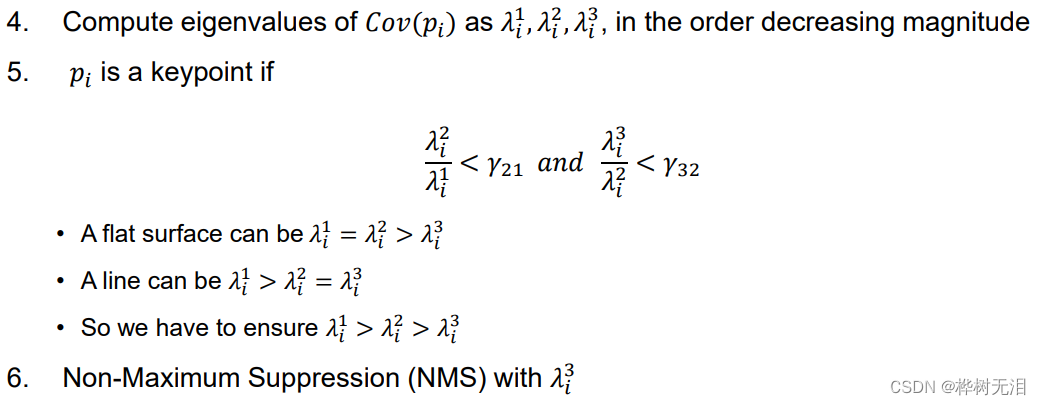
 2.2.2 PCA
2.2.2 PCA
三个方向点都很多的点是特征点
 传统方法对于噪声非常敏感,不能够使用
传统方法对于噪声非常敏感,不能够使用
2.3 深度学习特征提取
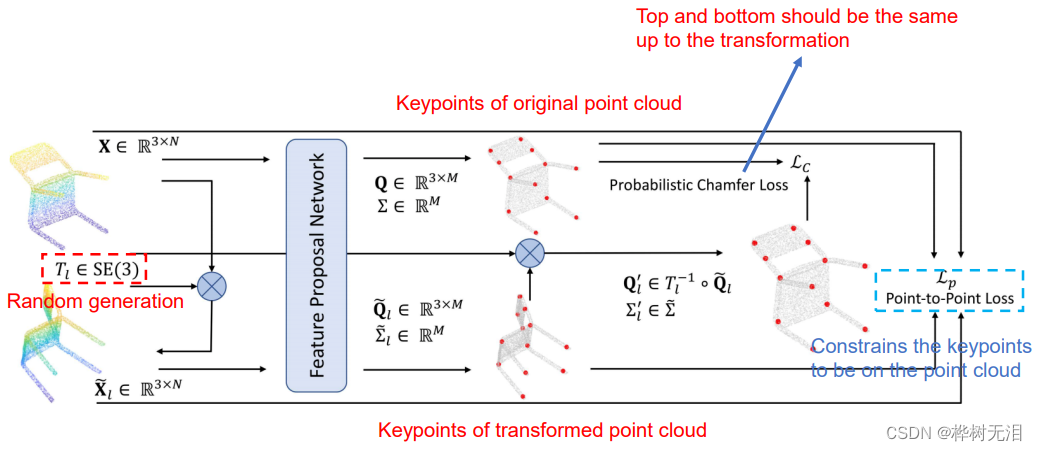
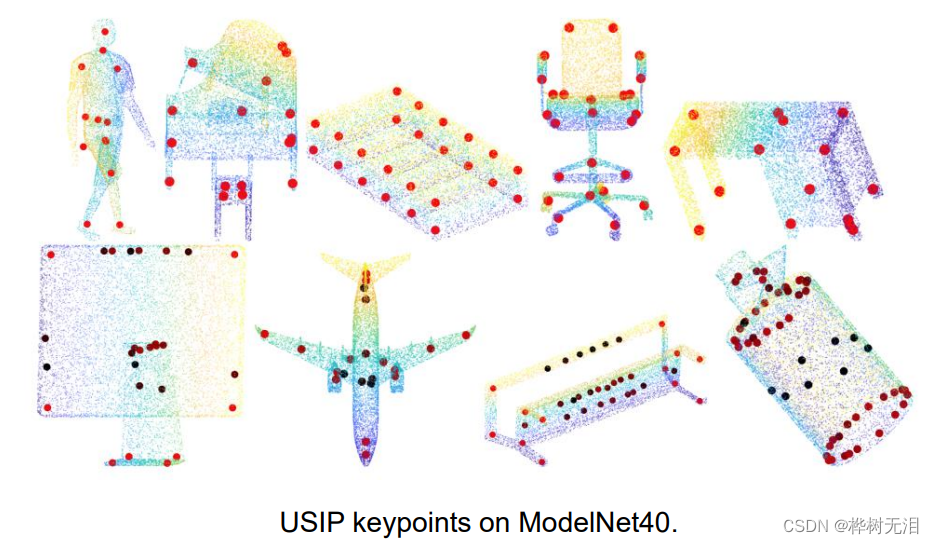
2.3.1 USIP
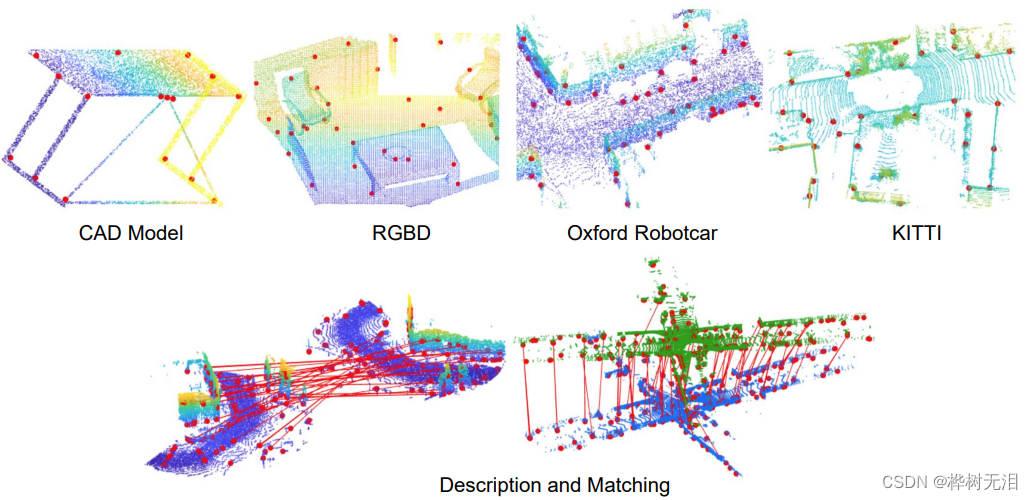 无监督学习: 1、特征点跟点云旋转无关 2、特征点跟尺度有关 限制了感知域
无监督学习: 1、特征点跟点云旋转无关 2、特征点跟尺度有关 限制了感知域
上一列是置信度高的,下一列是所有特征点
3. 特征点的描述
3.1 基于直方图
3.1.1 Histogram based
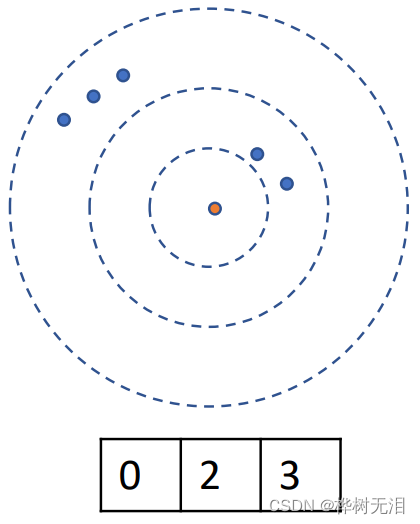
只关心点的距离,不关心点分布
3.1.2 Signature based
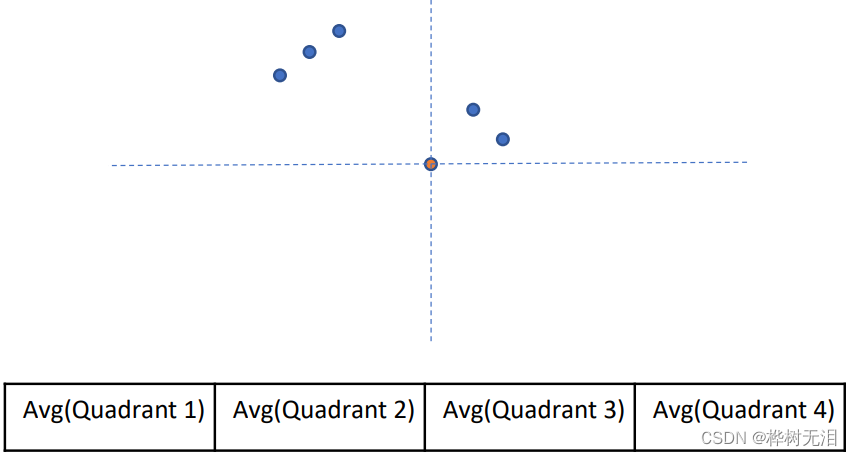
同一个东西做旋转,描述子就会变
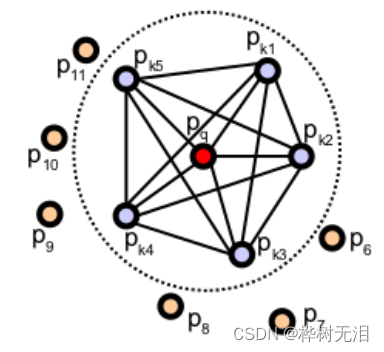
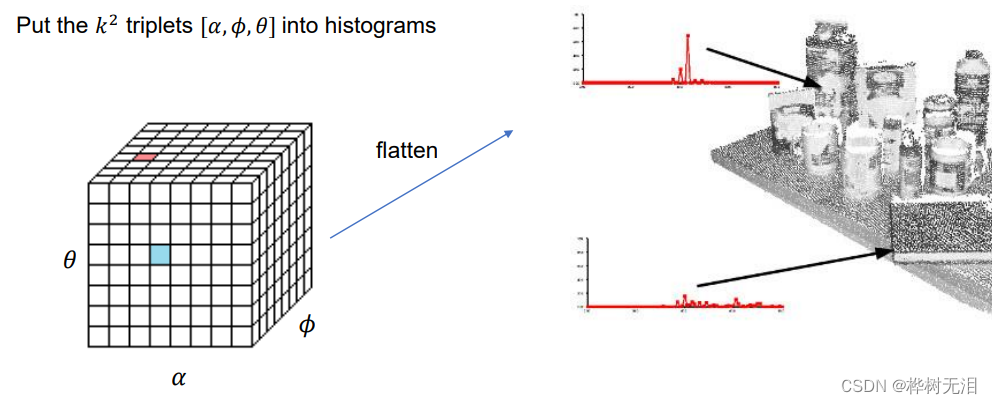
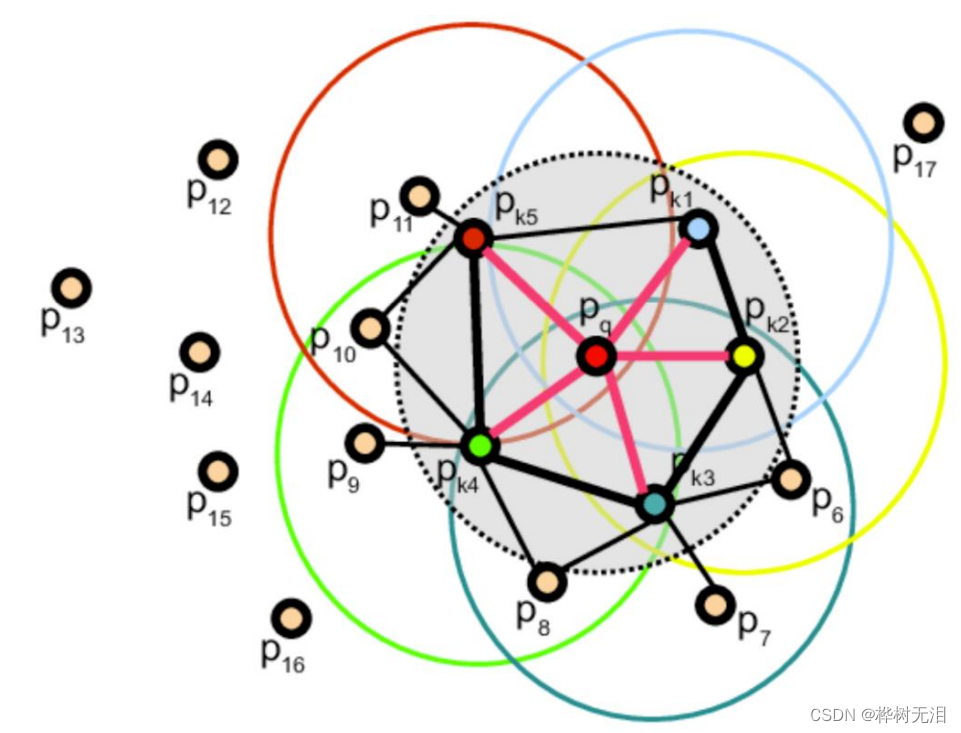
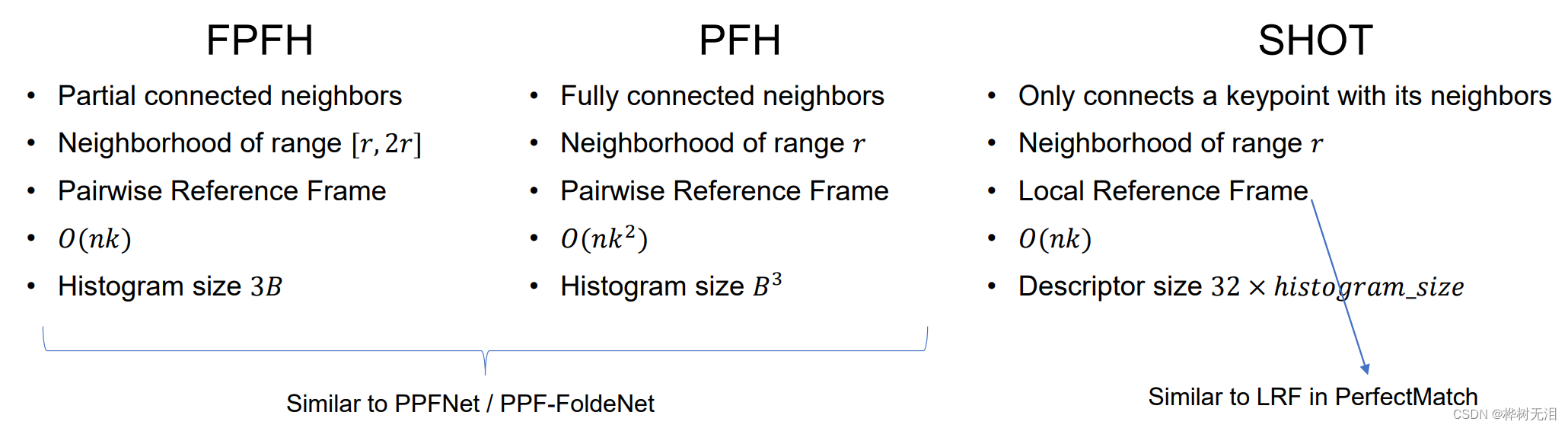
3.1.3 PFH
每个点与周围点之间的连线
1、建立坐标系
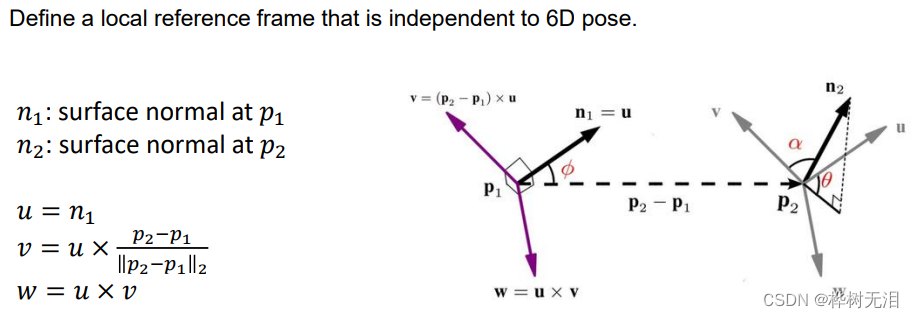
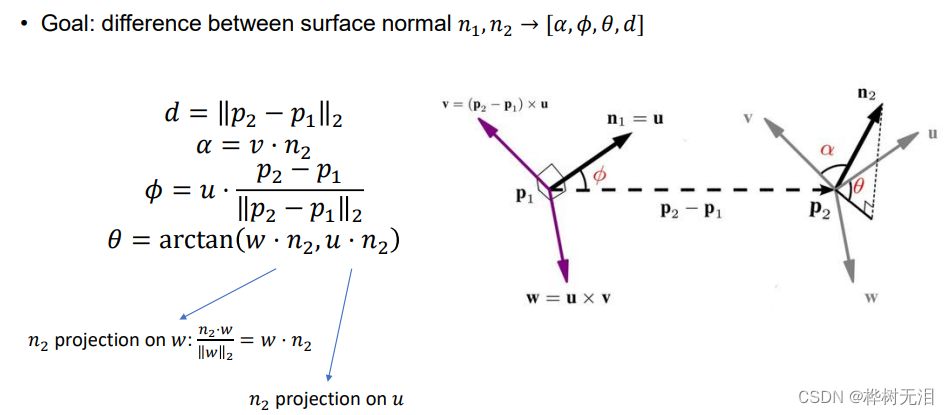
2、计算特征
表述特征点周围点的变化
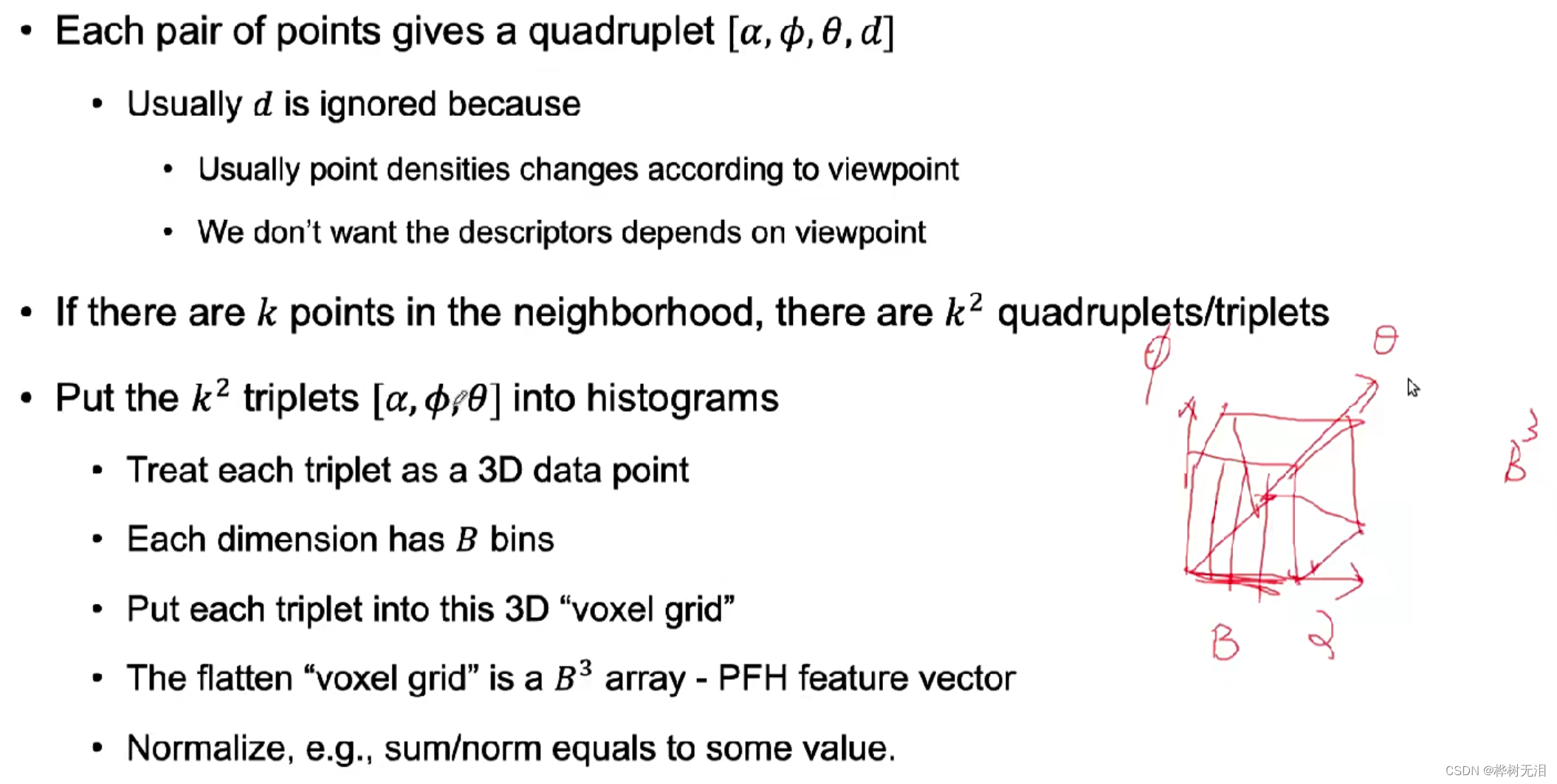
3、每个特征参数建立一个直方图
3.1.4 SPFH
只考虑特征点与周围点之间的连线,做出三个直方图
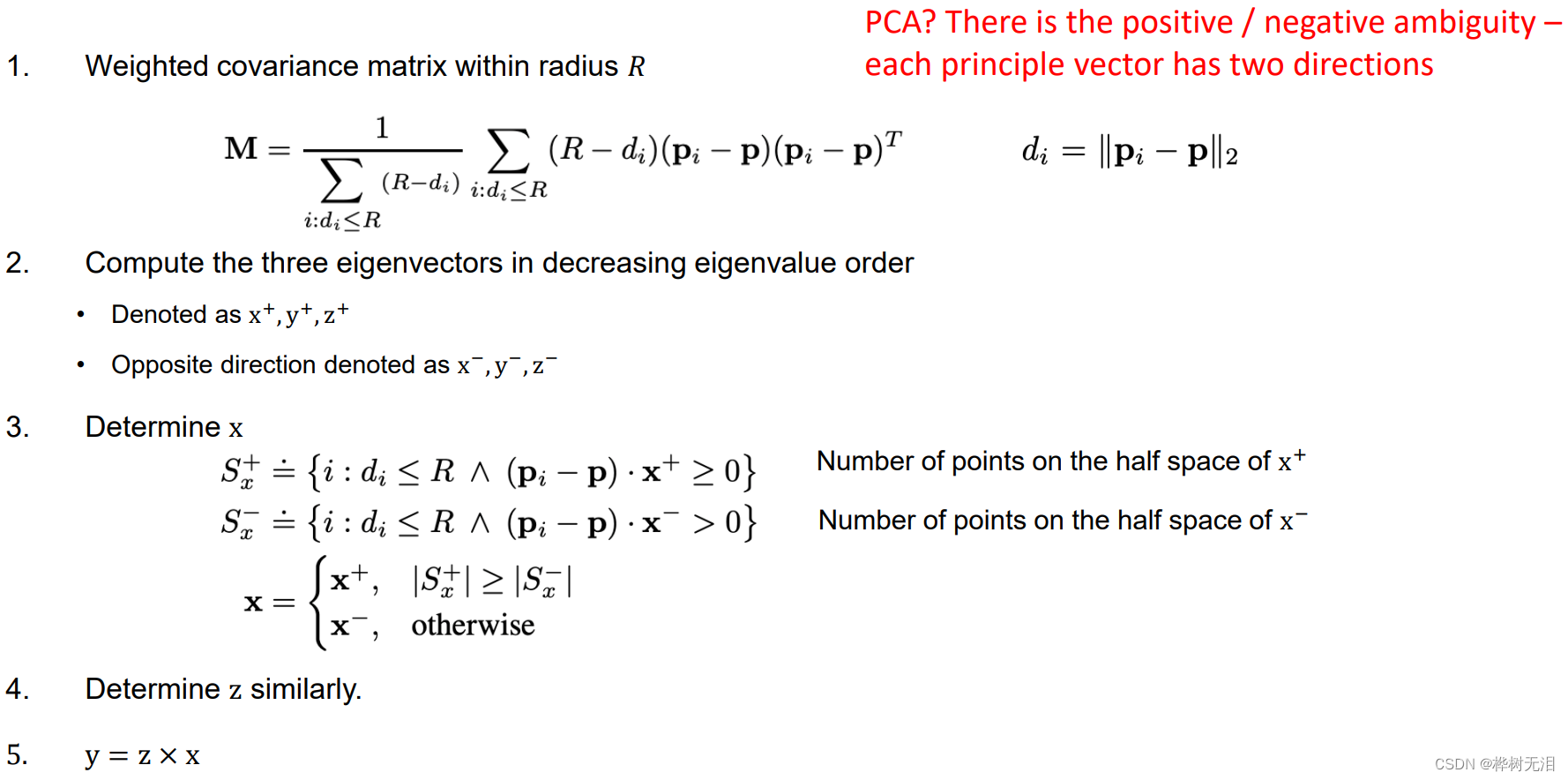
3.2 基于坐标系
3.2.1 SHOT
- 建立坐标系LRF
2. 将特征点周围空间分成32块
3. 计算每个小空间的直方图,每个直方图长度是11
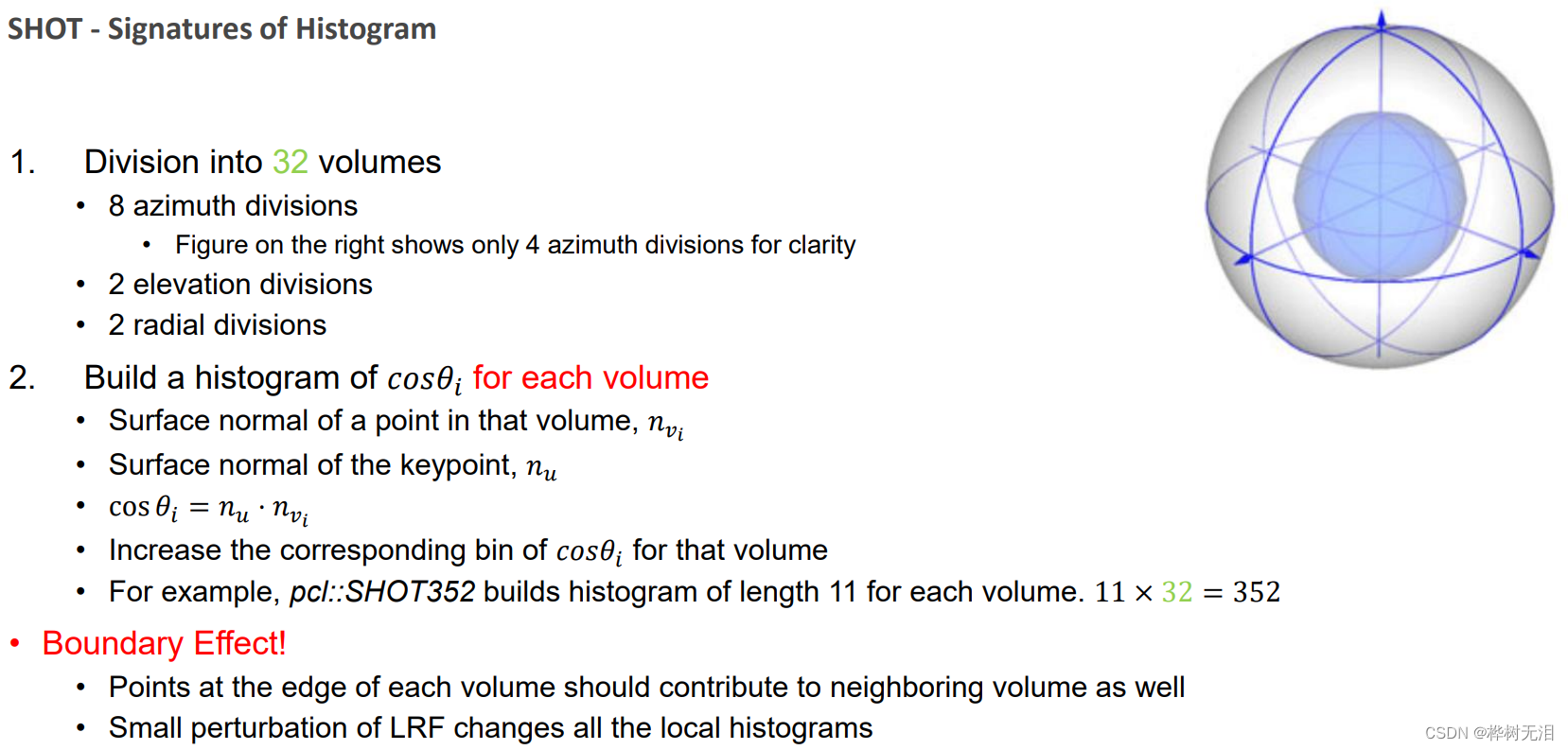
存在硬切割问题,对噪声不稳定,所以提出软切割。投票不直接加分非黑即白,而是变成线性插值的概率。
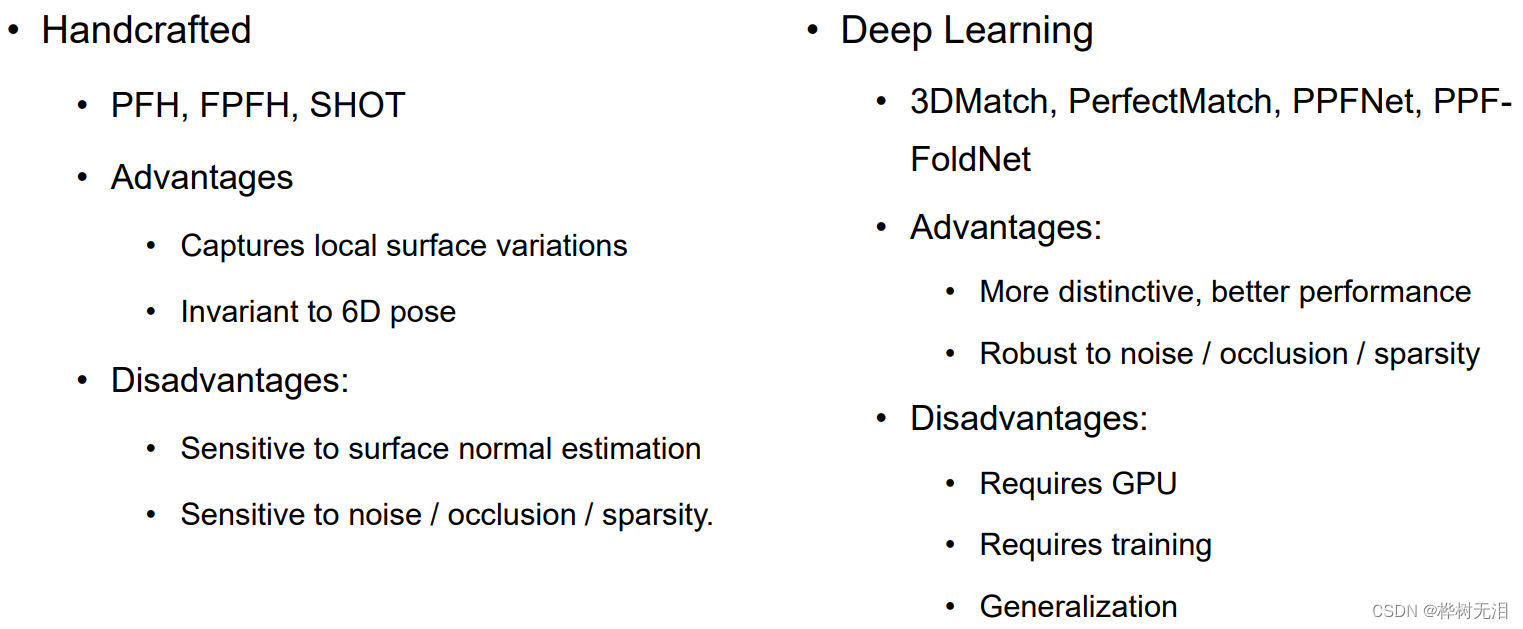
- 总结
3.3 深度学习描述
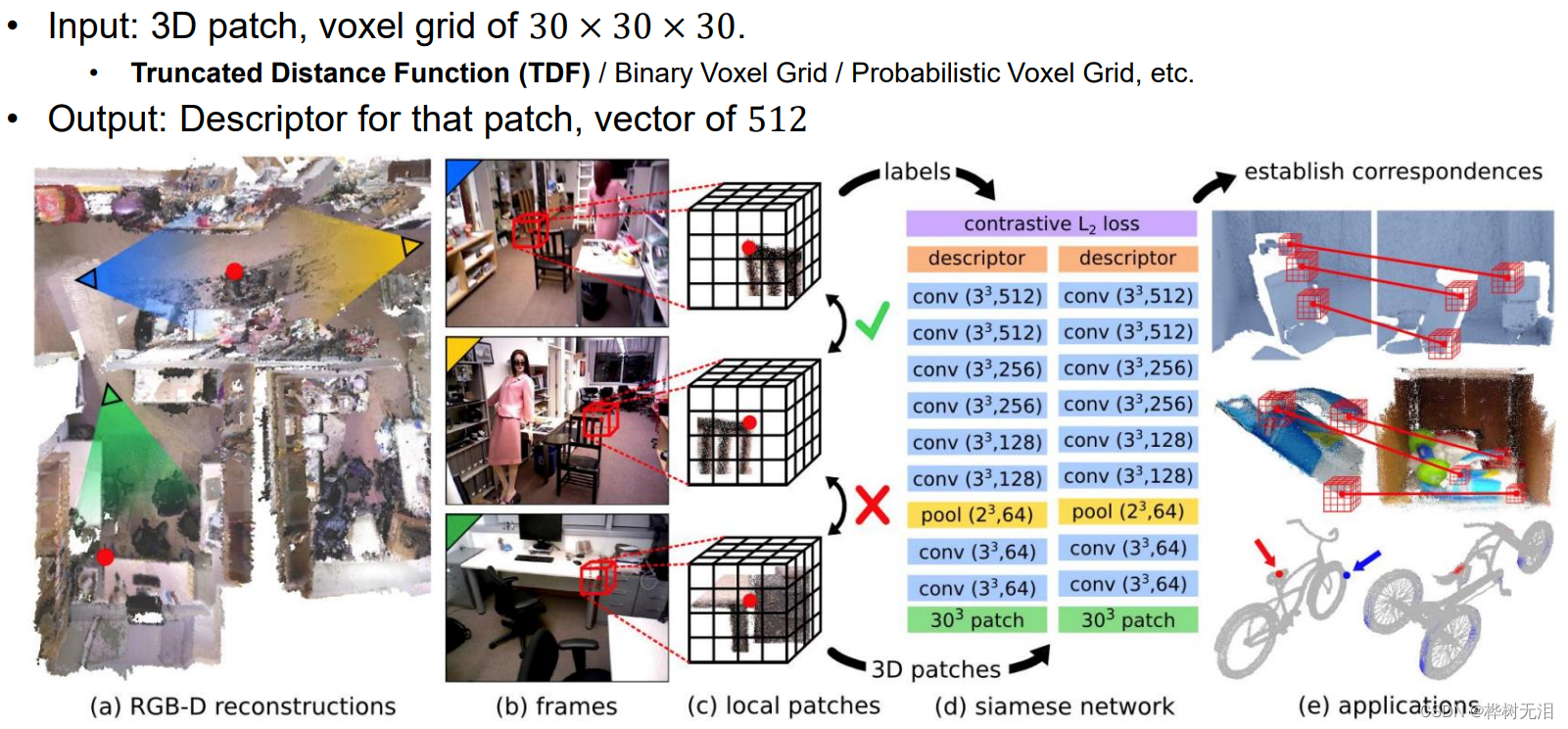
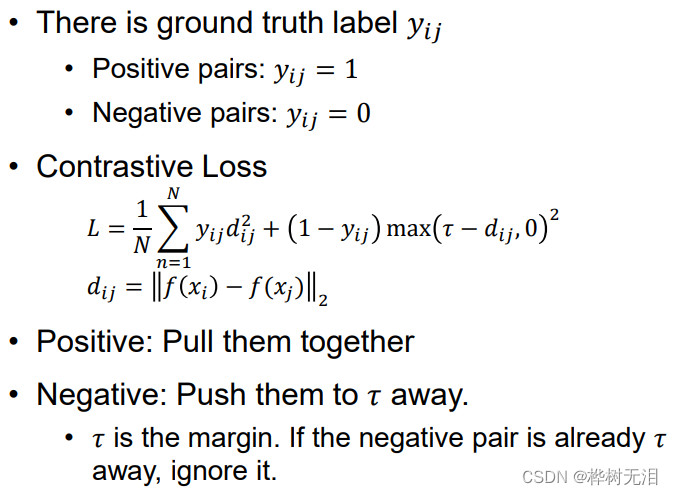
3.3.1 3DMatch
对三维网格点云进行卷积处理,三维网格建立在特征点周围
不同视角找到同一个地方,来避免随角度不同而不同
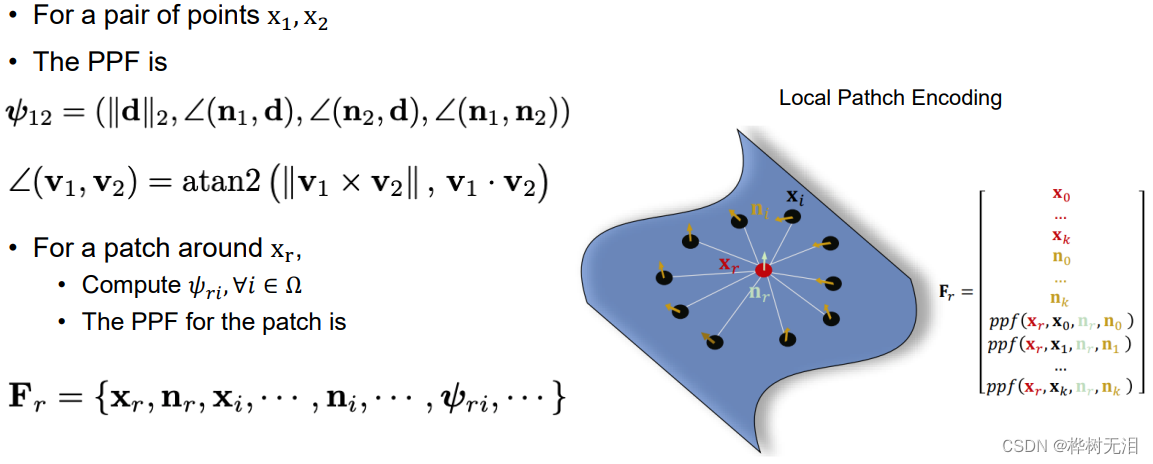
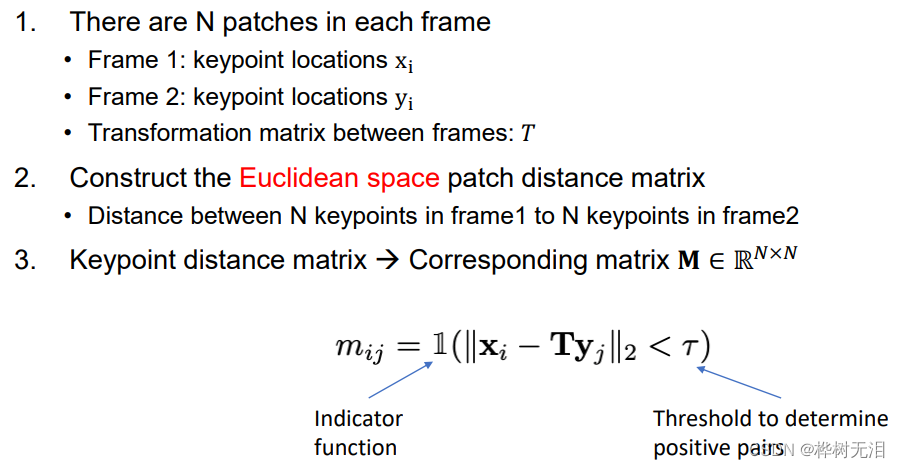
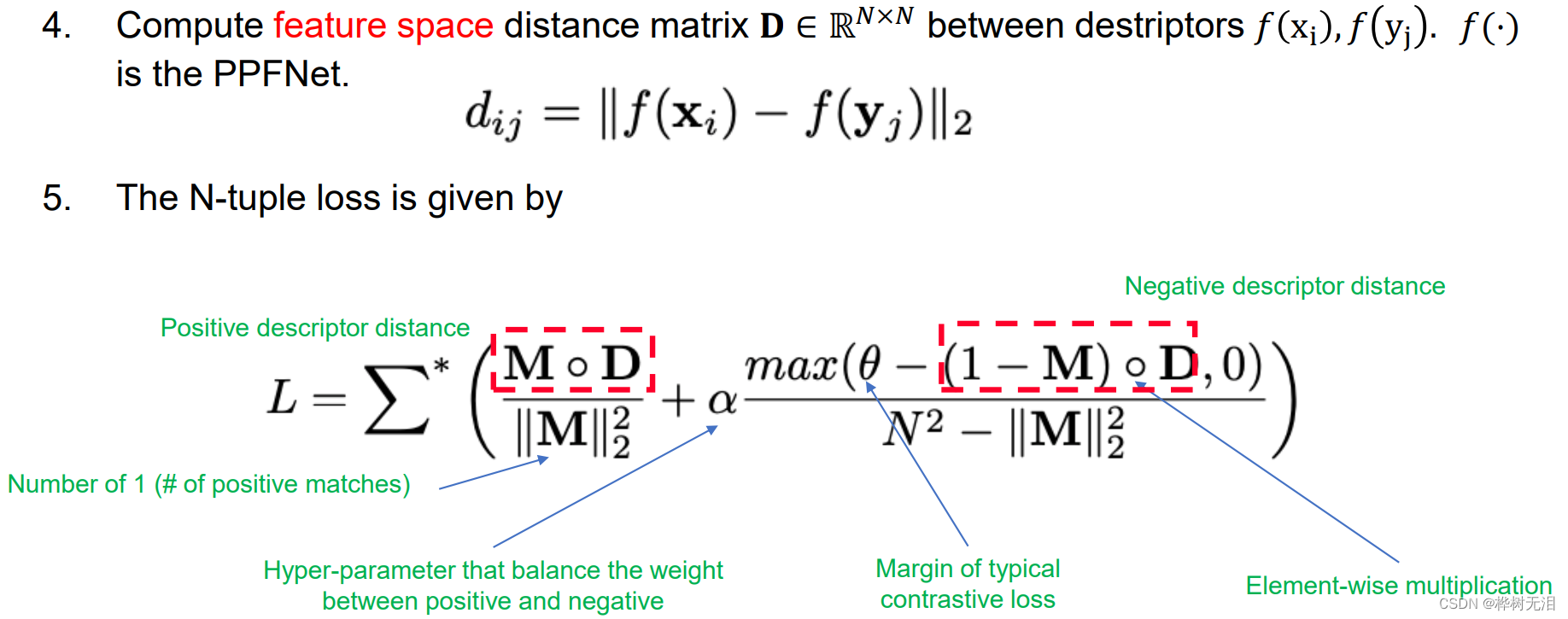
3.3.2 PPFNet
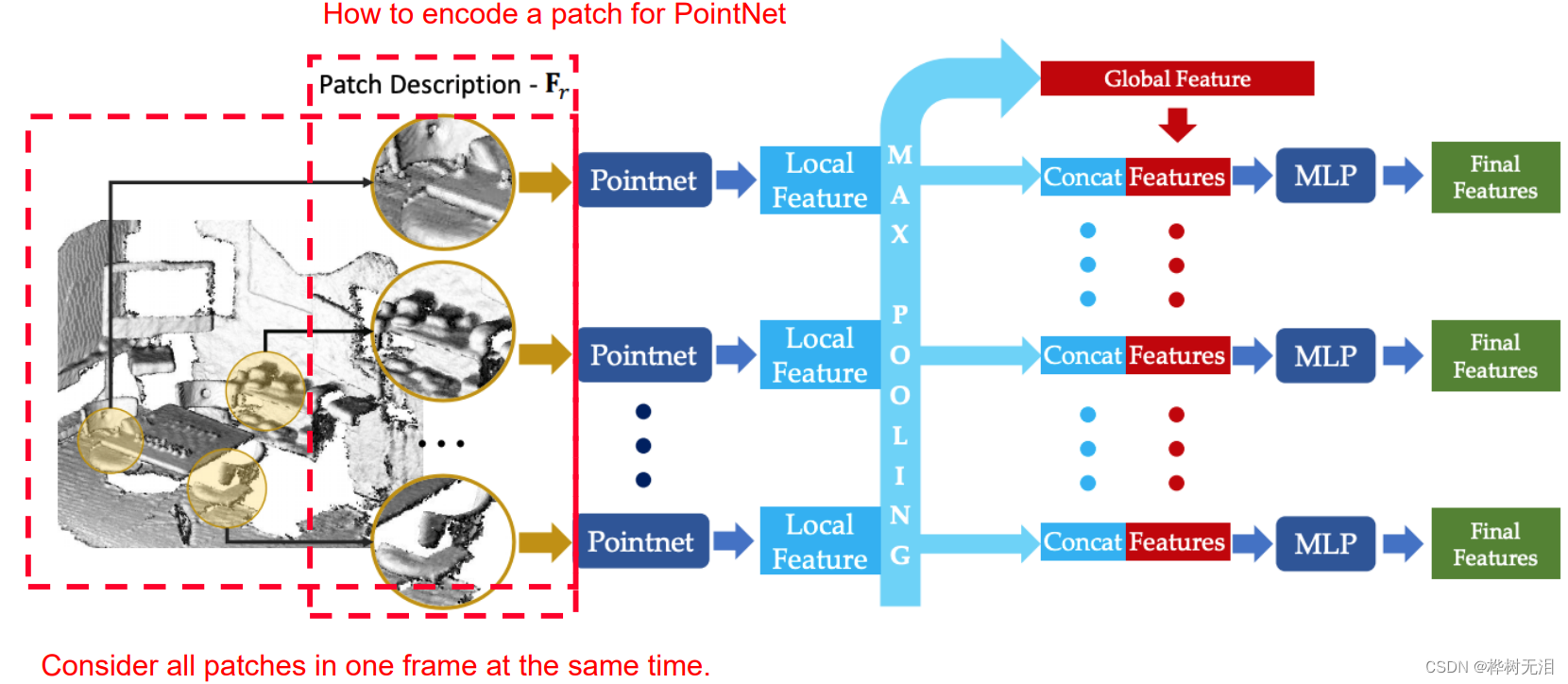
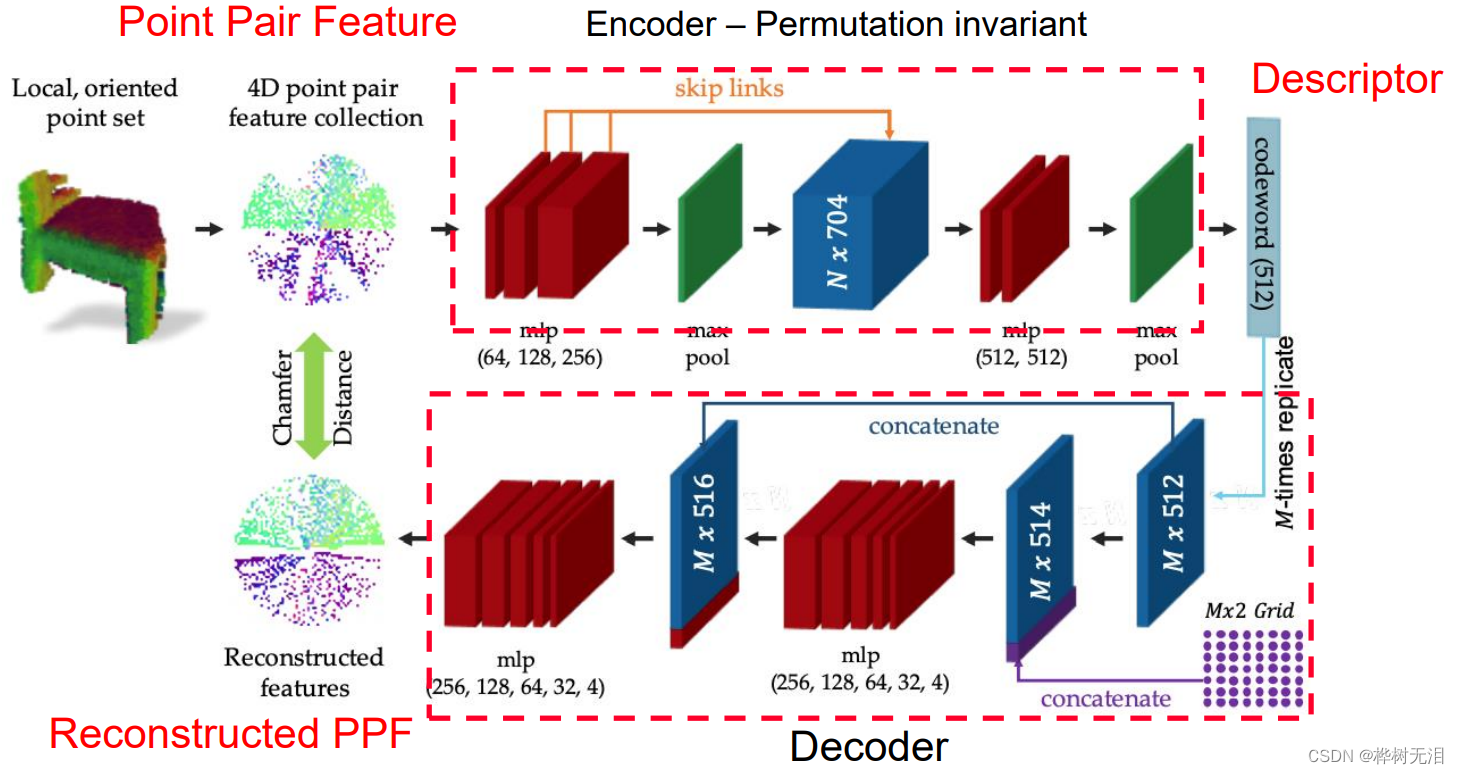
3.3.3 PPF-FoldNet


















 1836
1836

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











