






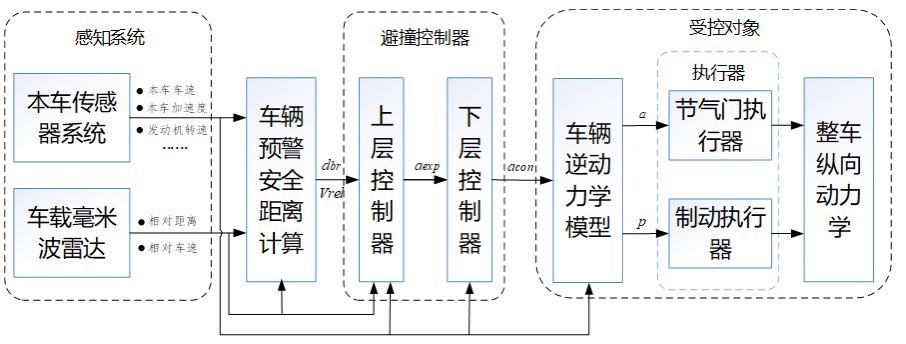
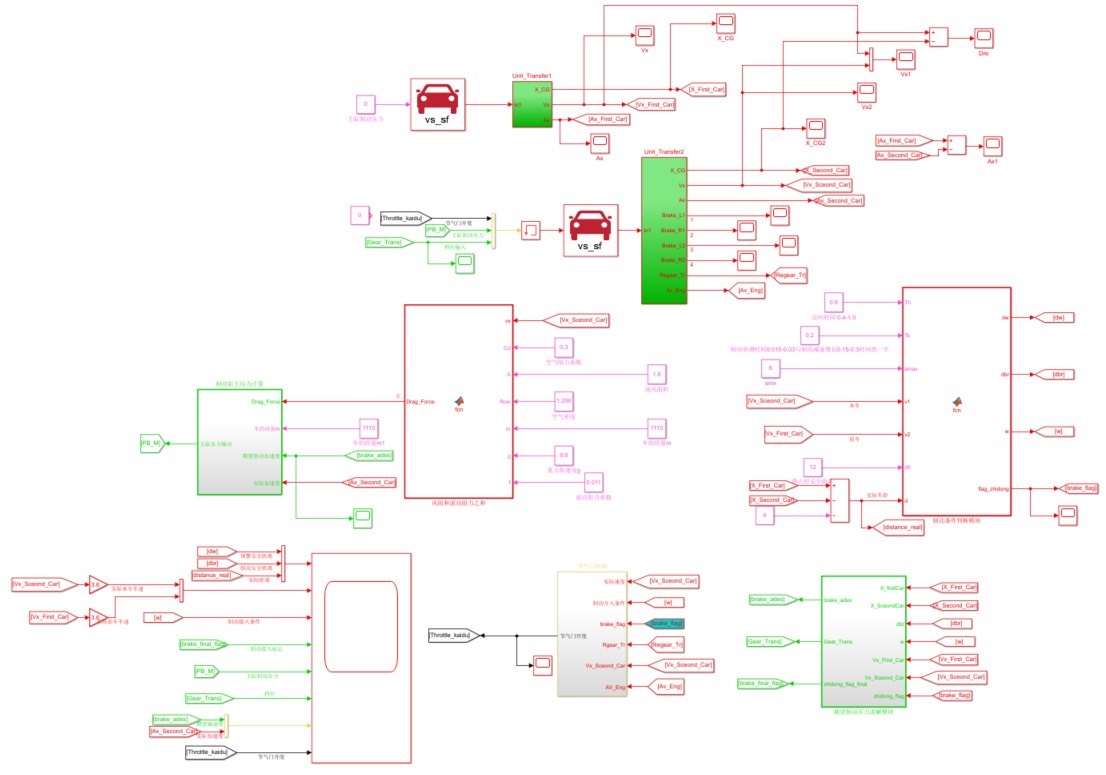
车辆紧急防避撞AEB控制该模型包括,基于Carsim及Matlab/simulink的联合仿真控制模型
(1)驾驶员制动模型来模拟制动过程;
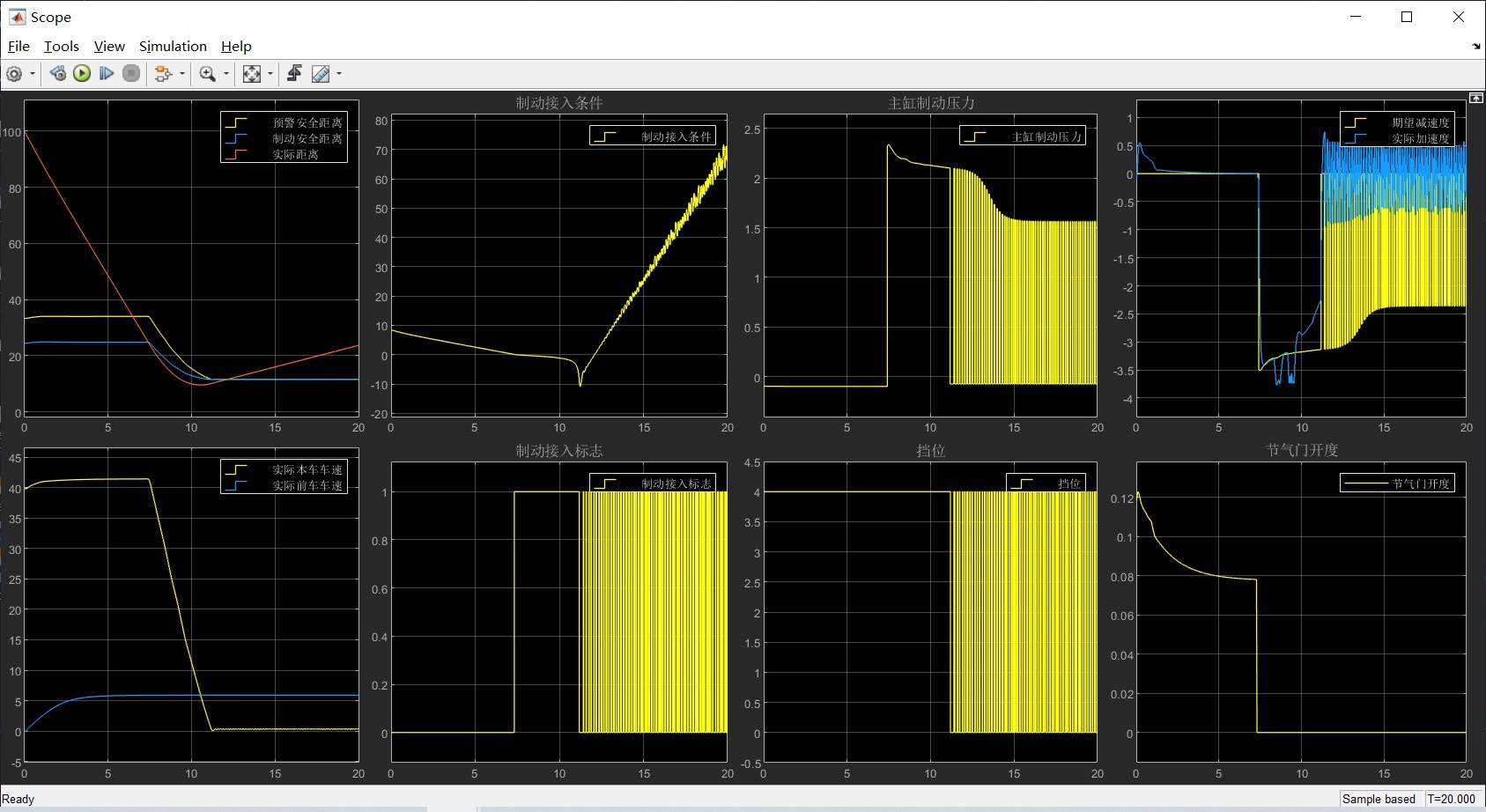
(2)实现以模糊控制实现期望减速度的计算,
(3)纵向发动机逆动力学模型实时求解期望节气门开度,
(4)驱动与制动的切换控制,以及制动压力与减速度之间的关系计算,
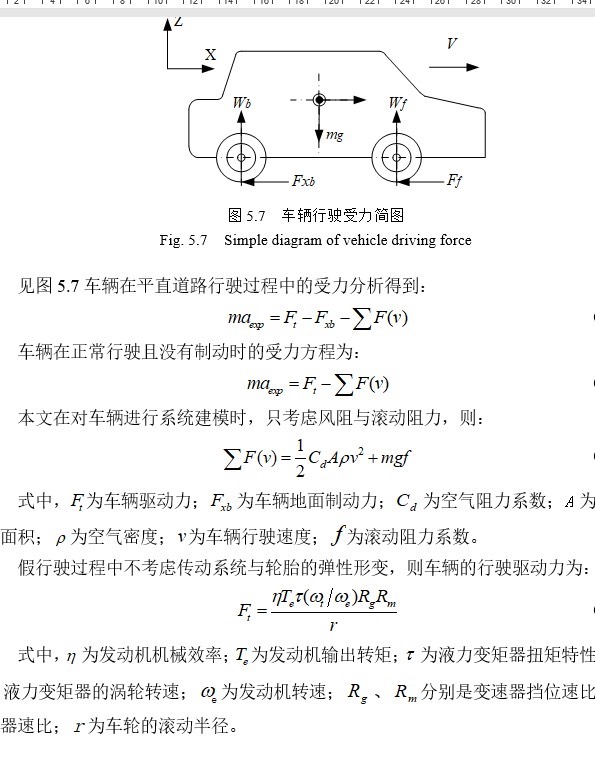
(5)车辆动力学模型实现实际的风阻和滚动阻力的计算以及节气门开度计算等,
【资料】提供详细的建模过程,模型公式的耦合关系文档,帮你清晰的了解模型原理。
YID:41199777560395982
Fjdunnzora
车辆紧急防避撞(AEB)技术是现代车辆安全系统的重要组成部分,能够在遇到紧急情况下帮助驾驶员进行制动,以避免碰撞或减轻碰撞的严重程度。在这篇文章中,我们将介绍一种基于Carsim和Matlab simulink的联合仿真控制模型,该模型能够有效模拟车辆紧急防避撞控制过程。本文将详细介绍该模型的各个组成部分及其相互耦合的原理和建模过程。
首先,驾驶员制动模型是模型的基础,它通过模拟制动过程来反映驾驶员的制动行为。通过对驾驶员制动过程的仿真,我们能够更好地理解驾驶员的制动反应,并在该模型中进行相应的计算。
其次,为了实现期望减速度的计算,我们采用了模糊控制的方法。模糊控制能够根据输入的模糊规则来计算期望减速度,从而帮助车辆控制系统更好地把握制动时机和力度。
在纵向发动机逆动力学模型中,我们将实时求解期望节气门开度,以达到更精确的控制效果。通过对发动机反应的建模和仿真,我们能够更好地了解车辆动力系统的特性,从而优化控制策略。
此外,驱动与制动的切换控制是该模型中的关键环节之一。通过准确控制驱动和制动系统之间的切换时间和力度,我们能够更好地平衡车辆的动力和制动效果,从而提高紧急防避撞控制的效果。
最后,车辆动力学模型是模型的核心部分,它包括风阻和滚动阻力等实际因素的计算,并结合节气门开度来模拟车辆的运动过程。通过对车辆动力学的建模和仿真,我们能够更准确地预测车辆的运动轨迹和制动效果,从而帮助车辆控制系统做出更合理的决策。
通过本文提供的详细建模过程和模型公式的耦合关系文档,读者可以清晰地了解这一联合仿真控制模型的原理和实现方法。该模型的应用将有助于提升车辆的紧急防避撞能力,保障驾驶员和乘客的安全。未来的研究可以进一步优化该模型,提高其实时性和适应性,以适用于更多不同类型的车辆和驾驶环境。
总之,本文通过详细介绍基于Carsim和Matlab simulink的联合仿真控制模型,全面分析了车辆紧急防避撞(AEB)技术的原理和实现方法。该模型的应用具有重要的实际意义,并对未来的研究提供了有益的参考。希望本文对读者能够提供有价值的技术分析,并为相关领域的研究工作提供借鉴和启示。
相关的代码,程序地址如下:http://nodep.cn/777560395982.html
















 396
396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









