










摘自:https://www.guyuehome.com/8983
基于px4的无人机自主导航
1187
1
2020年6月30日 12时12分
基于px4的无人机自主导航
在ros的学习过程中我们经常可以看到自主导航的小车,那么无人机是否也能像小车一样建图导航呢?本文即主要介绍如何在px4平台基础上进行无人机自主导航仿真实验。
ROS导航框架介绍
无人机导航运动控制系统大致分为五个层次的架构,从高到低依次为:给定目标位置->建图定位->路径规划->底层控制->无人机转子速度。总结起来如下图所示:

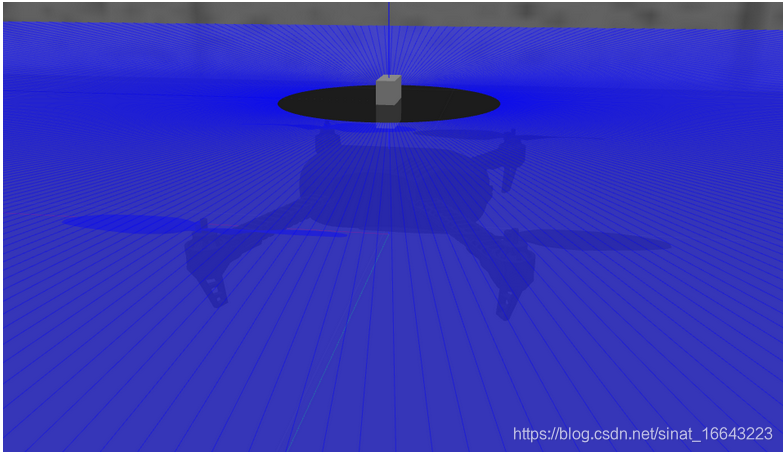
将小车导航中用到的激光雷达移植到无人机上,通过激光雷达的扫描信息进行建图导航,无人机大致的模型如下图所示,其中蓝色的光束即代表无人机激光雷达扫描发射的光束。
ROS及PX4环境搭建
本文实现的无人机自主导航是基于px4无人机仿真环境以及ROS-melodic下完成的
_ROS及部分工具安装_
1 . 加入ros的安装源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2 . 加入秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3 . 更新
sudo apt-get update
4 . 安装ros
sudo apt-get install ros-melodic-desktop
5 . Source ROS
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc
6 . 安装Gazebo
sudo apt install ros-melodic-gazebo9*
7 . 初始化rosdep
rosdep initrosdep update
8 . 安装catkin工具
sudo apt-get install ros-melodic-catkin python-catkin-tools
9 . 安装mavros
sudo apt install ros-melodic-mavros ros-melodic-mavros-extras
10 . 安装geographiclib dataset
#下载脚本wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh#为脚本添加权限chmod +x install_geographiclib_datasets.sh#执行脚本sudo ./install_geographiclib_datasets.sh
px4仿真工具安装说明
1 . 利用脚本安装必要的工具链
#下载脚本wget https://raw.githubusercontent.com/PX4/Firmware/master/Tools/setup/ubuntu.shwget https://raw.githubusercontent.com/PX4/Firmware/master/Tools/setup/requirements.txt#这俩个文件下载不下来可以试试“xx上网”#执行脚本:source ubuntu.sh
- 创建工作空间
mkdir -p ~/catkin_ws/srccd ~/catkin_ws/src/catkin_init_workspace
- 下载编译px4
#下载代码cd ~/catkin_ws/git clone https://github.com/PX4/Firmware#然后更新submodule切换固件并编译cd Firmwaregit submodule update --init --recursivegit checkout v1.11.0-beta1make distclean#在具体编译前还需要安装相关的工具sudo apt-get install python-jinja2sudo pip install numpy toml#开始编译make px4_sitl_default gazebo
- 添加相应的环境变量信息
cd ~/catkin_ws/catkin build#添加工作空间sourceecho "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc#添加gazebo模型路径echo "export GAZEBO_MODEL_PATH=:~/catkin_ws/models" >> ~/.bashrc#添加px4路径echo "source ~/catkin_ws/Firmware/Tools/setup_gazebo.bash ~/catkin_ws/Firmware ~/catkin_ws/Firmware/build/px4_sitl_default" >> ~/.bashrcecho "export ROS_PACKAGE_PATH=\$ROS_PACKAGE_PATH:~/catkin_ws/Firmware" >> ~/.bashrcecho "export ROS_PACKAGE_PATH=\$ROS_PACKAGE_PATH:~/catkin_ws/Firmware/Tools/sitl_gazebo" >> ~/.bashrcsource ~/.bashrc
无人机导航及定位功能包配置
1 . 安装必要的导航包
sudo apt-get install ros-melodic-navigationsudo apt-get install ros-melodic-gmappingsudo apt-get install ros-melodic-ar-track-alvar*sudo apt-get install ros-melodic-moveit*
2 . 自主导航实现
编写launch文件如下
_ros_2Dnav_demo_px4.launch_<launch><arg name="world_path" default="$(find simulation)/worlds/cloister.world" /><!-- 启动带有激光雷达的无人机模型--><include file="$(find simulation)/launch/px4/2Dlidar_px4.launch"><arg name="world" value="$(arg world_path)" /></include><!—参数说明--><param name="/mavros/local_position/tf/send" type="bool" value="true" /><param name="/mavros/local_position/frame_id" type="str" value="base_link" /><param name="/mavros/local_position/tf/frame_id" type="str" value="odom" /><!-- 启动建图--><include file="$(find ros_slam)/launch/gmapping.launch"></include><!-- 启动导航--><include file="$(find ros_navigation)/launch/nav_px4.launch"></include><!-- 启用导航输出转mavros节点--><include file="$(find px4_control)/launch/ros_2DNav.launch"><arg name="desire_posz_" value="2" /></include><!—启用键盘控制--><node pkg="simulation" type="keyboard_control_px4.py" name="keyboard_control_px4" output="screen" launch-prefix="gnome-terminal --tab -e"></node></launch>
该launch的主要作用是启用多个launch文件,其中包括启动gazebo以及无人机模型、建图、路径规划、键盘控制、将路径规划输出转换成无人机飞控的节点,其中,我们比较无人机的自主导航与小车的自主导航可以知道,主要差别就在于将路径规划的输出转换成无人机飞控的输出。
2Dlidar_px4.launch<launch><node pkg="tf" name="tf_2Dlidar" type="static_transform_publisher" args="0 0 0 3.1415926 0 0 base_link 2Dlidar_link 100"/><!-- vehicle pose --><arg name="x" default="0"/><arg name="y" default="0"/><arg name="z" default="0"/><arg name="R" default="0"/><arg name="P" default="0"/><arg name="Y" default="0"/><arg name="world" default="$(find simulation)/worlds/empty.world" /><arg name="sdf" default="$(find simulation)/models/iris_2Dlidar/iris_2Dlidar.sdf" /><arg name="verbose" default="false"/><arg name="debug" default="false"/><include file="$(find px4)/launch/mavros_posix_sitl.launch" ><arg name="x" value="$(arg x)"/><arg name="y" value="$(arg y)"/><arg name="z" value="$(arg z)"/><arg name="R" value="$(arg R)"/><arg name="P" value="$(arg P)"/><arg name="Y" value="$(arg Y)"/><arg name="sdf" value="$(arg sdf)" /><arg name="verbose" value="$(arg verbose)" /><arg name="debug" value="$(arg debug)" /><arg name="world" value="$(arg world)" /></include></launch>
该launch文件主要是启用了px4自带的无人机仿真启动文件,负责启动gazebo和无人机模型,其中我们将无人机模型换成加装了激光雷达的模型。
gmapping.launch<launch><arg name="scan_topic" default="/lidar2Dscan" /><arg name="base_frame" default="base_link"/><arg name="odom_frame" default="odom"/><node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"><param name="base_frame" value="$(arg base_frame)"/> <!--底盘坐标系--><param name="odom_frame" value="$(arg odom_frame)"/> <!--里程计坐标系--><param name="map_update_interval" value="1.0"/> <!--更新时间(s),每多久更新一次地图,不是频率--><param name="maxUrange" value="7"/> <!--激光雷达最大可用距离,在此之外的数据截断不用--><param name="maxRange" value="10"/> <!--激光雷达最大距离--><param name="/use_sim_time" value="true" /><param name="sigma" value="0.05"/><param name="kernelSize" value="1"/><param name="lstep" value="0.05"/><param name="astep" value="0.05"/><param name="iterations" value="5"/><param name="lsigma" value="0.075"/><param name="ogain" value="3.0"/><param name="lskip" value="0"/><param name="minimumScore" value="200"/><param name="srr" value="0.01"/><param name="srt" value="0.02"/><param name="str" value="0.01"/><param name="stt" value="0.02"/><param name="linearUpdate" value="0.5"/><param name="angularUpdate" value="0.436"/><param name="temporalUpdate" value="-1.0"/><param name="resampleThreshold" value="0.5"/><param name="particles" value="80"/><param name="xmin" value="-25.0"/><param name="ymin" value="-25.0"/><param name="xmax" value="25.0"/><param name="ymax" value="25.0"/><param name="delta" value="0.05"/><param name="llsamplerange" value="0.01"/><param name="llsamplestep" value="0.01"/><param name="lasamplerange" value="0.005"/><param name="lasamplestep" value="0.005"/><remap from="scan" to="$(arg scan_topic)"/></node></launch>
该launch文件主要是启用建图程序,主要是用了gmapping的建图功能包,所以在运行前我们需要安装好gmapping导航包,确保程序可以正常运行。
_nav_px4.launch_<launch><arg name="open_rviz" default="true"/><arg name="move_forward_only" default="false"/><arg name="cmd_vel_topic" default="/px4_vel" /><arg name="odom_topic" default="mavros/local_position/odom" /> <!-- frame_id: "odom" child_frame_id: "base_link" --><!-- move_base --><node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"><param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" /><rosparam file="$(find ros_navigation)/param/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find ros_navigation)/param/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find ros_navigation)/param/local_costmap_params.yaml" command="load" /><rosparam file="$(find ros_navigation)/param/global_costmap_params.yaml" command="load" /><rosparam file="$(find ros_navigation)/param/move_base_params.yaml" command="load" /><rosparam file="$(find ros_navigation)/param/dwa_local_planner_params.yaml" command="load" /><remap from="cmd_vel" to="$(arg cmd_vel_topic)"/><remap from="odom" to="$(arg odom_topic)"/><param name="DWAPlannerROS/min_vel_x" value="0.0" if="$(arg move_forward_only)" /></node><!-- rviz --><group if="$(arg open_rviz)"><node pkg="rviz" type="rviz" name="rviz" required="true"args="-d $(find ros_navigation)/rviz/ros_navigation.rviz"/></group></launch>
该launch文件启用了路径规划的节点,其中我们使用了dwa局部路径规划的方法。
_ros_2DNav.launch_
<launch><!--desire_posz_:期望高度--><arg name="desire_posz_" default="1" /><node pkg="px4_control" type="ros_nav_quadrotor_node" name="ros_nav_quadrotor_node" output="screen"><param name="desire_posz_" value = "$(arg desire_posz_)"/></node></launch>
这个launch文件主要负责启动将路径规划输出转换成无人机的飞控的节点, 该节点由c++编写实现,如下所示,主要实现ros navigation中move_base速度控制输出的cmd_vel控制px4 quadrotor
ros_nav_quadrotor.cpp
#include "ros_nav_quadrotor.h"using namespace std;using namespace Eigen;PX4RosNav::PX4RosNav(const ros::NodeHandle& nh, const ros::NodeHandle& nh_private):nh_(nh),nh_private_(nh_private) {initialize();cmdloop_timer_ = nh_.createTimer(ros::Duration(0.1), &PX4RosNav::CmdLoopCallback, this); // Define timer for constant loop ratecmd_vel_sub_ = nh_private_.subscribe("/px4_vel", 1, &PX4RosNav::CmdVelCallback, this,ros::TransportHints().tcpNoDelay());}PX4RosNav::~PX4RosNav() {//Destructor}void PX4RosNav::CmdLoopCallback(const ros::TimerEvent& event){PublishVelControl();}void PX4RosNav::PublishVelControl(){OffboardControl_.send_velxy_posz_setpoint(px4_vel_,desire_posz_);// cout << "px4_vel[0]"<<px4_vel_[0] <<endl;// cout << "px4_vel[1]"<<px4_vel_[1] <<endl;}void PX4RosNav::CmdVelCallback(const geometry_msgs::Twist &msg){px4_vel_[0] = msg.linear.x;px4_vel_[1] = msg.linear.y;}void PX4RosNav::initialize(){px4_vel_[0] = 0;px4_vel_[1] = 0;//读取offboard模式下飞机的期望高度nh_.param<float>("desire_posz_", desire_posz_, 1.0);}int main(int argc, char** argv) {ros::init(argc,argv,"ros_nav_quadrotor");ros::NodeHandle nh("");ros::NodeHandle nh_private("~");PX4RosNav PX4RosNav(nh, nh_private);ros::spin();return 0;}
Gazebo无人机导航仿真实现
编译运行
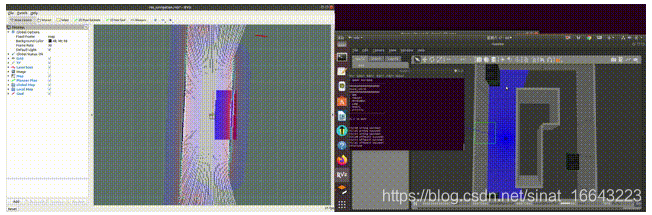
roslaunch simulation ros_2Dnav_demo_px4.launch
最终的效果如下动图所示,实现了无人机的路径规划以及规避障碍
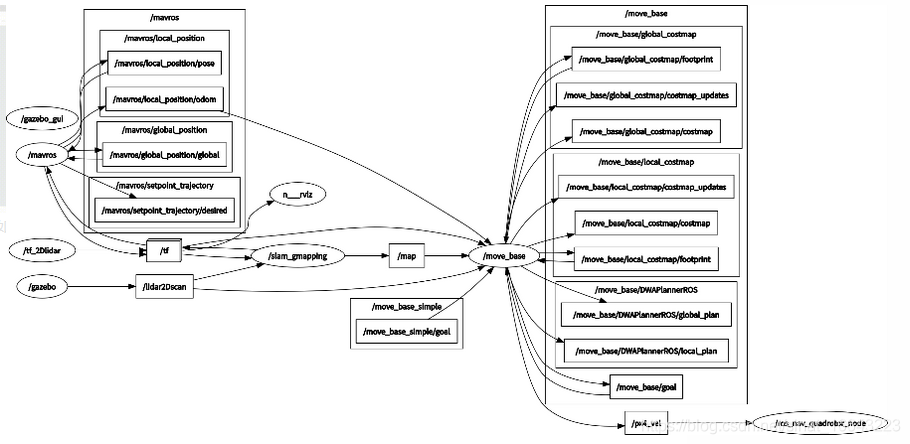
可参考最终节点图如下:

















 789
789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









