










-
init
->init_and_remove_ros_arguments
->init
->Context::init 保存初始化传入的信号
->install_signal_handlers→SignalHandler::install 开线程响应信号
->_remove_ros_arguments 移除ros参数
->SingleNodeManager::instance().init
->mogo_recorder::MogoRecorder::instance().Init 中间件录包初始化
->创建全局静态的NodeHandle
-
NodeHandle
-
构造nodehandle,并校验命名空间,内部调用
voidNodeHandle::construct(){SingleNodeManager::instance().increase_ref();} - param->从redis获取配置信息
-
-
create_generic_subscription 订阅接口
-->topics_interface->add_subscription(subscription, options.callback_group);-->voidCallbackGroup::add_subscription(constrclcpp::SubscriptionBase::SharedPtr subscription_ptr) {std::lock_guard<std::mutex> lock(mutex_);subscription_ptrs_.push_back(subscription_ptr);// timer service client waitable一样的逻辑subscription_ptrs_.erase(std::remove_if(subscription_ptrs_.begin(),subscription_ptrs_.end(),[](rclcpp::SubscriptionBase::WeakPtr x) {returnx.expired();}),subscription_ptrs_.end());} -
mogo::AsyncSpinner
/**
* AsyncSpinner 用来异步spin 某一个 callback group
* 如果thread_num =1,将创建一个独立的线程,进行指定callback group的spin
* 如果thread_num >1,将使用multithead spinner 执行callback group的spin
*
* 提示:若只是想要进行整个node的多线程的spin,请使用 mogo::multithread_spin
*/-
构造
-
start
创建执行器,将构造中传入的callback_group对象传入执行器,传入node;单独开个线程spin;多线程spin就是开指定多个线程并行spin动作
voidAsyncSpinner::start(){std::lock_guard<std::mutex> lock(mutex_);if(is_started_) {return;}mogo::spin();if(thread_num_ ==1) {exec_ = rclcpp::executors::SingleThreadedExecutor::make_shared();}else{exec_ = rclcpp::executors::MultiThreadedExecutor::make_shared(rclcpp::ExecutorOptions(), thread_num_);}exec_->add_callback_group(callback_group_,SingleNodeManager::instance().get_node()->get_node_base_interface());// 将回调组跟节点对象存入mapth_ = std::thread([this] {longtid = syscall(SYS_gettid);if(tid >0) {this->th_id_.store((int)tid);}exec_->spin();});is_started_ =true;}voidMultiThreadedExecutor::spin(){if(spinning.exchange(true)) {throwstd::runtime_error("spin() called while already spinning");}RCPPUTILS_SCOPE_EXIT(this->spinning.store(false); );std::vector<std::thread> threads;size_t thread_id =0;{std::lock_guard wait_lock{wait_mutex_};for(; thread_id < number_of_threads_ -1; ++thread_id) {auto func = std::bind(&MultiThreadedExecutor::run,this, thread_id);threads.emplace_back(func);}}run(thread_id);for(auto & thread : threads) {thread.join();}}voidSingleThreadedExecutor::spin(){if(spinning.exchange(true)) {throwstd::runtime_error("spin() called while already spinning");}RCPPUTILS_SCOPE_EXIT(this->spinning.store(false); );while(rclcpp::ok(this->context_) && spinning.load()) {rclcpp::AnyExecutable any_executable;if(get_next_executable(any_executable)) {// 内部从map中取execute_any_executable(any_executable);}}}
-
-
mogo::spin
voidspin(){SingleNodeManager::instance().spin();}voidSingleNodeManager::spin(){if(MOGO_UNLIKELY(!is_start_)) {throwstd::runtime_error("SingleNodeManager is not running, please create NodeHandle before that!");}if(!is_join_exec_) {std::lock_guard<std::mutex> lock(exec_mutex_);if(!is_join_exec_) {exec_->add_node(node_ptr_);is_join_single_exec_ =true;is_join_exec_ =true;}else{if(!is_join_single_exec_) {throwstd::runtime_error("Node has been joined in another exec");}}}exec_->spin();{std::lock_guard<std::mutex> lock(exec_mutex_);exec_->remove_node(node_ptr_);is_join_single_exec_ =false;is_join_exec_ =false;}}// 以subscription为例,以下详细函数调用栈1. 获取可执行对象boolExecutor::get_next_ready_executable_from_map(AnyExecutable & any_executable,constrclcpp::memory_strategy::MemoryStrategy::WeakCallbackGroupsToNodesMap &weak_groups_to_nodes){TRACEPOINT(rclcpp_executor_get_next_ready);bool success =false;std::lock_guard<std::mutex> guard{mutex_};// Check the timers to see if there are any that are readymemory_strategy_->get_next_timer(any_executable, weak_groups_to_nodes);if(any_executable.timer) {success =true;}if(!success) {// Check the subscriptions to see if there are any that are readymemory_strategy_->get_next_subscription(any_executable, weak_groups_to_nodes);if(any_executable.subscription) {success =true;}}...voidget_next_subscription(rclcpp::AnyExecutable & any_exec,constWeakCallbackGroupsToNodesMap & weak_groups_to_nodes) override{auto it = subscription_handles_.begin();while(it != subscription_handles_.end()) {auto subscription = get_subscription_by_handle(*it, weak_groups_to_nodes);if(subscription) {// Find the group for this handle and see if it can be servicedauto group = get_group_by_subscription(subscription, weak_groups_to_nodes);if(!group) {// Group was not found, meaning the subscription is not valid...// Remove it from the ready list and continue lookingit = subscription_handles_.erase(it);continue;}if(!group->can_be_taken_from().load()) {// Group is mutually exclusive and is being used, so skip it for now// Leave it to be checked next time, but continue searching++it;continue;}// Otherwise it is safe to set and return the any_execany_exec.subscription = subscription;any_exec.callback_group = group;any_exec.node_base = get_node_by_group(group, weak_groups_to_nodes);subscription_handles_.erase(it);return;}// Else, the subscription is no longer valid, remove it and continueit = subscription_handles_.erase(it);}}...rclcpp::SubscriptionBase::SharedPtrMemoryStrategy::get_subscription_by_handle(conststd::shared_ptr<constrcl_subscription_t> & subscriber_handle,constWeakCallbackGroupsToNodesMap & weak_groups_to_nodes){for(constauto & pair : weak_groups_to_nodes) {auto group = pair.first.lock();if(!group) {continue;}// check传入的subscriber_handle跟之前创建的是否匹配auto match_subscription = group->find_subscription_ptrs_if([&subscriber_handle](constrclcpp::SubscriptionBase::SharedPtr & subscription) -> bool {returnsubscription->get_subscription_handle() == subscriber_handle;});if(match_subscription) {returnmatch_subscription;}}returnnullptr;}...template<typename Function>rclcpp::SubscriptionBase::SharedPtrfind_subscription_ptrs_if(Function func)const{return_find_ptrs_if_impl<rclcpp::SubscriptionBase, Function>(func, subscription_ptrs_);}template<typename TypeT, typename Function>typename TypeT::SharedPtr _find_ptrs_if_impl(Function func,conststd::vector<typename TypeT::WeakPtr> & vect_ptrs)const{std::lock_guard<std::mutex> lock(mutex_);for(auto & weak_ptr : vect_ptrs) {auto ref_ptr = weak_ptr.lock();if(ref_ptr && func(ref_ptr)) {returnref_ptr;}}returntypename TypeT::SharedPtr();}至此就能匹配到对应的timer service client waitable subscription2. 构造执行器auto it = subscription_handles_.begin();while(it != subscription_handles_.end()) {auto subscription = get_subscription_by_handle(*it, weak_groups_to_nodes);if(subscription) {// Find the group for this handle and see if it can be servicedauto group = get_group_by_subscription(subscription, weak_groups_to_nodes);if(!group) {// Group was not found, meaning the subscription is not valid...// Remove it from the ready list and continue lookingit = subscription_handles_.erase(it);continue;}if(!group->can_be_taken_from().load()) {// Group is mutually exclusive and is being used, so skip it for now// Leave it to be checked next time, but continue searching++it;continue;}// Otherwise it is safe to set and return the any_execany_exec.subscription = subscription;any_exec.callback_group = group;any_exec.node_base = get_node_by_group(group, weak_groups_to_nodes);subscription_handles_.erase(it);return;}// Else, the subscription is no longer valid, remove it and continueit = subscription_handles_.erase(it);}3. 执行voidExecutor::execute_any_executable(AnyExecutable & any_exec){if(!spinning.load()) {return;}if(any_exec.timer) {TRACEPOINT(rclcpp_executor_execute,static_cast<constvoid*>(any_exec.timer->get_timer_handle().get()));execute_timer(any_exec.timer);}if(any_exec.subscription) {TRACEPOINT(rclcpp_executor_execute,static_cast<constvoid*>(any_exec.subscription->get_subscription_handle().get()));execute_subscription(any_exec.subscription);}if(any_exec.service) {execute_service(any_exec.service);}if(any_exec.client) {execute_client(any_exec.client);}if(any_exec.waitable) {any_exec.waitable->execute(any_exec.data);}// Reset the callback_group, regardless of typeany_exec.callback_group->can_be_taken_from().store(true);// Wake the wait, because it may need to be recalculated or work that// was previously blocked is now available.try{interrupt_guard_condition_.trigger();}catch(constrclcpp::exceptions::RCLError & ex) {throwstd::runtime_error(std::string("Failed to trigger guard condition from execute_any_executable: ") + ex.what());}}callback如何传入?业务代码订阅subscription = node_handle_.get_node()->create_generic_subscription(topic_meta.name,topic_meta.type,rosbag2_transport::Rosbag2QoS(queue_size),[this, topic_meta](std::shared_ptr<mogo::SerializedMessage> message) {// TODO 超过Xs没有回调加事件上报if(!mogo::ok())return;count_++;staticdoublenow_timestamp = mogo::TimeHelper::to_sec(mogo::Time::now());// calc hz every secondif(mogo::TimeHelper::to_sec(mogo::Time::now()) - now_timestamp >= mogo::TimeHelper::to_sec(mogo::Time::create(1))) {MOGO_INFO_STREAM_THROTTLE(10,"current callback frequency: "<< count_);count_ =0;now_timestamp = mogo::TimeHelper::to_sec(mogo::Time::now());}pushQueue(OutgoingMessage(message, topic_meta.name, topic_meta.type, mogo::Time::now()));},subscription_options);内层调用注册callbacktemplate<typename AllocatorT = std::allocator<void>>GenericSubscription(rclcpp::node_interfaces::NodeBaseInterface * node_base,conststd::shared_ptr<rcpputils::SharedLibrary> ts_lib,conststd::string & topic_name,conststd::string & topic_type,constrclcpp::QoS & qos,// TODO(nnmm): Add variant for callback with message info. See issue #1604.std::function<void(std::shared_ptr<rclcpp::SerializedMessage>)> callback,constrclcpp::SubscriptionOptionsWithAllocator<AllocatorT> & options): SubscriptionBase(node_base,*rclcpp::get_typesupport_handle(topic_type,"rosidl_typesupport_cpp", *ts_lib),topic_name,options.template to_rcl_subscription_options<rclcpp::SerializedMessage>(qos),true),callback_(callback),ts_lib_(ts_lib){// This is unfortunately duplicated with the code in subscription.hpp.// TODO(nnmm): Deduplicate by moving this into SubscriptionBase.if(options.event_callbacks.deadline_callback) {this->add_event_handler(options.event_callbacks.deadline_callback,RCL_SUBSCRIPTION_REQUESTED_DEADLINE_MISSED);}if(options.event_callbacks.liveliness_callback) {this->add_event_handler(options.event_callbacks.liveliness_callback,RCL_SUBSCRIPTION_LIVELINESS_CHANGED);}if(options.event_callbacks.incompatible_qos_callback) {this->add_event_handler(options.event_callbacks.incompatible_qos_callback,RCL_SUBSCRIPTION_REQUESTED_INCOMPATIBLE_QOS);}elseif(options.use_default_callbacks) {// Register default callback when not specifiedtry{this->add_event_handler([this](QOSRequestedIncompatibleQoSInfo & info) {this->default_incompatible_qos_callback(info);},RCL_SUBSCRIPTION_REQUESTED_INCOMPATIBLE_QOS);}catch(UnsupportedEventTypeException &/*exc*/) {// pass}}if(options.event_callbacks.message_lost_callback) {this->add_event_handler(options.event_callbacks.message_lost_callback,RCL_SUBSCRIPTION_MESSAGE_LOST);}}处理消息voidGenericSubscription::handle_serialized_message(conststd::shared_ptr<rclcpp::SerializedMessage> & message,constrclcpp::MessageInfo &){callback_(message);}消息从哪里来?---boolSubscriptionBase::take_serialized(rclcpp::SerializedMessage & message_out,rclcpp::MessageInfo & message_info_out){rcl_ret_t ret = rcl_take_serialized_message(this->get_subscription_handle().get(),&message_out.get_rcl_serialized_message(),&message_info_out.get_rmw_message_info(),nullptr);if(RCL_RET_SUBSCRIPTION_TAKE_FAILED == ret) {returnfalse;}elseif(RCL_RET_OK != ret) {rclcpp::exceptions::throw_from_rcl_error(ret);}returntrue;}rcl_ret_trcl_take_serialized_message(constrcl_subscription_t * subscription,rcl_serialized_message_t * serialized_message,rmw_message_info_t * message_info,rmw_subscription_allocation_t * allocation){RCUTILS_LOG_DEBUG_NAMED(ROS_PACKAGE_NAME,"Subscription taking serialized message");if(!rcl_subscription_is_valid(subscription)) {returnRCL_RET_SUBSCRIPTION_INVALID;// error already set}RCL_CHECK_ARGUMENT_FOR_NULL(serialized_message, RCL_RET_INVALID_ARGUMENT);// If message_info is NULL, use a place holder which can be discarded.rmw_message_info_t dummy_message_info;rmw_message_info_t * message_info_local = message_info ? message_info : &dummy_message_info;*message_info_local = rmw_get_zero_initialized_message_info();// Call rmw_take_with_info.bool taken =false;rmw_ret_t ret = rmw_take_serialized_message_with_info(subscription->impl->rmw_handle, serialized_message, &taken, message_info_local, allocation);if(ret != RMW_RET_OK) {RCL_SET_ERROR_MSG(rmw_get_error_string().str);returnrcl_convert_rmw_ret_to_rcl_ret(ret);}RCUTILS_LOG_DEBUG_NAMED(ROS_PACKAGE_NAME,"Subscription serialized take succeeded: %s", taken ?"true":"false");if(!taken) {returnRCL_RET_SUBSCRIPTION_TAKE_FAILED;}returnRCL_RET_OK;}注意:这里已经到rmw层了(DDS的封装层)rmw_ret_trmw_take_serialized_message_with_info(constrmw_subscription_t * subscription,rmw_serialized_message_t * serialized_message,bool * taken,rmw_message_info_t * message_info,rmw_subscription_allocation_t * allocation){returnrmw_fastrtps_shared_cpp::__rmw_take_serialized_message_with_info(eprosima_fastrtps_identifier, subscription, serialized_message, taken, message_info,allocation);}核心代码---循环通过data_reader_->take(data_values, info_seq,1)获取数据,最终内存拷贝到serialized_message中带出rmw_ret_t_take_serialized_message(constchar* identifier,constrmw_subscription_t * subscription,rmw_serialized_message_t * serialized_message,bool * taken,rmw_message_info_t * message_info,rmw_subscription_allocation_t * allocation){(void) allocation;*taken =false;RMW_CHECK_TYPE_IDENTIFIERS_MATCH(subscription handle,subscription->implementation_identifier, identifier,returnRMW_RET_INCORRECT_RMW_IMPLEMENTATION)auto info = static_cast<CustomSubscriberInfo *>(subscription->data);RCUTILS_CHECK_FOR_NULL_WITH_MSG(info,"custom subscriber info is null",returnRMW_RET_ERROR);eprosima::fastcdr::FastBuffer buffer;eprosima::fastdds::dds::SampleInfo sinfo;rmw_fastrtps_shared_cpp::SerializedData data;data.is_cdr_buffer =true;data.data = &buffer;data.impl = nullptr;// not used when is_cdr_buffer is trueeprosima::fastdds::dds::StackAllocatedSequence<void*,1> data_values;const_cast<void**>(data_values.buffer())[0] = &data;eprosima::fastdds::dds::SampleInfoSeq info_seq{1};while(ReturnCode_t::RETCODE_OK == info->data_reader_->take(data_values, info_seq,1)) {auto reset = rcpputils::make_scope_exit([&](){data_values.length(0);info_seq.length(0);});if(info_seq[0].valid_data) {auto buffer_size = static_cast<size_t>(buffer.getBufferSize());if(serialized_message->buffer_capacity < buffer_size) {auto ret = rmw_serialized_message_resize(serialized_message, buffer_size);if(ret != RMW_RET_OK) {returnret;// Error message already set}}serialized_message->buffer_length = buffer_size;memcpy(serialized_message->buffer, buffer.getBuffer(), serialized_message->buffer_length);if(message_info) {_assign_message_info(identifier, message_info, &info_seq[0]);}*taken =true;break;}}returnRMW_RET_OK;}fastrtps-fastdds---查数据ReturnCode_t DataReaderImpl::read_or_take(LoanableCollection& data_values,SampleInfoSeq& sample_infos,int32_t max_samples,constInstanceHandle_t& handle,SampleStateMask sample_states,ViewStateMask view_states,InstanceStateMask instance_states,bool exact_instance,bool single_instance,bool should_take){if(reader_ == nullptr){returnReturnCode_t::RETCODE_NOT_ENABLED;}ReturnCode_t code = check_collection_preconditions_and_calc_max_samples(data_values, sample_infos, max_samples);if(!code){returncode;}#ifHAVE_STRICT_REALTIMEauto max_blocking_time = std::chrono::steady_clock::now() +std::chrono::microseconds(::TimeConv::Time_t2MicroSecondsInt64(qos_.reliability().max_blocking_time));std::unique_lock<RecursiveTimedMutex> lock(reader_->getMutex(), std::defer_lock);if(!lock.try_lock_until(max_blocking_time)){returnReturnCode_t::RETCODE_TIMEOUT;}#elsestd::lock_guard<RecursiveTimedMutex> _(reader_->getMutex());#endif// if HAVE_STRICT_REALTIMEset_read_communication_status(false);auto it = history_.lookup_available_instance(handle, exact_instance);if(!it.first){if(exact_instance && !history_.is_instance_present(handle)){returnReturnCode_t::RETCODE_BAD_PARAMETER;}else{returnReturnCode_t::RETCODE_NO_DATA;}}code = prepare_loan(data_values, sample_infos, max_samples);if(!code){returncode;}detail::StateFilter states{ sample_states, view_states, instance_states };detail::ReadTakeCommand cmd(*this, data_values, sample_infos, max_samples, states, it.second, single_instance);while(!cmd.is_finished()){cmd.add_instance(should_take);}returncmd.return_value();} -
create_publisher
-
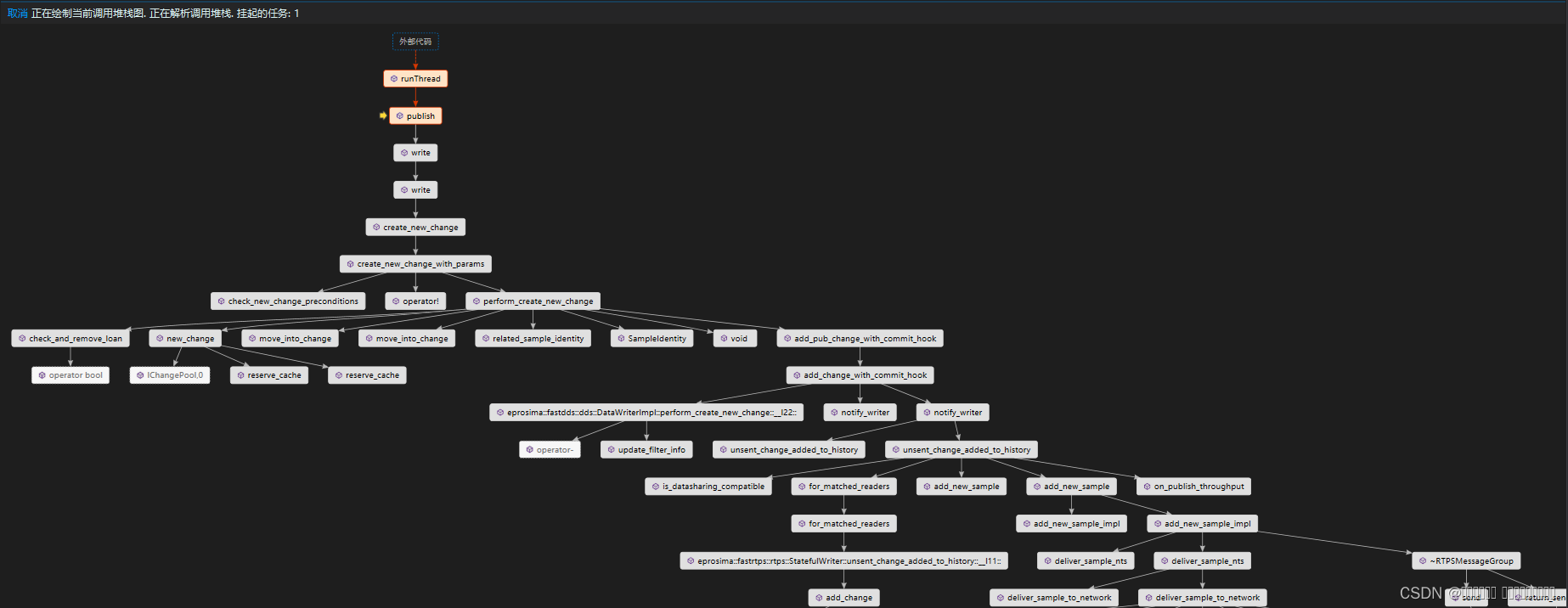
publish
-
mogo::shutdown
bool shutdown(){returnrclcpp::shutdown();}















 4804
4804











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









