






一、基于平行视图的双目立体视觉
1.平行视图相关性质

对F矩阵进行改造

F与另一个极点、两个相机内参数以及相机间的旋转有关系
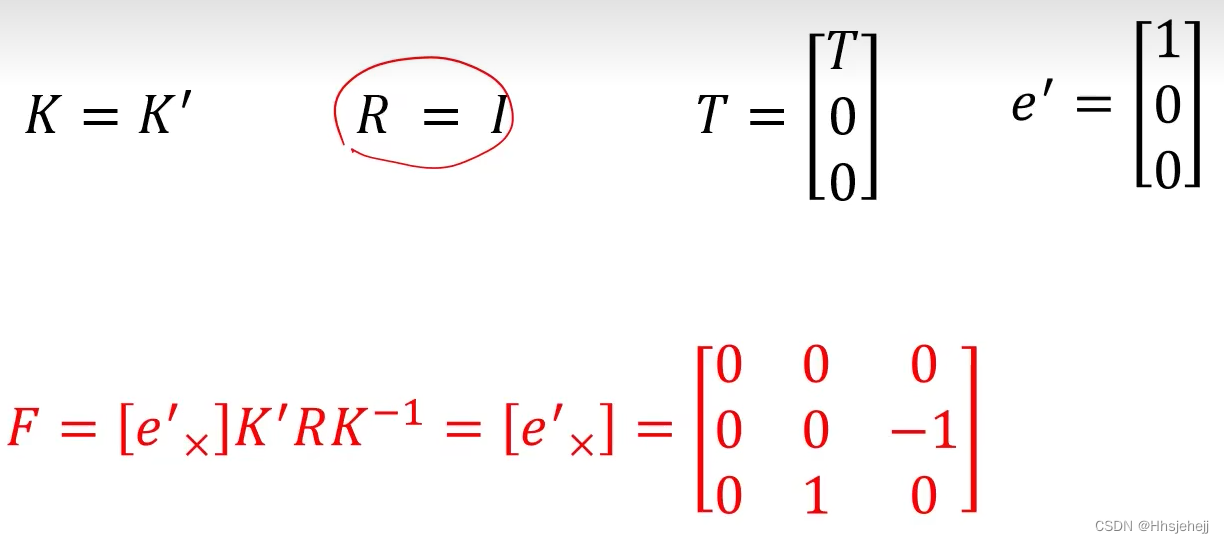
因为是平行视图所以不存在旋转,K=K‘ ,极点e'为无穷远点。

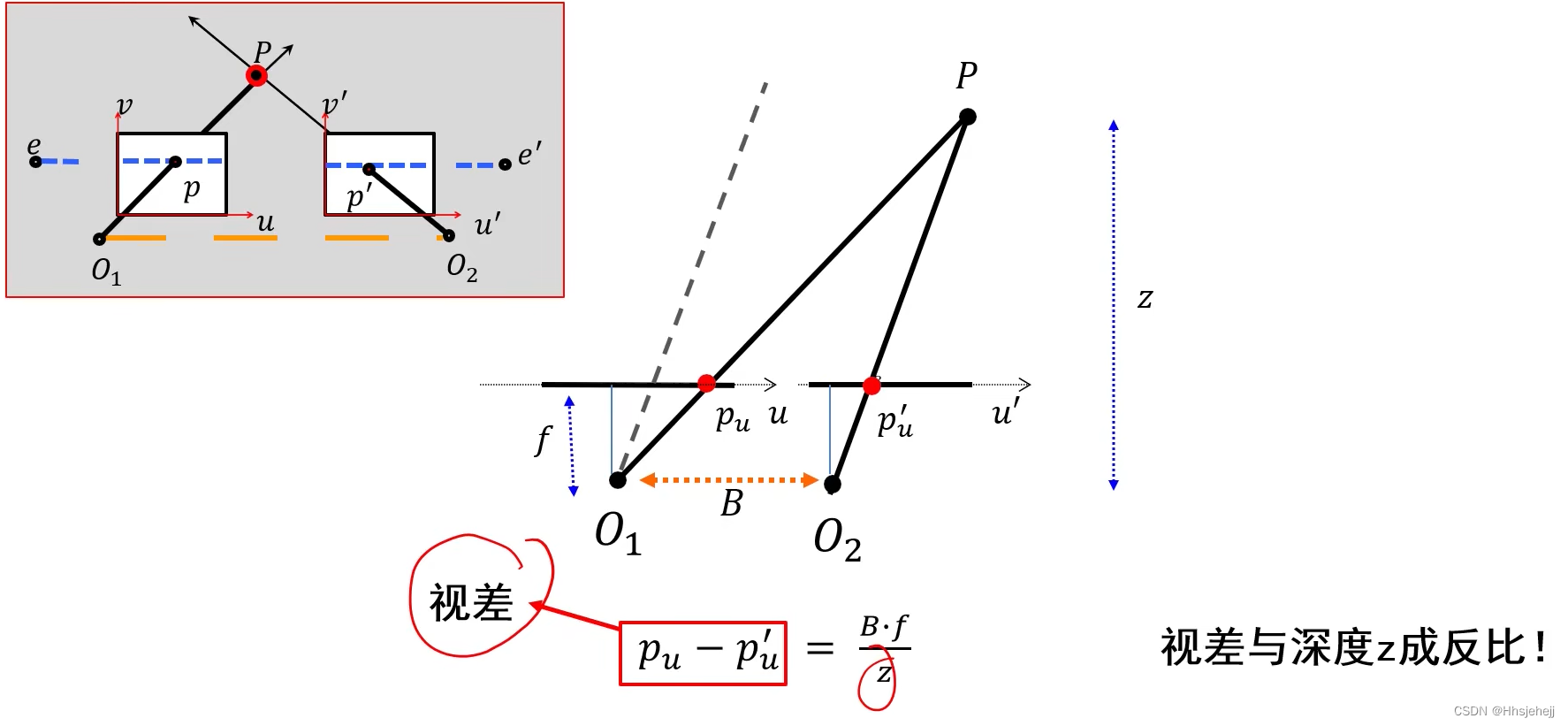
第一个视图的极线 l 的方程为y=pv’,极线为水平线且平行于u轴

p和p‘的v坐标一样。
结论:
1.极线是水平的且平行于u轴。
2.极点位于无穷远。
3.p和p’的v坐标一样
4.p'点沿着扫描线搜索即可
2.平行视图的三角测量
引出两个核心问题:
1.如何或者平行视图:图像校正
2.如何建立对应点之间的关系:对应点搜索
二、图像校正

步骤:
第一步、1.在两幅图像I和I'找到一组匹配点pi pi‘,不少于8个
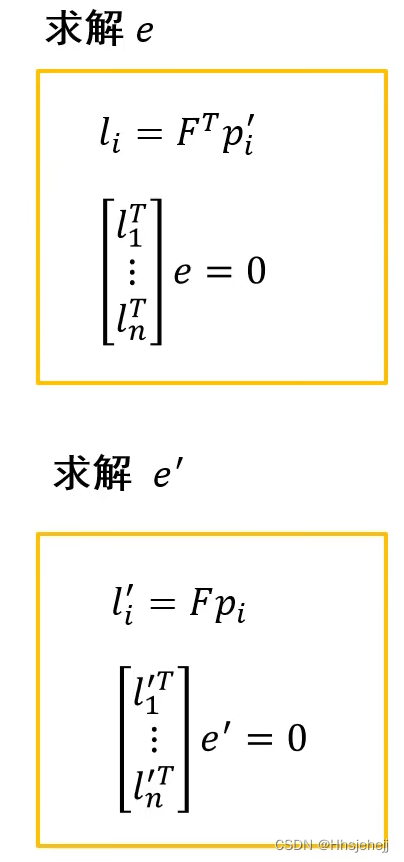
第二步、计算基础矩阵F,求解极点e和e’
第三步、3.选择透视变换H将e'映射到无穷远点(f,0,0)

第四步、寻找对应的透视变换矩阵H使得下式最小
第五步、分别使用矩阵H和H',对两幅图进行重采样。
总结:

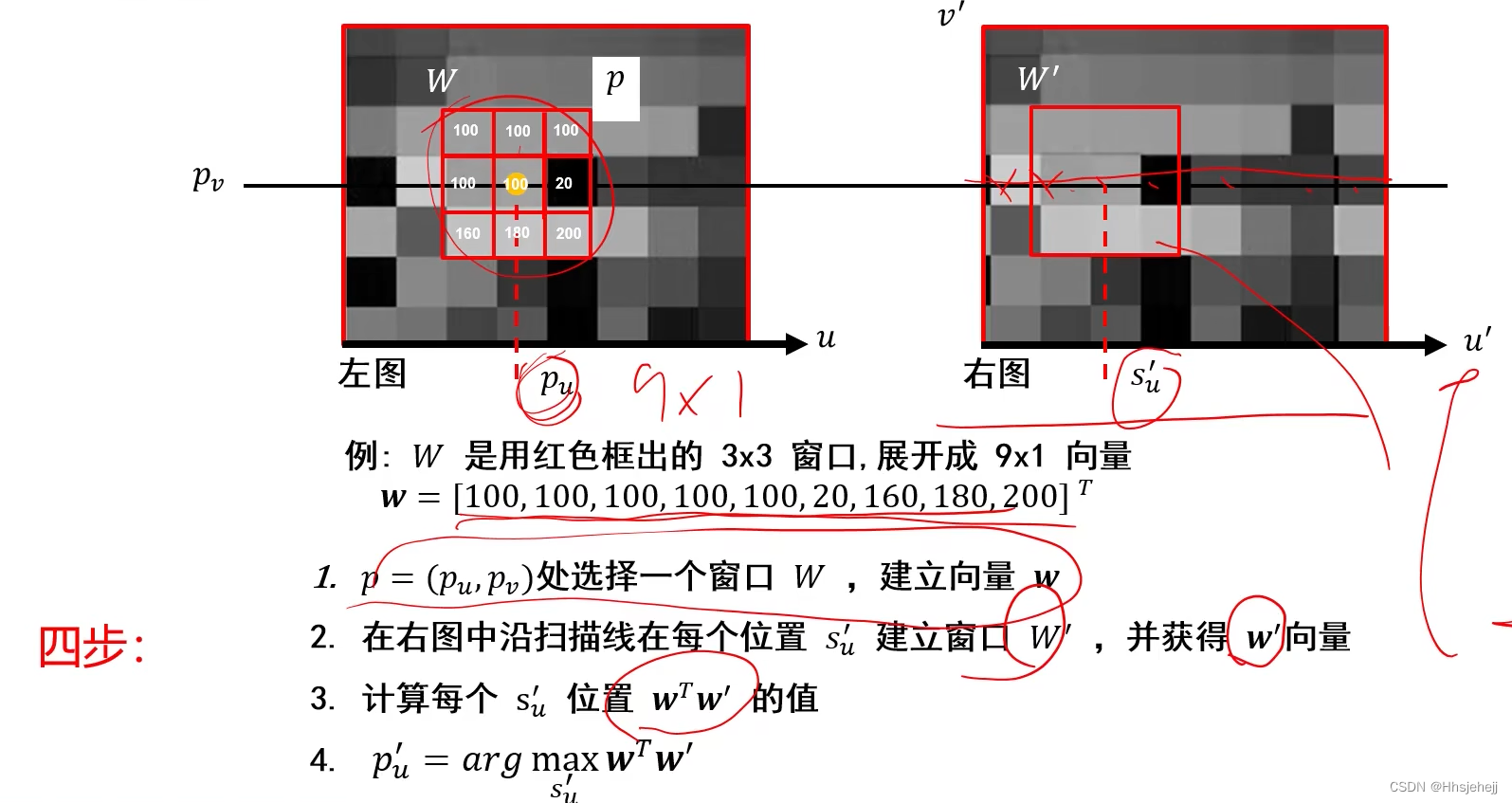
三、对应点搜索
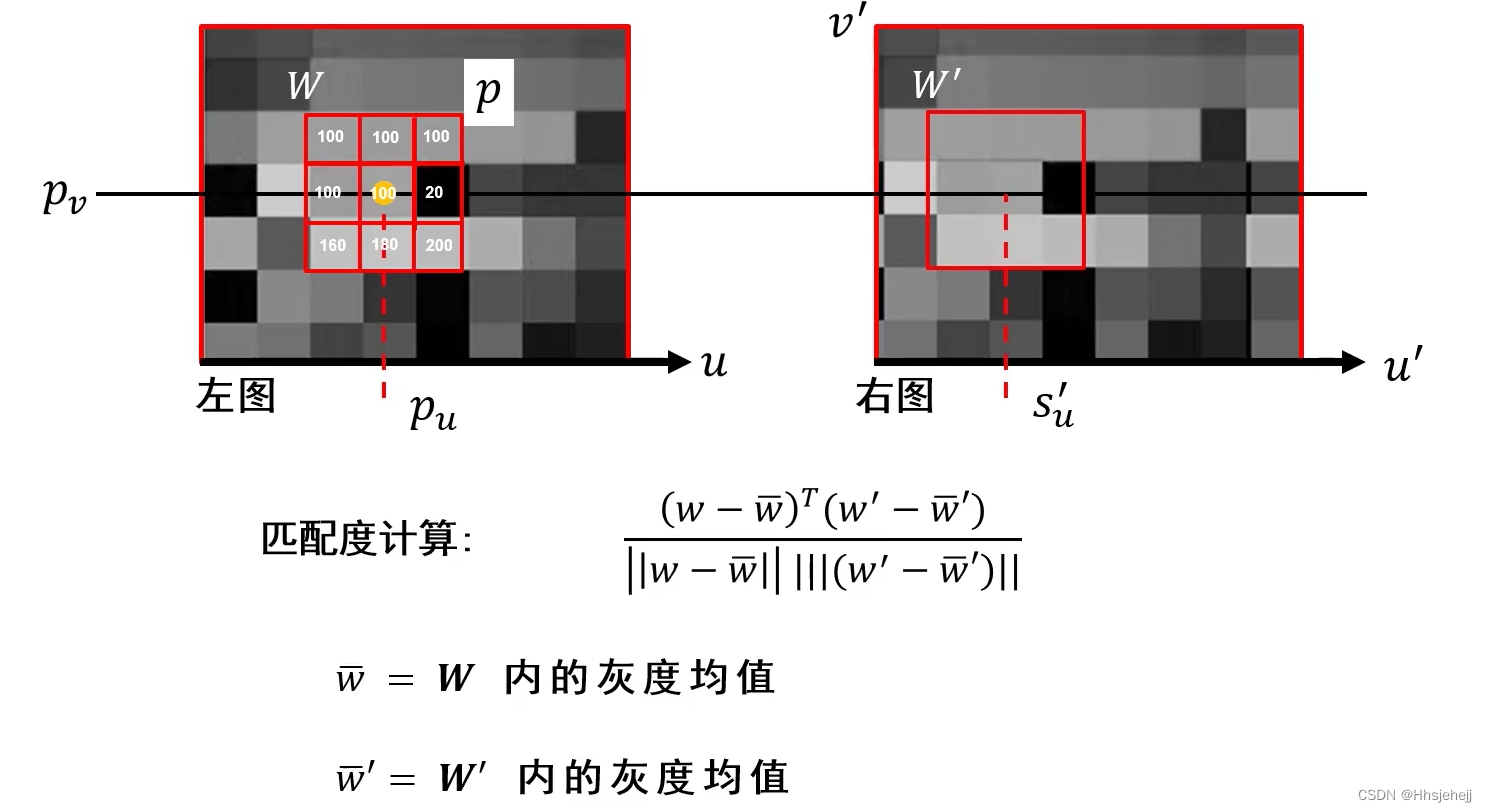
1.相关匹配法
问题:亮度/曝光度发生变化,导致灰度发生巨大改变
改进:归一化相关匹配法

窗口大小的影响:
较小的窗口
1.细节丰富
2.更多噪声
较大的窗口
1.视图差更平滑、噪声更少
2.细节丢失
存在更好的方法:图像分割法(Graph cuts)
https://legacy.sites.fas.harvard.edu/~cs278/papers/bvz.pdf
问题:
1.
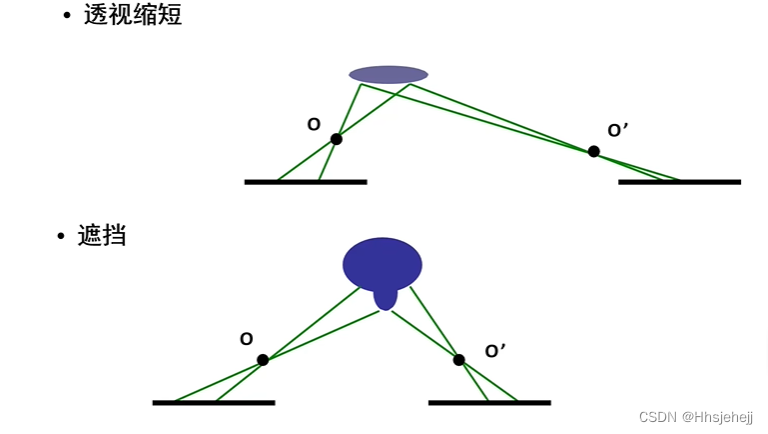
2.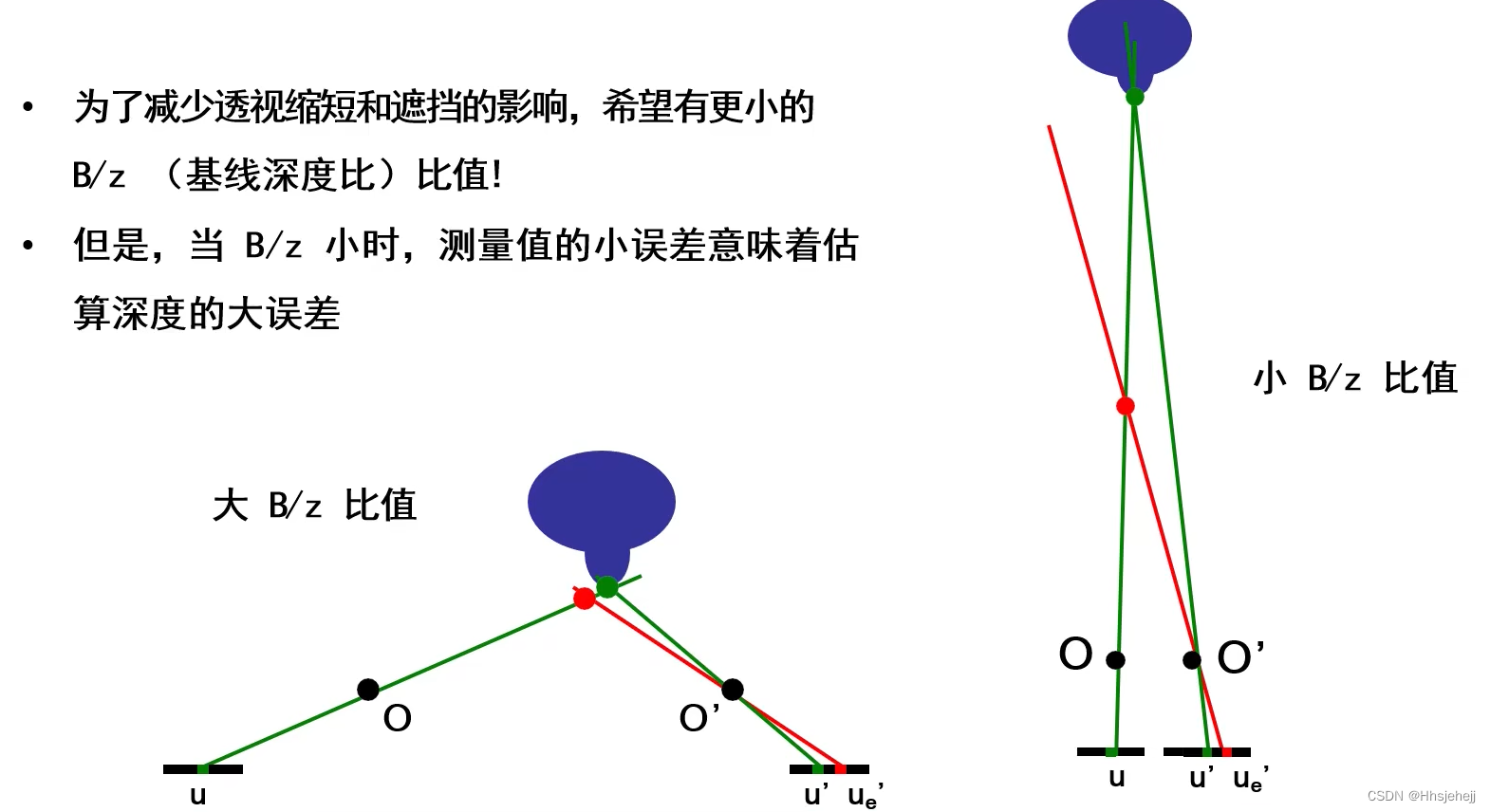
3.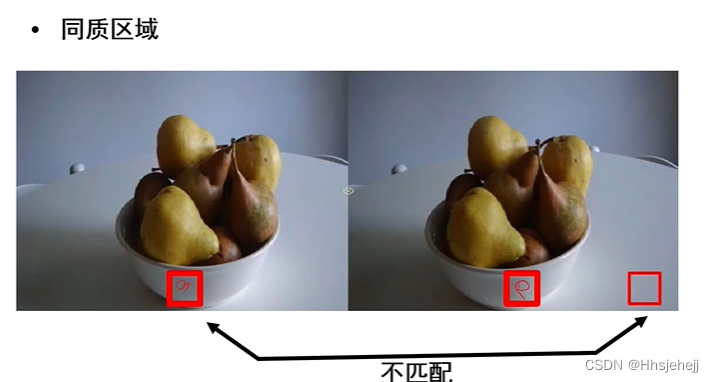
4.















 1380
1380











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









