







博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。
r2live是比较早的算法,编译过程有很多问题,通过以下两个博客可以解决
r2live process has died 问题解决了_required process [r3live_mapping-3] has died!-CSDN博客
我这里给出修改过的代码地址,不用修改直接编译
git@github.com:huashu996/r2live_ubuntu20.04.git
一、基础环境
- Ubuntu20.04
- ROS noetic
- Ceres Solver
- livox_ros_driver
二、编译
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/r2live.git
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash三、运行
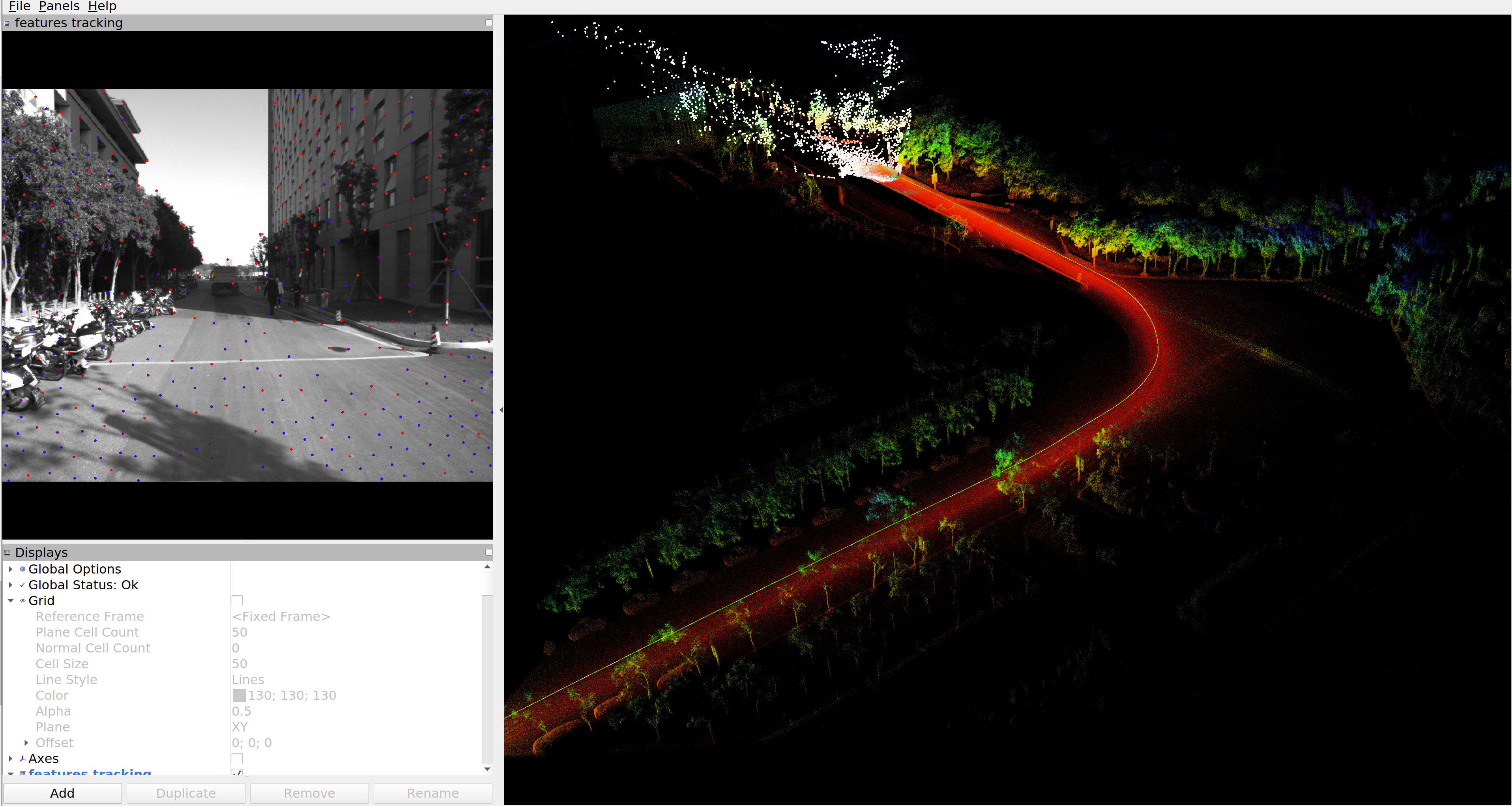
roslaunch r2live demo.launch
rosbag play YOUR_DOWNLOADED.bag
四、运行自己数据集
关于固态激光雷达和相机的数据集如何建立见之前跑r3live的博客
工程(十三)——从零用自己数据跑R3LIVE_r3live跑自己的数据-CSDN博客
下面只讲改哪些部分
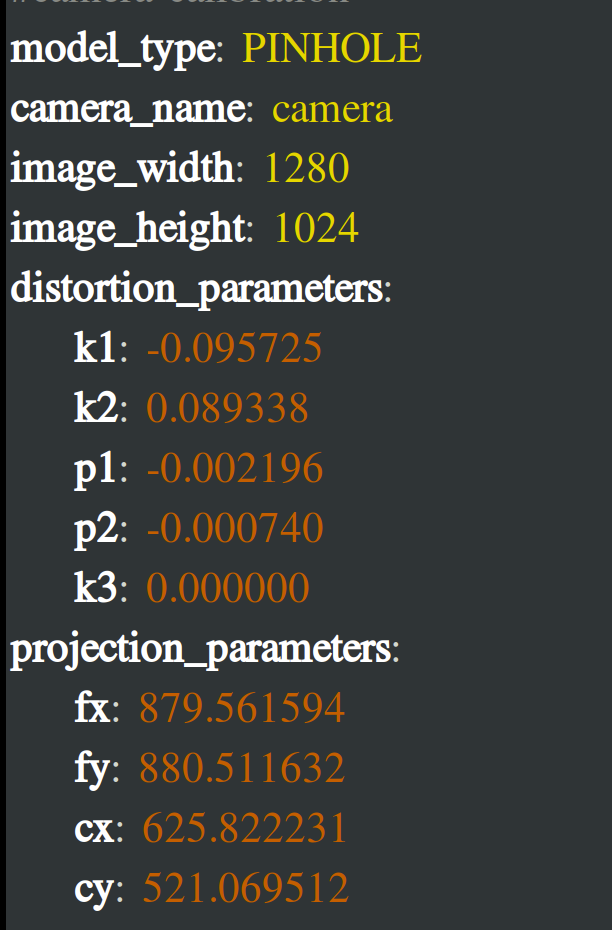
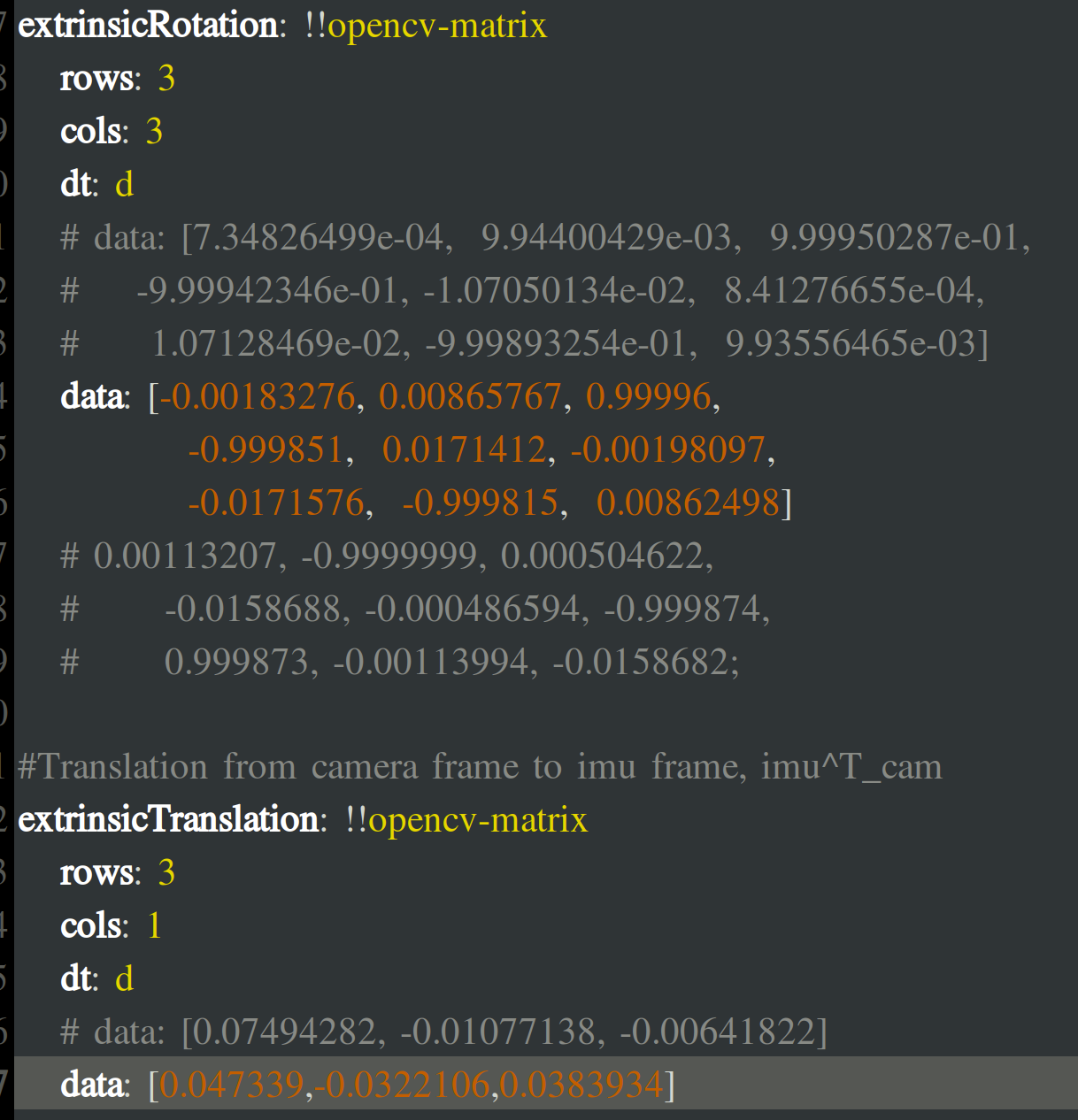
1.r2live/src/r2live/config/filr_cam.yaml
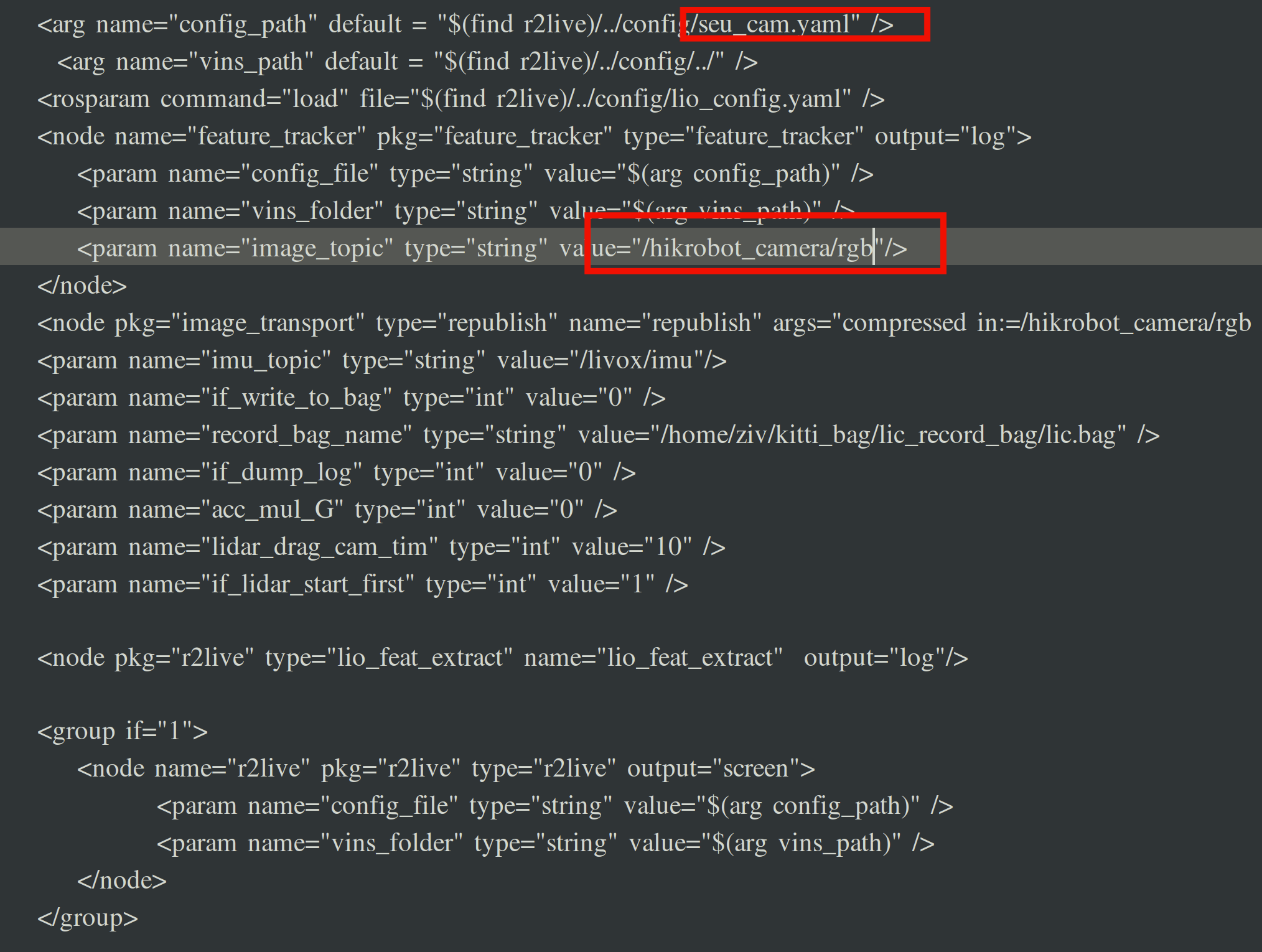
2.r2live/src/r2live/r2live/launch/seu.launch
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











