







一、向量
1.向量通常表示为向量a或bold a;使用末位置的点坐标-初位置的点坐标;有方向和长度;没有绝对的开始位置。
2.向量正则化(Vector Normalization):
向量的长度![]()
单位向量:长度为1的向量,被用来表示方向。
计算公示:
3.向量加法
几何上使用平行四边形法则和三角形法则。
代数上使用简单坐标相加。
4.笛卡儿积
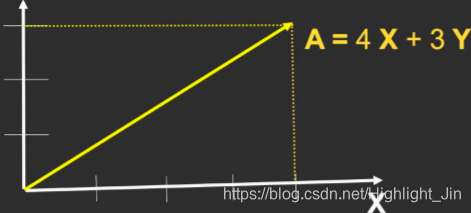
X和Y可以是任何向量,通常是正交的单位向量。
,
,
5.向量乘法
(1)点积,结果是一个数。
对于单位向量:
点乘可以快速得到两个向量之间的夹角。
- 性质:满足交换律和分配率。
- 笛卡尔坐标系中点积:对应坐标相乘再相加。
- 点积在图形学中的应用:
两个向量之间的夹角
一个向量投影到另一个向量上
可以任意将一个向量分解到垂直方向、水平方向。
计算两个向量或两个方向的接近程度。
前与后的信息。
(2)叉积,结果是一个向量。
使用右手螺旋定则:四指代表旋转的方向,拇指代表叉乘后结果的方向。
在三维的空间中,如果,则说是右手坐标系。(本课程中用的是右手坐标系)
叉积在图形学中的应用:
判定左/右
判定内/外
(3)标准正交基和坐标系(Orthonormal bases and coordinate frames)
二、矩阵
矩阵就是一系列的数字,排列成几行几列的形式。
- 矩阵&标量值相乘/相加:每个元素相乘/相加。
- 矩阵&矩阵相乘:(M×N)(N×P)(M×N)(N×P),要求前一个的列数 = 后一个矩阵的行数。
1.矩阵-矩阵相乘
前一个矩阵的列数=后一个矩阵的行数
性质:不满足交换律;满足结合律和分配律。
2.矩阵-向量相乘
一个向量可以看成m x 1的矩阵。
关于y轴对称:
3.矩阵转置
4.单位矩阵和逆矩阵
单位矩阵:
矩阵的逆:
5.用矩阵的形式表示向量相乘
点乘:
叉乘:

















 3850
3850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









