









1.1:控制字(ControlWord, 6040h)
控制字为两种字节长度,每Bit位控制功能如表1所示:
表1 控制字每Bit的功能表
| 15-11 | 10-9 | 8 | 7 | 6-4 | 3 | 2 | 1 | 0 |
| Manufacturer specific | Reserved | Halt | Fault reset | Operation mode specific | Enable operation | Quick stop | Enable voltage | Switch on |
Bit0:开机(1有效),Bit1:上电(1有效),Bit2:急停(0有效),Bit3:运行使能(1有效),Bit6-4:特殊运行模式位,Bit7:复位错误,Bit8:停止,Bit10-9:保留,Bit15-11:预留。
1.2:状态字(StatusWord、6041h)
状态字为两种字节长度,每Bit位功能如表2所示:
表2 状态字每Bit的功能表
| 0 | Ready to switch on(开机准备,1有效) |
| 1 | Switched on (开机,1有效) |
| 2 | Operation enabled(运行使能,1有效) |
| 3 | Fault(故障,1有效) |
| 4 | Voltage enabled(上电使能,1有效) |
| 5 | Quick(急停,1有效) |
| 6 | Switch on disabled(开机去使能,1有效) |
| 7 | Warning(报警,1有效) |
| 9-8 | Reserved(预留) |
| 10 | Target reached(目标到达,1有效) |
| 11 | Internal limt active(内部限制) |
| 13-12 | Operation mode specific(特殊运行模式) |
| 15-14 | Reserved(预留自定义) |
1.3:运行模式(Mode of Operation,6060 h)
运行模式为一个字节长度,对应值的功能如表3所示:
表3 运行模式值功能表
| -128- -1 | Manufacturer-specific operation modes | -- |
| 0 | No mode change/no mode assigned | -- |
| 1 | Profile position mode | pp |
| 2 | Velocity mode | vl |
| 3 | Profile velocity mode | pv |
| 4 | Torque profile mode | tp |
| 5 | reserved | -- |
| 6 | Homing mode | hm |
| 7 | Interpolated position mode | ip |
| 8 | Cyclic sync position mode | csv |
| 9 | Cyclic sync velocity mode | csp |
| 10 | Cyclic sync torque mode | cst |
| 127-11 | reserved | -- |
1:位置规划模式 (Profile Position Mode)
驱动器接受上位控制器传送的位置命令后,控制伺服电机到达目标位置。此模式下,上位控制器仅于开始时给予驱动器目标位置、速度命令与加减速等设定。从命令触发到到达目标位置间的运动规划,皆由驱动器运动命令产生器规划执行。
2:速度模式 (Velocity Mode)
上位控制器将速度命令、加减速等信息下给驱动器,由驱动器进行速度控制相关行为。
3:速度规划模式 (Profile Velocity Mode)
上位控制器将目标速度、加速度、减速度发送给伺服驱动器,速度、转矩调节由伺服内部执行。
4:转矩规划模式 (Profile Torque Mode)
驱动器接受上位控制器传送的转矩命令后,控制马达到达目标转矩。此模式下,上位控制器给定目标转矩、转矩曲线等设定。由驱动器运动命令产生器规划执行。
5:reserved
6:原点复归模式 (Homing Mode)
原点复归目的为建立驱动器的坐标系。坐标系建立后,驱动器即可执行上位控制器下达的位置命令。驱动器支持 CiA402 规范定义之 35 种归原点模式,包含找寻原点开关、正负极限与 Z 脉波等模式。
7:位置补间模式 (Interpolated Position Mode)
根据上位控制器生成指令位置,根据通信周期在伺服驱动器内部缓冲,根据插补时间更新缓冲后的指令位置进行动作的位置控制模式。
8:周期同步位置模式 (Cyclic Synchronous Position Mode)
上位控制器在周期同步位置模式下规划路径并定期发送 PDO。此模式中,上位机传送每笔 PDO 时,会同时传送目标位置 (target position:607Ah) 与控制指令 (controlword) 的数据至驱动器。
9:周期同步速度模式 (Cyclic Synchronous Velocity Mode)
上位控制器在周期同步速度模式下规划速度并定期发送 PDO。此模式中,上位机传送每笔 PDO 时,会同时传送目标速度 (target velocity:60FFh) 与控制指令 (controlword) 的数据至驱动器。
10:周期同步转矩模式 (Cyclic Synchronous Torque Mode)
上位机在周期同步转矩模式下规划扭矩。在此模式中,上位机传送每笔 PDO 时,会同时传送目标扭矩
1.4:状态机
伺服运动的状态机跳转变化图如图1所示。
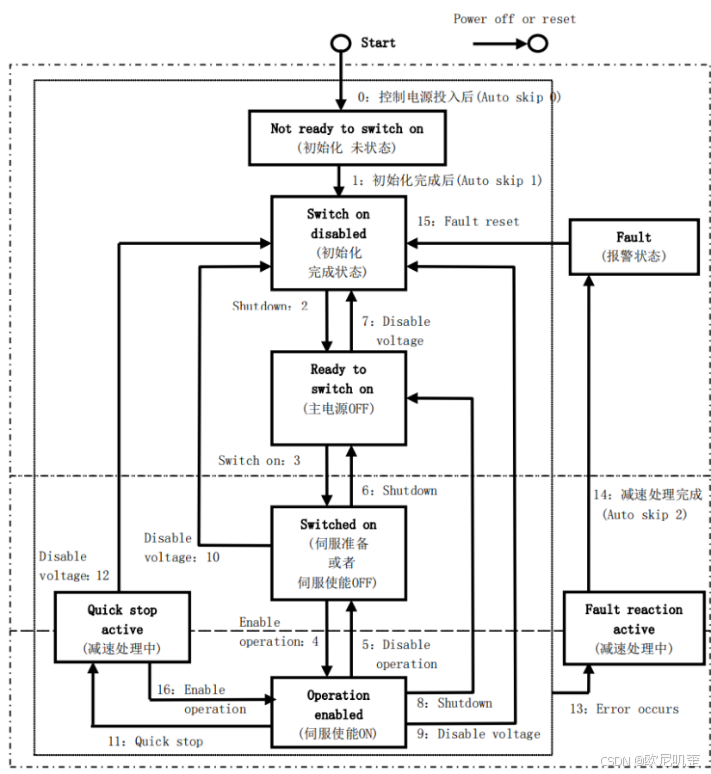
图1 伺服运动的状态机跳转图
状态机每个状态对应的状态字如表4所示
表4 状态机每个状态对应的状态字
| State | Statusword |
| Not ready to switch on | xxxx xxxx x0xx 0000b |
| Switch on disabled | xxxx xxxx x1xx 0000b |
| Ready to switch on | xxxx xxxx x01x 0001b |
| Switched on | xxxx xxxx x011 0011b |
| Operation enabled | xxxx xxxx x011 0111b |
| Quick stop active | xxxx xxxx x00x 0111b |
| Fault reaction active | xxxx xxxx x0xx 1111b |
| Fault | xxxx xxxx x0xx 1000b |
控制状态机每个状态之间的状态跳转的控制字如表5所示
表5 状态机跳转的控制字对应表
| Command | Bit of the controlword | |||||
| Fault reset | Enable operation | Quick stop | Enable voltage | Switch on | Transitions | |
| Shutdown | 0 | x | 1 | 1 | 0 | 2,6,8 |
| Switch on | 0 | 0 | 1 | 1 | 1 | 3 |
| Switch on + enable operation | 0 | 1 | 1 | 1 | 1 | 3+4 |
| Disable voltage | 0 | x | x | 0 | x | 7,9,10,12 |
| Quick stop | 0 | x | 0 | 1 | x | 7,10,11 |
| Disable operation | 0 | 0 | 1 | 1 | 1 | 5 |
| Enable operation | 0 | 1 | 1 | 1 | 1 | 4,16 |
| Fault reset | ↑ | x | x | x | x | 15 |
2 伺服控制
2.1 伺服电机上使能
利用PDO映射控制字和状态字实现伺服上使能流程图如图2所示:
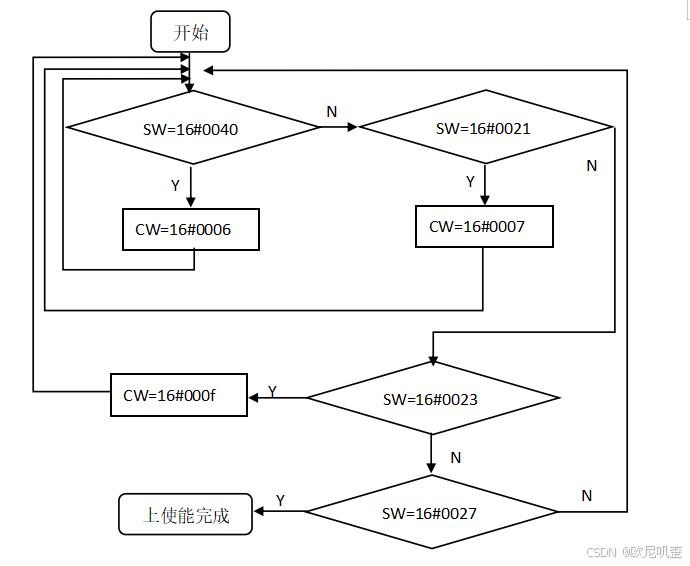
图2 上使能流程图
对伺服设备EtherCAt I/O映射端口的Control Word和Status Word 进行映射变量,Control Word的映射变量为CW,Status Word的映射变量为 SW。通过配合操作CW和SW即可实现对伺服电机的上使能(Enable operation)。
2.2 伺服电机下使能
利用PDO映射控制字和状态字实现伺服下使能流程图如下:
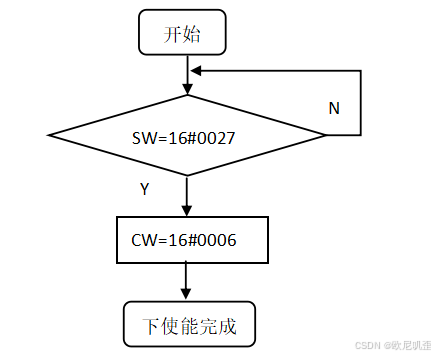
图2 下使能流程图
PDO映射同上使能,然后通过配合操作CS和WS即可实现对伺服电机的下使能
2.3 伺服csp运行模式控制步骤
第一步:对伺服的Modes of operation,Target position和Position actual value 通道进行映射。
第二步:对Modes of operation通道映射值进行赋值为8(csp运动模式)。
第三步:获取 Position actual value 通道映射的数值大小。
第四步:对期望位置和伺服当前位置进行运动位置轨迹插补运算。
第五步:把插补规划好的目标位置以周期性同步的方式对Target position通道进行赋值映射,即可实现伺服在csp模式下伺服的运动控制。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









