





车架选择为:小车 Aion Robotics R1 UGV
问题主要出在遥控器映射上
如图,此时油门推到底,对照可知油门为三通道
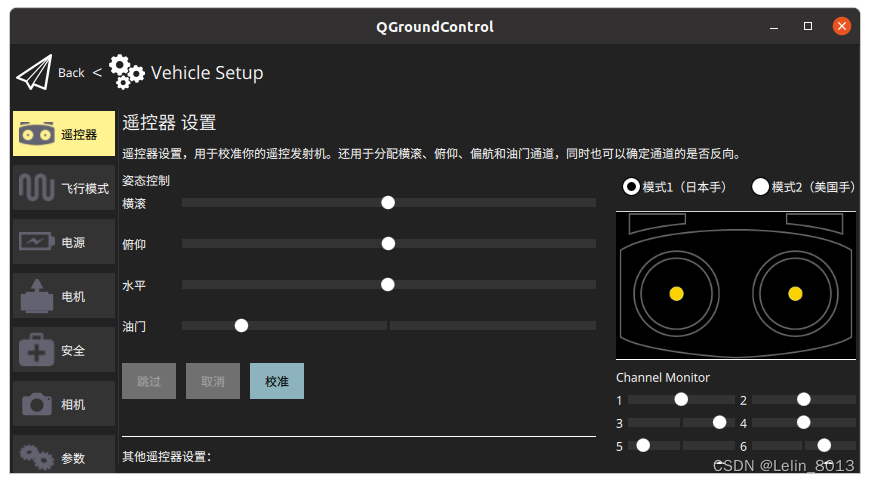
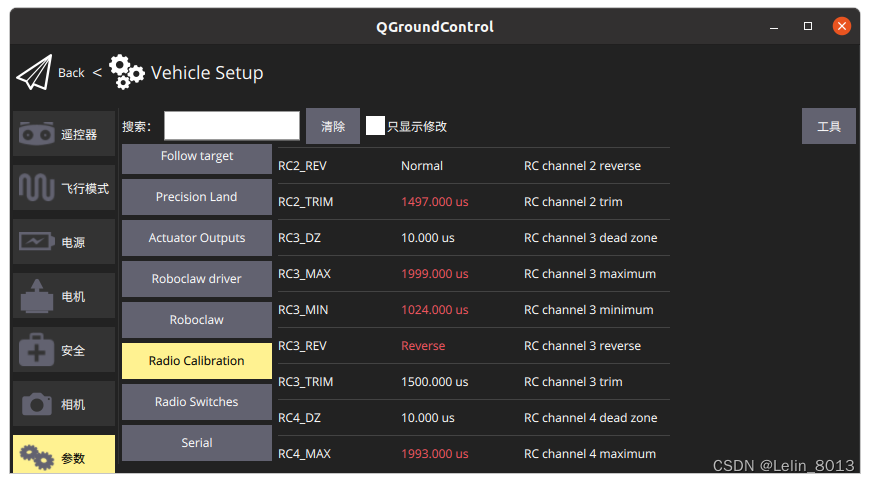
我们在测试时发现油门到底时小车停止,说明油门底部被映射成了停止位,去参数->Radio Callbration中去寻找RC3_TRIM发现此时数值为1999,我们PWM输出默认是1000到2000,1500时应该为停止,所以把RC3_TRIM设置成1500,问题解决。

车架选择为:小车 Aion Robotics R1 UGV
问题主要出在遥控器映射上
如图,此时油门推到底,对照可知油门为三通道
我们在测试时发现油门到底时小车停止,说明油门底部被映射成了停止位,去参数->Radio Callbration中去寻找RC3_TRIM发现此时数值为1999,我们PWM输出默认是1000到2000,1500时应该为停止,所以把RC3_TRIM设置成1500,问题解决。
 4492
4492











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























