







光-机-电-材-热-信-控-软-网-算-智:跨学科技术体系全景解析
现代复杂工程系统已进入“多技术域深度耦合”时代,需通过光、机、电、材、热、信、控、软、网、算、智十一大技术支柱的协同创新实现突破。以下从技术内涵、协同关系、典型案例、未来趋势四个维度展开系统性分析。
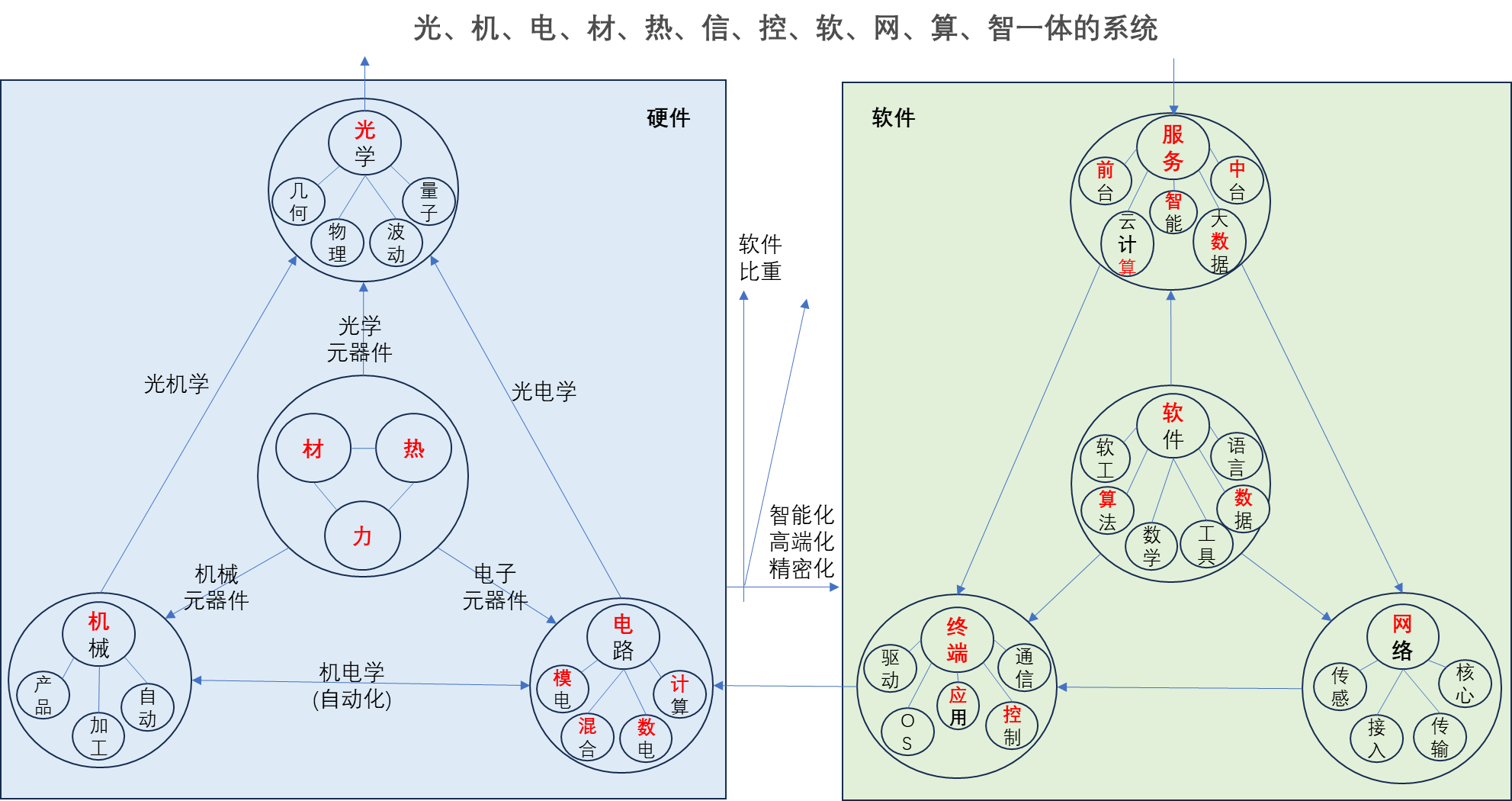
一、技术支柱核心定位与关联图谱
1. 技术体系分层架构
| 层级 | 技术支柱 | 核心价值 |
|---|---|---|
| 基础层 | 材、热、光、机、电 | 构建物理实体,实现能量/物质转换与传递(如激光器需光学腔体+冷却系统+供电电路) |
| 感知层 | 信、控 | 采集环境数据并转化为可执行指令(如毫米波雷达信号→目标检测→车辆制动控制) |
| 计算层 | 算、软 | 处理海量数据并优化决策(如AI算法解析摄像头图像→路径规划→电机驱动指令生成) |
| 网络层 | 网、智 | 实现分布式协同与自主进化(如车联网V2X通信+联邦学习实现交通流全局优化) |
2. 技术协同关系矩阵
通过“输入-处理-输出”逻辑构建技术域交互网络:
- 材 → 光/机/电:新型半导体材料(如氮化镓)提升激光器效率与芯片算力密度
- 热 → 控/算:液冷系统保障AI服务器在40℃环境温度下稳定运行
- 光 → 信/网:光子芯片实现片上光互连,突破电互连带宽-功耗瓶颈
- 机 → 控/软:协作机器人通过谐波减速器+力矩传感器+实时操作系统实现精密装配
- 电 → 算/智:存算一体芯片(如忆阻器)将AI推理能效比提升3个数量级
- 信 → 网/控:5G URLLC(超可靠低时延通信)支持远程手术机器人亚毫秒级响应
- 控 → 软/智:模型预测控制(MPC)结合强化学习(RL)优化工业机器人轨迹规划
- 软 → 网/算:ROS 2通过DDS通信中间件实现跨平台机器人集群协同
- 网 → 智/算:数字孪生平台通过云端AI大模型实现设备故障预测
- 算 → 智/控:神经网络控制器(NNC)直接映射到FPGA硬件,实现毫秒级控制决策
- 智 → 全域:具身智能(Embodied AI)使机器人通过光机电软算协同实现自主进化
二、典型技术融合案例
案例1:自动驾驶系统(光-机-电-信-控-软-网-算-智)
| 技术域 | 贡献 |
|---|---|
| 光 | 激光雷达(LiDAR)提供3D环境感知,摄像头捕捉视觉信息 |
| 机 | 线控转向/制动系统实现执行机构高精度控制 |
| 电 | 车载电源管理系统支持12V/48V/800V多电压平台供电 |
| 信 | 多传感器数据融合算法(如卡尔曼滤波)提升感知鲁棒性 |
| 控 | 基于MPC的轨迹跟踪控制器,结合LQR抑制车身侧倾 |
| 软 | AUTOSAR架构实现功能安全(ASIL-D)与AUTOSAR Adaptive支持高性能计算 |
| 网 | V2X通信实现车-车/车-基础设施协同决策 |
| 算 | Transformer架构的BEVFormer模型实现4D空间感知 |
| 智 | 端到端自动驾驶大模型(如UniAD)直接输出控制指令 |
案例2:半导体光刻机(光-机-电-材-热-控-算-软)
| 技术域 | 贡献 |
|---|---|
| 光 | EUV极紫外光(13.5nm)实现7nm以下芯片制程 |
| 机 | 双工件台系统(定位精度<1nm)通过空气轴承实现纳米级运动 |
| 电 | 超快脉冲激光电源(飞秒级同步精度)驱动光源系统 |
| 材 | 低热膨胀系数(CTE)材料(如零度玻璃)保证光学系统稳定性 |
| 热 | 主动冷却系统(如液氦循环)将光刻腔温度波动控制在±0.01℃ |
| 控 | 激光干涉仪+压电陶瓷执行器实现光路实时校准 |
| 算 | 光刻仿真算法优化掩模版图形,OPC(光学邻近校正)补偿衍射效应 |
| 软 | EDA工具链(如Mentor Calibre)实现光刻工艺全流程自动化 |
三、技术挑战与突破方向
1. 多物理场耦合难题
- 挑战:超快激光加工中光-热-力-等离子体耦合效应导致加工精度下降
- 突破:
- 多尺度建模:将飞秒激光与材料相互作用分解为电子激发(fs级)、晶格加热(ps级)、相变(ns级)三个阶段
- 实时闭环控制:通过高速相机(帧率>10^6 fps)监测等离子体羽辉,动态调整激光参数
2. 异构系统集成瓶颈
- 挑战:光子芯片与电子芯片的工艺差异(如CMOS vs InP)导致混合集成良率低
- 突破:
- 三维异构集成:通过硅通孔(TSV)与微转印技术实现光电器件垂直堆叠
- 功能复用设计:将电驱动电路与光调制器集成于同一芯片(如铌酸锂薄膜器件)
3. 智能算法工程化障碍
- 挑战:深度学习模型在工业场景中存在泛化能力差、可解释性弱等问题
- 突破:
- 知识蒸馏:将大模型(如GPT-4)的决策逻辑迁移至轻量化边缘设备
- 神经符号系统:结合神经网络(NN)与符号推理(如专家系统)提升可靠性
四、未来技术融合趋势
1. 光子-电子-算力一体化
- 光子计算芯片:通过马赫-曾德尔干涉仪(MZI)阵列实现矩阵乘法加速,能效比达10^15 TOPS/W
- 应用场景:
- 实时视频分析:在安防摄像头端侧完成目标检测,时延<10ms
- 药物分子模拟:加速量子化学计算,缩短新药研发周期
2. 具身智能体自主进化
- 技术路径:
- 多模态感知融合:结合激光雷达点云、触觉传感器阵列、事件相机实现环境全息感知
- 双环控制架构:外环(AI规划)生成高层任务,内环(传统控制)实现底层稳定
- 典型应用:
- 工业机器人:通过数字孪生平台模拟10^6种工况,自主优化装配策略
- 人形机器人:基于大语言模型(LLM)实现自然语言任务理解与执行
3. 可持续制造技术体系
- 绿色光刻技术:
- 无掩模光刻:通过空间光调制器(SLM)直接生成光场,减少化学试剂消耗
- 干法刻蚀替代:采用原子层刻蚀(ALE)技术,降低等离子体损伤
- 循环经济模式:
- 材料基因组计划:通过高通量实验与AI预测,加速可降解电子材料研发
- 退役设备重生:将废旧光伏板中的银浆回收率提升至99%
五、工程师能力升级路径
1. 跨学科知识体系构建
- 必修课程:
- 光机电一体化:激光原理+机械设计+电路分析+嵌入式编程
- 智能系统工程:机器学习+控制理论+通信协议+数字孪生
- 实践方法:
- MBSE(基于模型的系统工程):使用SysML语言统一描述多领域需求
- 硬件在环(HIL)测试:通过dSPACE/NI VeriStand验证算法与硬件兼容性
2. 工具链整合能力
| 技术域 | 核心工具 |
|---|---|
| 光 | Zemax(光学设计)、COMSOL(光热耦合仿真) |
| 机 | SolidWorks(结构设计)、ANSYS Workbench(动力学分析) |
| 电 | Cadence Virtuoso(集成电路设计)、Altium Designer(PCB布局) |
| 信 | Wireshark(协议分析)、USRP(软件无线电) |
| 控 | MATLAB/Simulink(控制算法开发)、LabVIEW(实时测试) |
| 软 | Git(版本控制)、Docker(容器化部署) |
| 网 | OMNeT++(网络仿真)、OPC UA(工业通信) |
| 算 | PyTorch(深度学习)、Gurobi(数学优化) |
| 智 | ROS 2(机器人开发)、Stable Diffusion(生成式AI) |
3. 工程思维范式转型
- 从“功能实现”到“四维优化”:
- 性能:系统响应速度、定位精度等硬指标
- 成本:BOM成本、研发周期、维护费用
- 可靠性:MTBF(平均无故障时间)、失效模式分析
- 可持续性:能耗、碳足迹、可回收性
- 案例:设计工业相机时需平衡:
- 光学性能:分辨率 vs 镜头体积
- 电路设计:帧率 vs 功耗
- 算法效率:检测准确率 vs 计算资源占用
- 成本控制:CMOS传感器选型 vs 整机售价
六、总结:构建技术协同创新生态
现代复杂系统的核心竞争力源于“基础学科交叉-关键技术突破-工程方法落地”的三级火箭模式:
- 底层创新:通过材料基因组、光子芯片等颠覆性技术打破现有技术范式
- 中层融合:利用MBSE、数字孪生等方法实现多技术域协同设计
- 顶层应用:在自动驾驶、智能工厂、太空探索等场景中验证技术价值
工程师需具备“T型能力结构”:
- 纵向深耕:在某一技术域(如算法)达到专家级水平
- 横向贯通:理解其他技术域的基本原理与交互接口
未来十年,光-机-电-材-热-信-控-软-网-算-智的深度融合将催生万亿级新市场,而掌握这一技术体系的工程师将成为推动第四次工业革命的核心力量。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











