






Windows测试PAVO
windows下查状态:
C:\Windows\system32>arp -a
接口: 10.10.10.100 --- 0x26
Internet 地址 物理地址 类型
10.10.10.101 78-13-05-d1-0e-de 动态
10.10.10.255 ff-ff-ff-ff-ff-ff 静态
224.0.0.22 01-00-5e-00-00-16 静态
224.0.0.251 01-00-5e-00-00-fb 静态
224.0.0.252 01-00-5e-00-00-fc 静态
239.255.255.250 01-00-5e-7f-ff-fa 静态
255.255.255.255 ff-ff-ff-ff-ff-ff 静态
资源获取
官方网站:http://www.siminics.com/Surport/List
软件包下载:

PavoView软件下载

解压后的路径似乎不能在中文路径下
运行.exe文件,安装中不用将路径加入PATH即可运行。
用激光雷达连接电脑网卡口,看到网络适配器中多出一个【以太网2】
测试及使用
1. 进入控制面板-网络连接
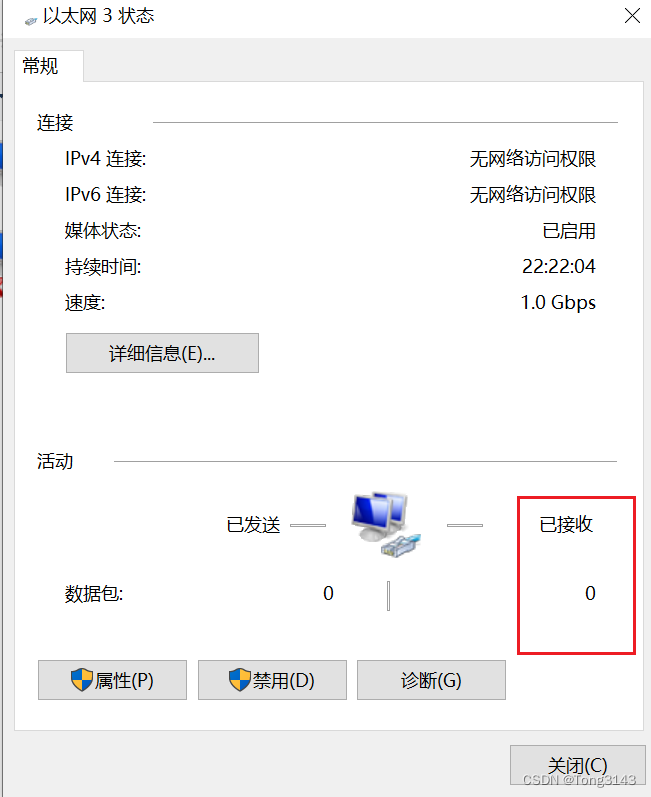
查看有无新设备“以太网3”,下行为“xxx GB"
若显示网络未识别没关系
双击该设备,底部接受显示有数据跳动,表示正常接受数据

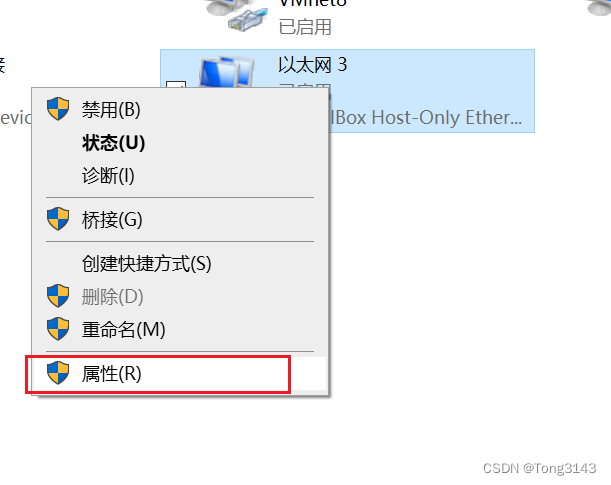
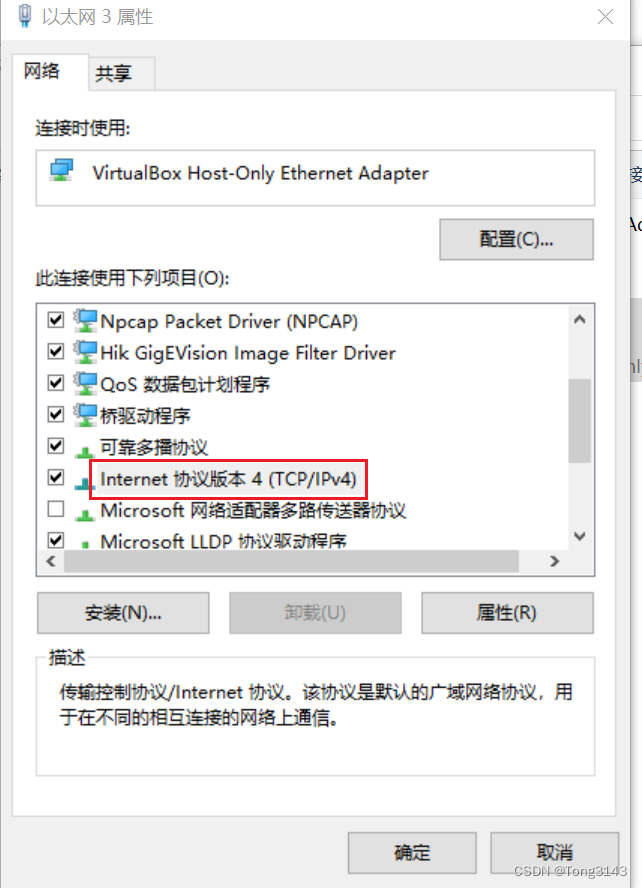
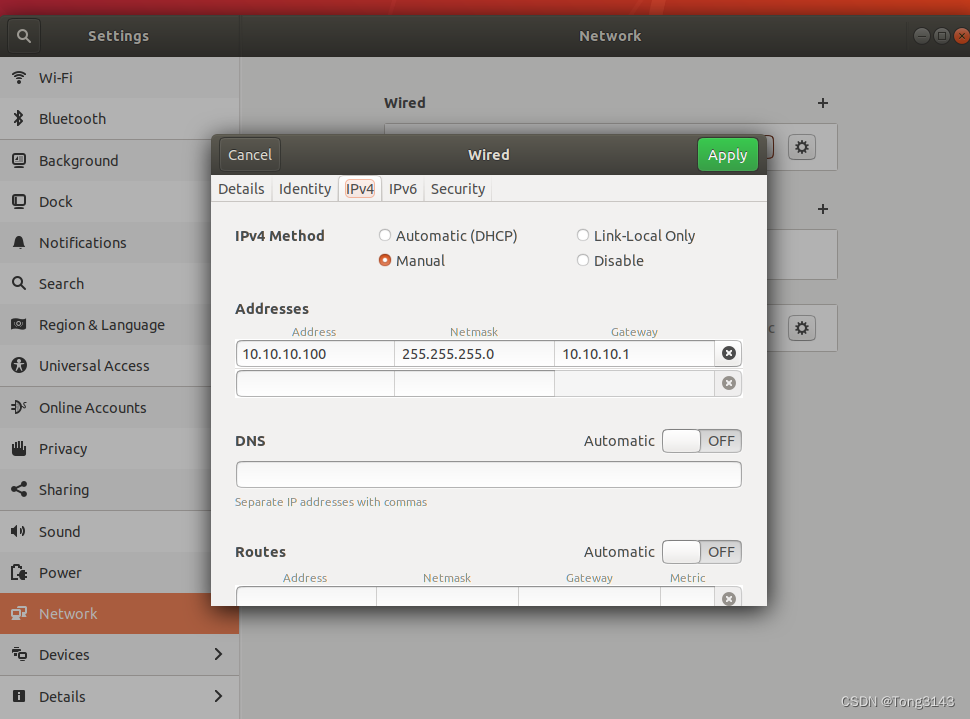
右键该设备,选择属性,双击【Internet协议版本4】,设置雷达IP,具体可见SIMINICS星秒激光雷达PAVO-用户售后支持手册V1.4.0.pdf p13
设IP如下:
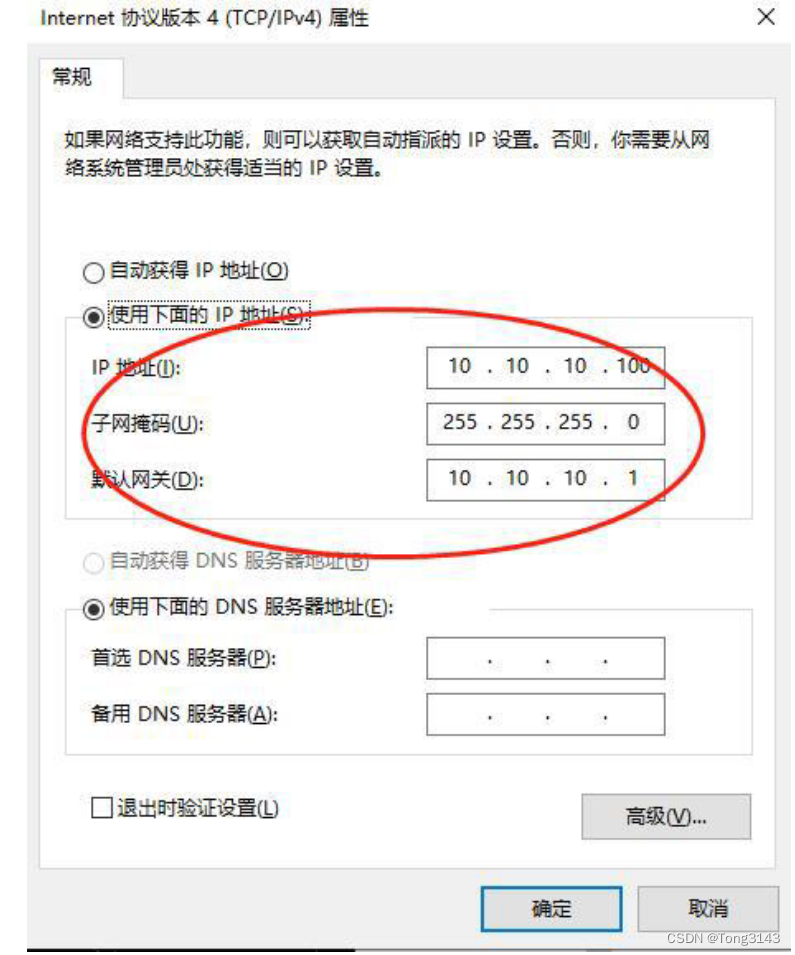
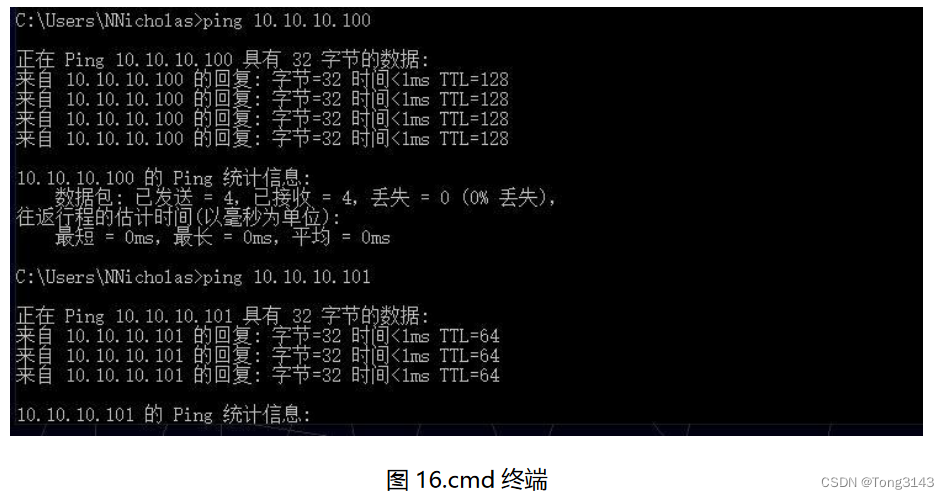
设完之后cmd ping一下:
2. 确认设备管理器-网络适配器中有该设备
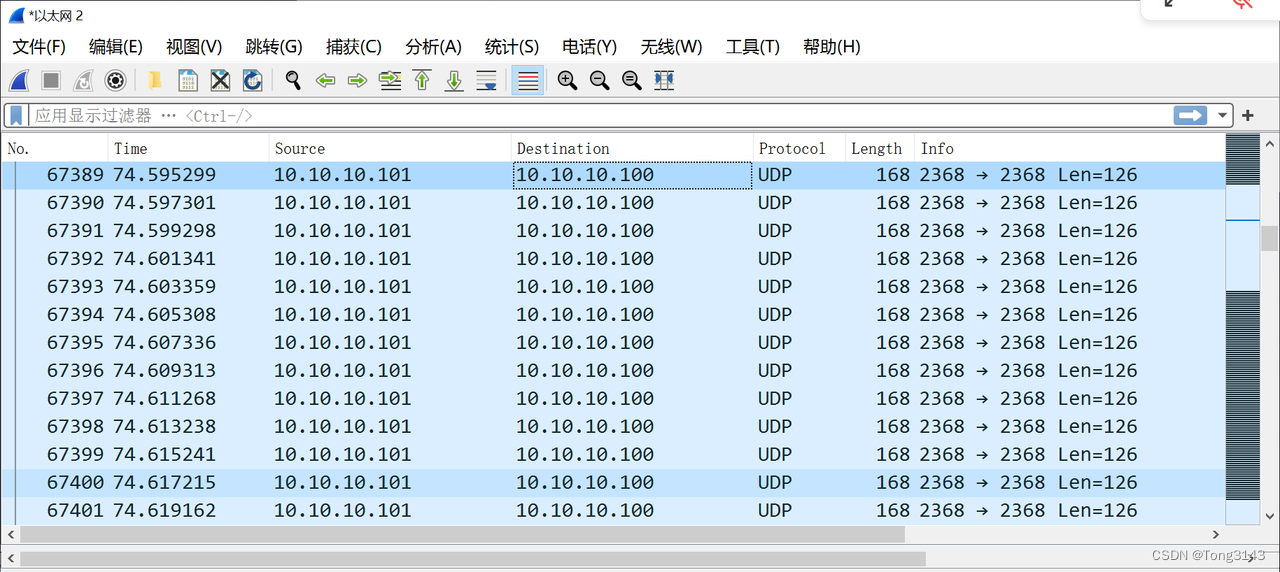
3. wireshark中显示无误
4. 确认以上无误后
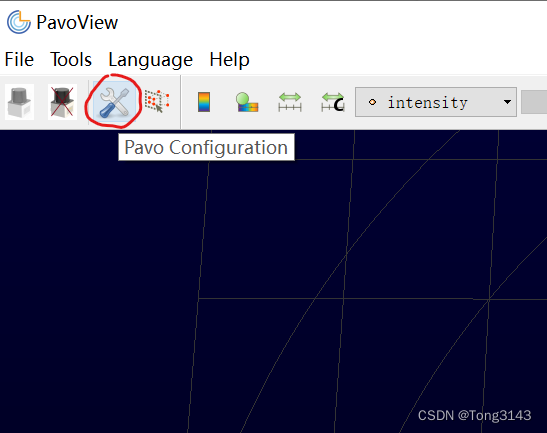
1)在软件界面选择file-open-sensor stream
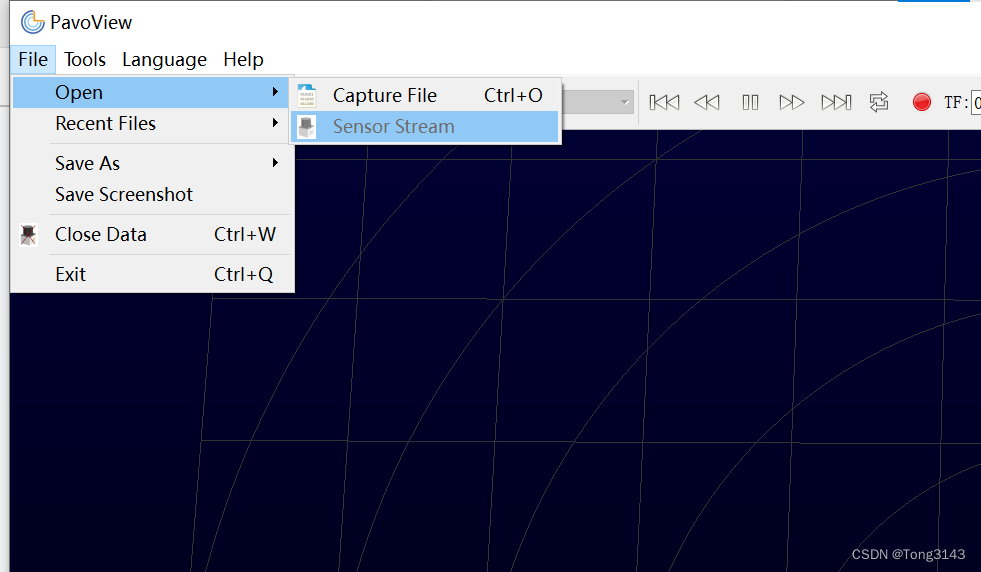
显示连接以太网2
然后提示确认IP,点击OK
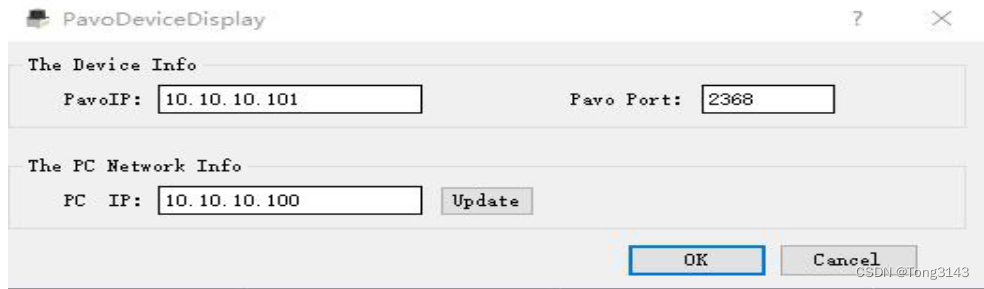
等待后显示如下:

点击该项后会出现settings设置
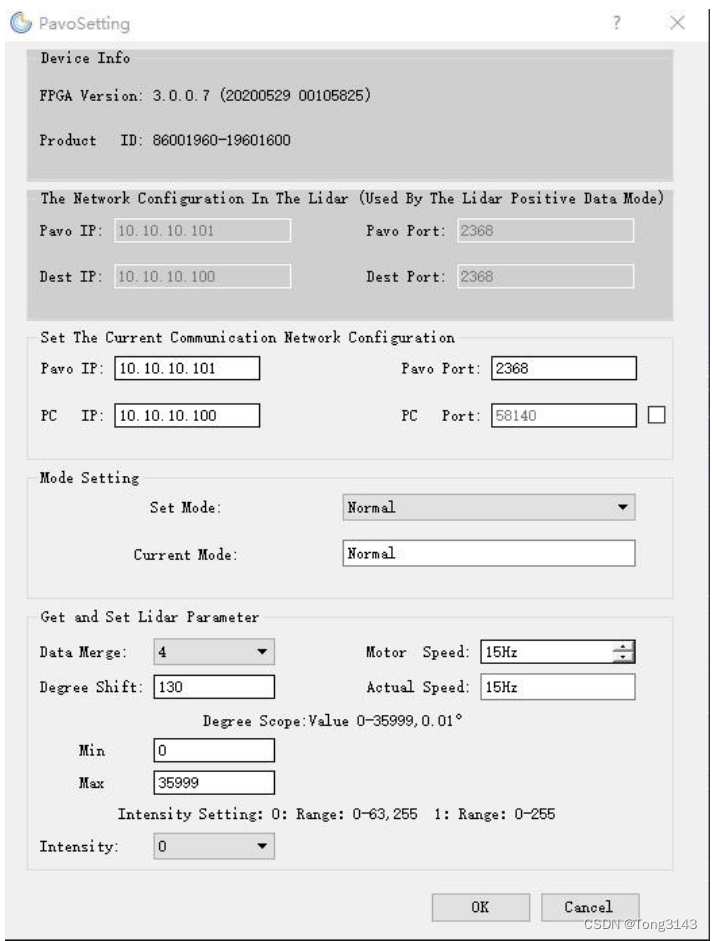
具体参考
PavoView使用指南-V1.2.1.15.pdf
SIMINICS星秒激光雷达PAVO-用户售后支持手册V1.4.0.pdf
官方公众号:公众号文章
类似激光雷达的博客:
速腾(RoboSense)16线激光雷达调试出点云图(Ubuntu1804和windows系统都已经显示点云),包含各种遇见的坑【避坑指南】{[driver][socket]Rslidar poll}
虚拟机配置pavo
设置为桥接,将“已连接至”设为网卡口

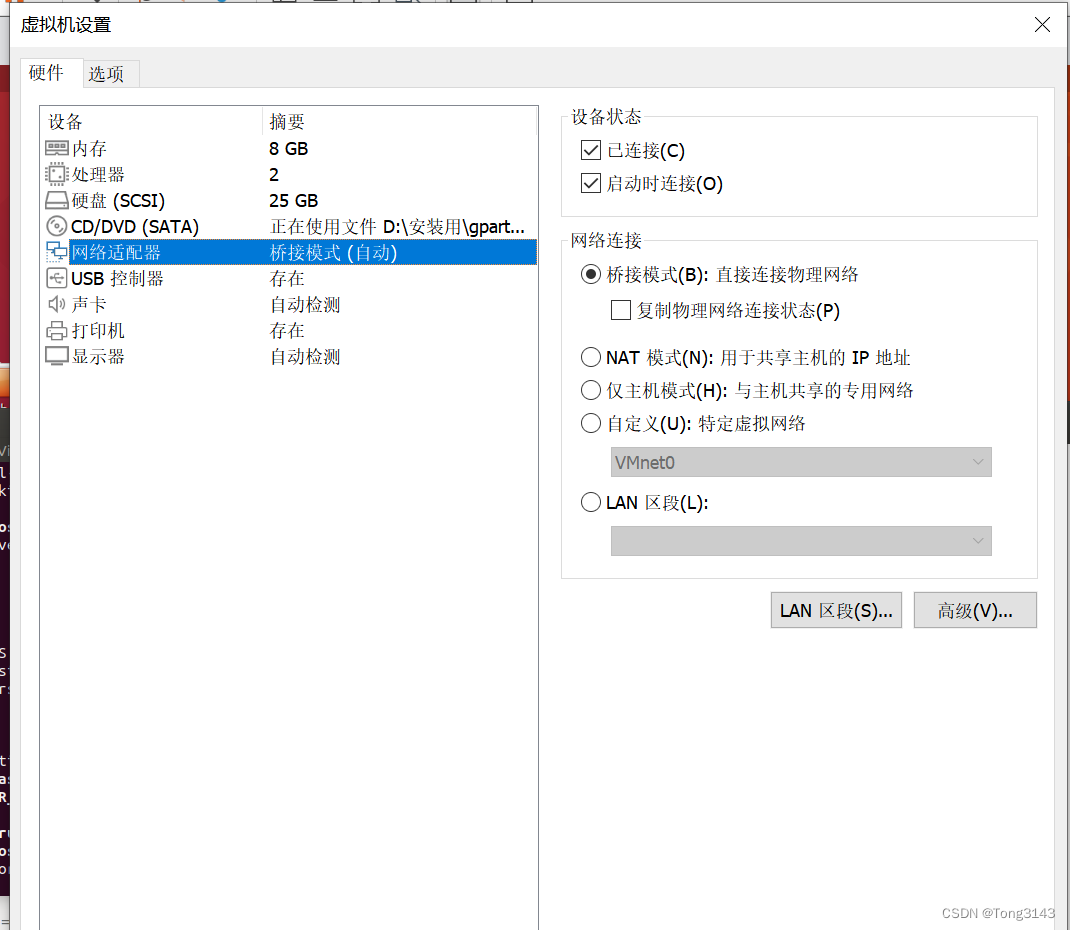
false get speed说明没连接到,修改wired的IP
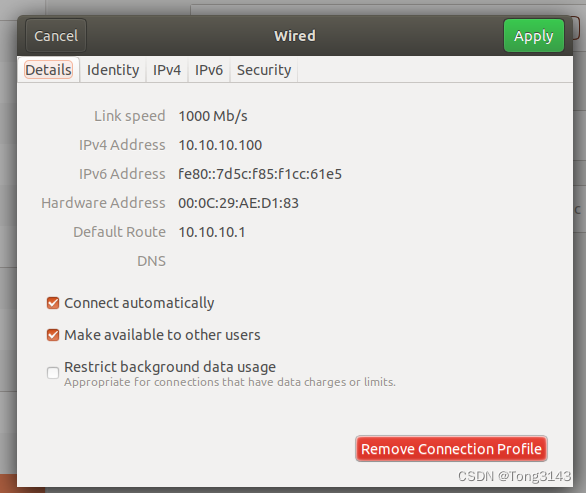
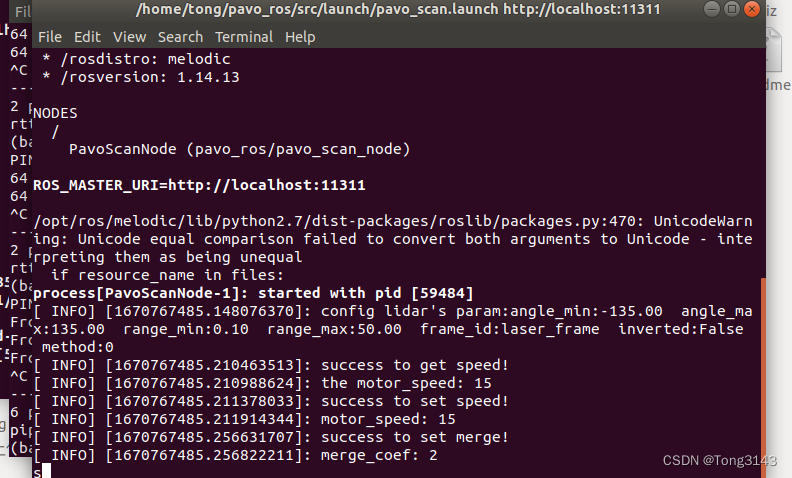
成功连接到:
ping10.10.10.100和101都通,10.10.10.1不通没关系
运行pavo_scan_view
1)发布LaserScan消息
1.roslaunch pavo_ros pavo_scan.launch
2.roslaunch pavo_ros pavo_scan_view.launch (使用rviz显示
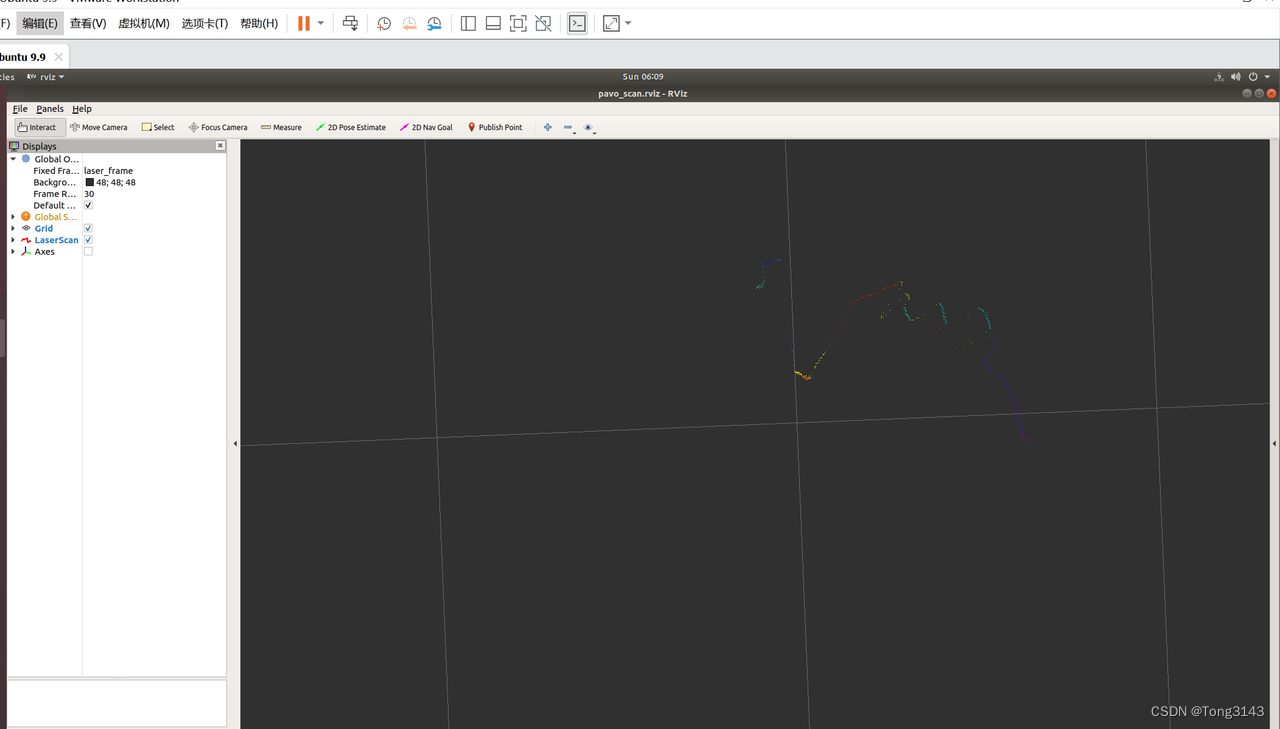
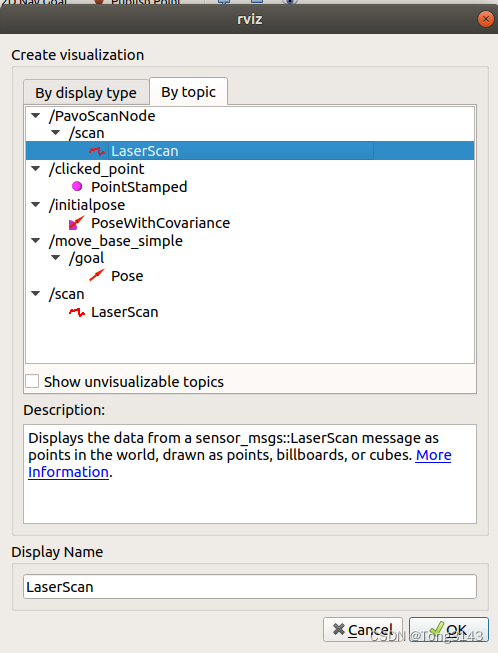
如果rviz没有发出消息,尝试点左下角add添加topic
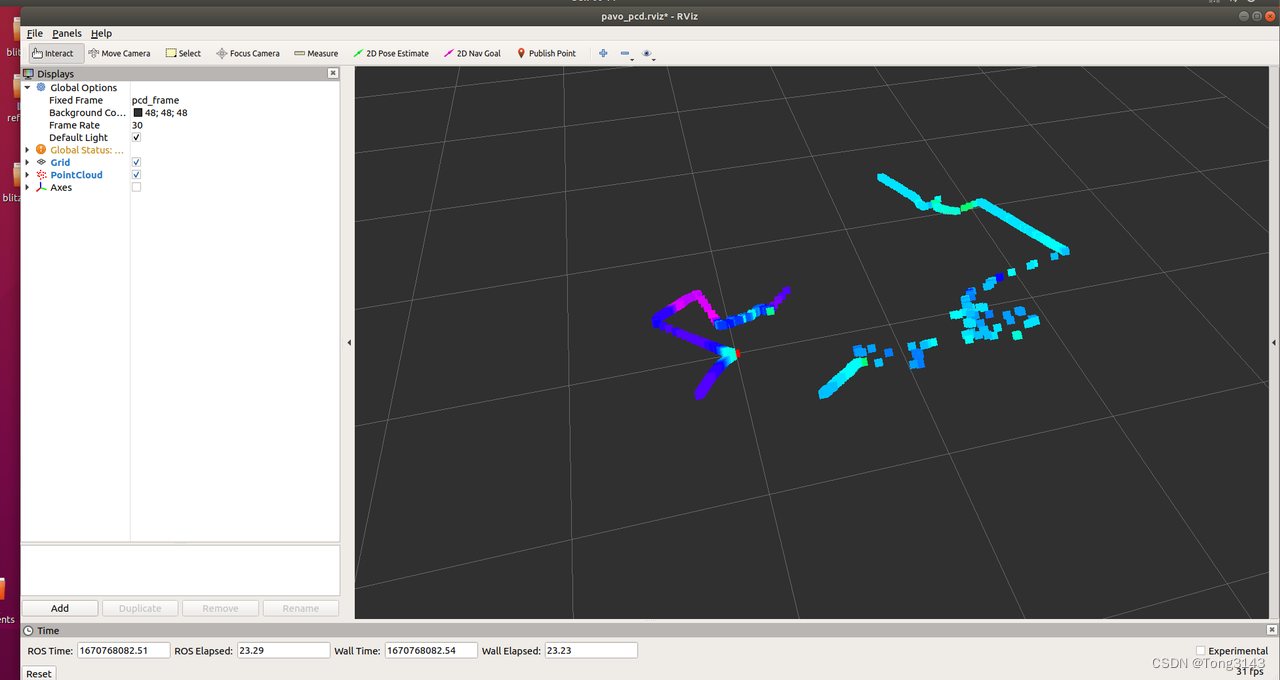
2)发布PointCloud消息
1.roslaunch pavo_ros pavo_pcd.launch
2.roslaunch pavo_ros pavo_pcd_view.launch (使用rviz显示)
常见问题及踩坑
- 问题1:Windows上收不到激光数据
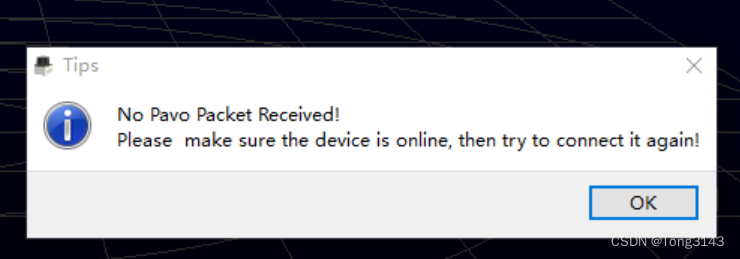
参考的解决方式:参考
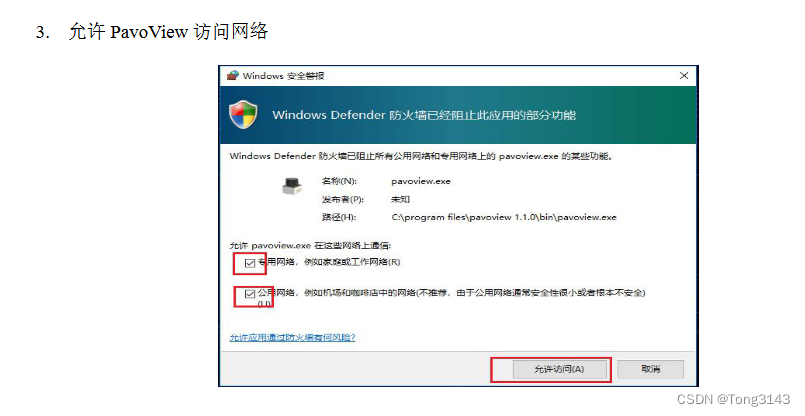
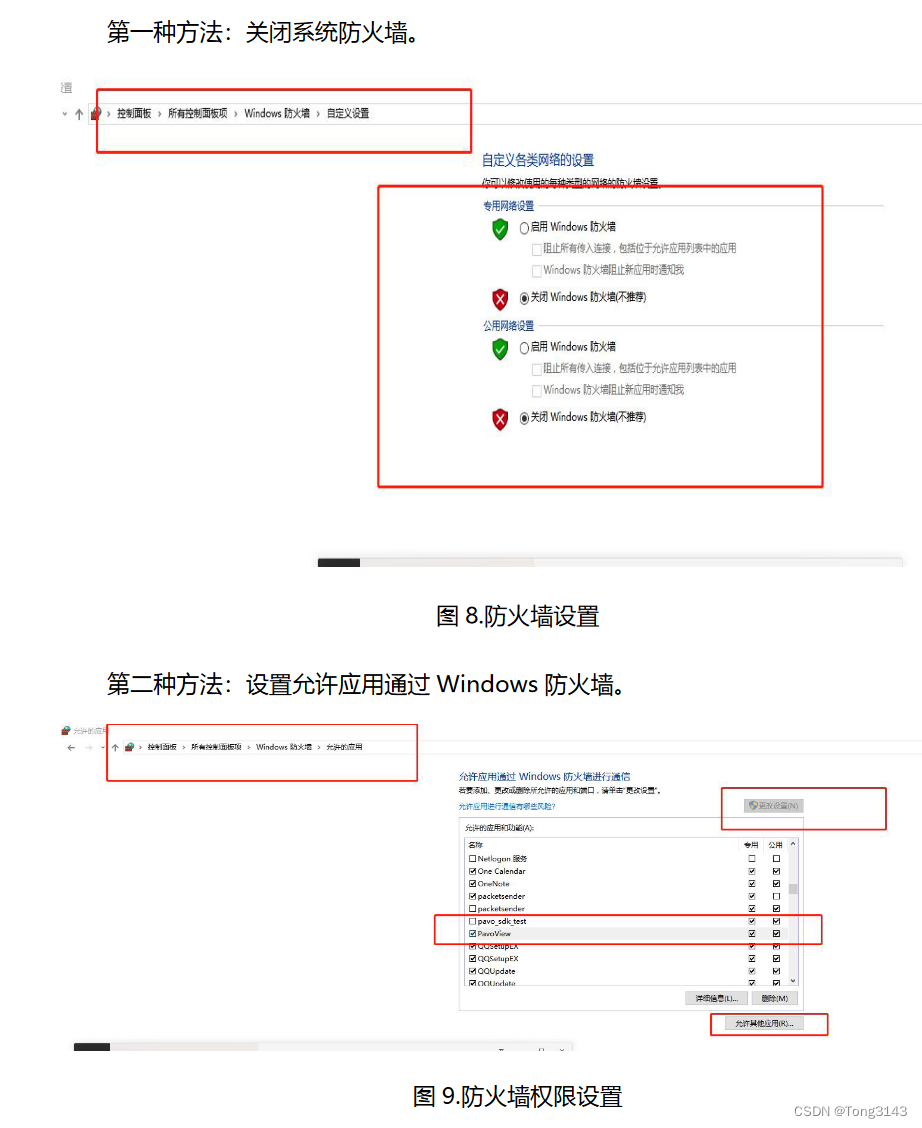
- 尝试关闭防火墙
- 尝试更新网卡驱动
报错的时候中间尝试更新了一下网卡驱动,不知道有没有关系
参考:https://jingyan.baidu.com/article/02027811438cb55acc9ce5eb.html
-
问题2:正常windows上ping双方无问题,虚拟机上ping不通
查看wireshark里有没有接受到数据
重设虚拟机IP为10.10.10.100,重启虚拟机 -
问题3:catkin_make编译报错
/home/lazy/test_laser_ws/src/pavo_ros2.0.9/src/pavo_scan_node.cpp:5:41: fatal error: pavo_ros/pavo_ros_cfgConfig.h
有包没装,看看CmakeList或者ros有什么前提安装包先sudo apt install 上

















 842
842

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









