






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
Franka Ros接口:
使用ROS和Python API实现机器人的低级控制:
提示:以下是本篇文章正文内容,下面案例可供参考
一、需要安装什么?
1.ROS Melodic/Noetic
2.libfranka
3.Franka-ros v0.7.1
4.panda_moveit_config
5.Franka_panda_description(选择性、可以在Gazebo中实现、必须定期独立更新:git pull)
二、使用方法
1.构建工作空间
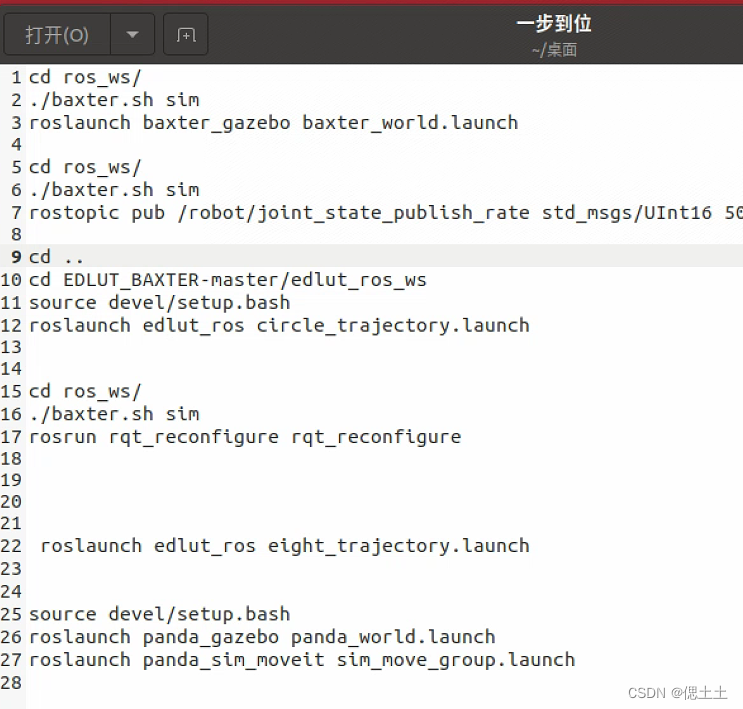
按照步骤一步步进行(作者所写是把命令打包到了一起,若运行错误可以分开执行)
代码如下(示例):
2.Docker构建
目的是使Gazebo 和Rviz正常工作
3.使用!
1.启动模拟器
代码如下(示例):
roslaunch panda_gazebo panda_world.launch
报错1
报错2

报错3

作者说上面的roslaunch命令不再自启动moveit服务器,用以下命令启动Moveit服务器
roslaunch panda_sim_moveit sim_move_group.launch
很好,执行完之后能够看到醒目的绿色!!!!You can start planning now!

但是看中间还是会有报错:

猜想:这是不是就是那个Franka_panda_description没更新,那更新一下?ok,怎么更新是个问题?
2.进行演示
(1)Moviet演示:该脚本启动用于运动规划的moveit Rviz GUI和用于修改规划场景的终端界面
roslaunch panda_simulator_examples demo_moveit.launch
该脚本报错:
执行:
RVIZ结果:

(2)使用Franka ROS Interface(或者PandaRobot)API进行任务空间控制,默认用前者API来检索状态信息,并用扭矩控制来控制它
roslaunch panda_simulator_examples demo_task_space_control.launch
报错: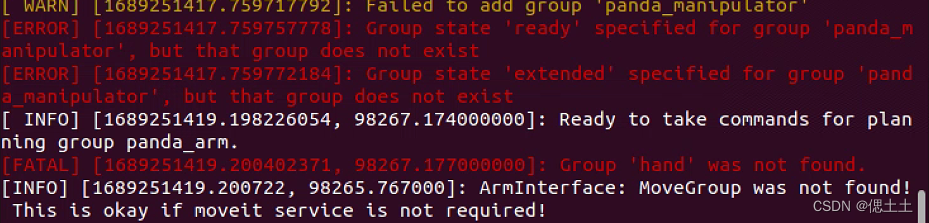
(3)直接用ROS主题进行任务空间控制
roslaunch panda_simulator_examples demo_task_space_control.launch use_fir:=False
use_fri:=False即代表不使用Franka ROS Interface而是直接使用Ros主题
报错同上?
总结
先解决报错把~















 1010
1010











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









