







一、查看物理连接
连接12/24VDC电源
雷达与电脑使用网线连接
二、修改电脑IP
打开网络连接中的“以太网”
点击属性
打开Internet协议版本4
修改电脑IP
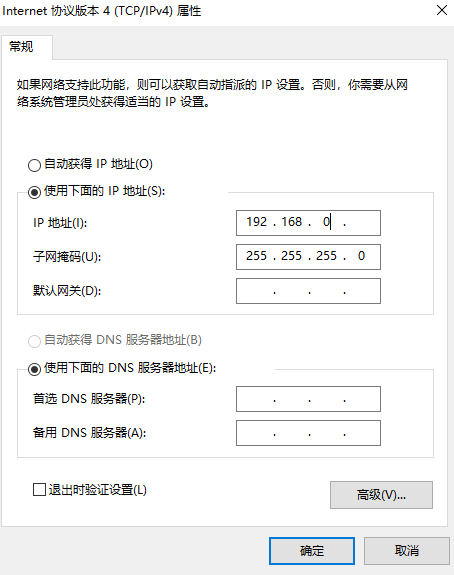
(电脑与雷达IP的网端需要一样,最后一位需要不一致在1-255之间选择)
三、电脑连接雷达
使用UrgBenriPlus软件查看IP

①打开软件→Tools→IP Address Search
连接12/24VDC电源
雷达与电脑使用网线连接
打开网络连接中的“以太网”
点击属性
打开Internet协议版本4
修改电脑IP
(电脑与雷达IP的网端需要一样,最后一位需要不一致在1-255之间选择)
使用UrgBenriPlus软件查看IP
①打开软件→Tools→IP Address Search
 1197
413
1197
413











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















