







 本文探讨了智能船舶自主避碰算法的测试方法,包括仿真测试和实地测试,重点介绍了测试用例设计、性能评估指标和数据采集分析。文章还结合渔船群的特性,提出了一种基于渔船聚类的简化处理方式,以提高航行安全性和效率,遵循《避碰规则》并推动渔船自主航行技术的发展。
本文探讨了智能船舶自主避碰算法的测试方法,包括仿真测试和实地测试,重点介绍了测试用例设计、性能评估指标和数据采集分析。文章还结合渔船群的特性,提出了一种基于渔船聚类的简化处理方式,以提高航行安全性和效率,遵循《避碰规则》并推动渔船自主航行技术的发展。
简介
智能船舶自主避碰算法的测试方法主要分为仿真测试和实地测试两种。具体的测试方法包括:
1. 仿真测试:利用船舶仿真软件,如MATLAB/Simulink等,模拟船舶运动和环境情况,进行虚拟的船舶自主避碰算法测试。仿真测试具有成本低、安全可控、重复性好等优点。
2. 实地测试:在实际海上环境中搭建测试场景,通过安装传感器、搭建通信系统等手段,对船舶自主避碰算法进行实地测试。实地测试能够真实地反映算法的性能,但成本较高、难度较大。
在具体测试过程中,可以考虑以下几个方面:
1. 测试用例的设计:根据船舶避碰的各种情况和场景,设计一系列具有代表性的测试用例,包括不同船舶间距离、船舶速度、船舶航迹角等。
2. 性能评估指标:根据船舶自主避碰算法的特点,设计相应的性能评估指标,如避碰成功率、避碰时间、路径规划准确性等。
3. 数据采集与分析:在测试过程中,收集和记录各种数据,包括传感器数据、算法输出结果等。通过数据分析,评估算法的性能和可靠性。
4. 对比实验:将不同的船舶自主避碰算法进行对比实验,比较它们的性能差异和优劣之处,为算法改进提供参考。
总结起来,智能船舶自主避碰算法的测试方法主要包括仿真测试和实地测试两种,具体测试过程可以根据算法特点和需求设计相应的测试用例、评估指标,并进行数据采集与分析,最终通过对比实验评估算法的性能和可靠性。
避碰规则
在如今日益拥挤的海洋环境中,渔船的安全航行问题备受关注。多船避碰路径规划的研究针对了海上渔船群可能遇到的避让问题,具有重要的理论和实践意义。首先,渔船群的安全航行直接关系到渔民的生命财产安全和海洋资源的保护。在海上航行中,与其他船只避碰是一项极具挑战性的任务,其安全性和合规性直接影响到渔船群成员的安全和海洋资源的保护。其次,多船避碰路径规划的研究可以为科学决策提供支持。通过引入先进的路径规划算法和避碰策略,可以使得渔船群在复杂的海上环境中选择最安全、最合适的航线,有效避免与其他船只发生碰撞,提高渔船群的航行安全性和效率。此外,多船避碰路径规划的研究还对推动渔船自主航行技术的发展具有重要意义。随着人工智能和自主导航技术的不断进步,渔船自主航行已成为未来发展的重要方向。通过研究渔船群的多船避碰问题,可以推动渔船自主航行技术的发展,提升渔船航行的智能化水平,促进渔业现代化进程。因此,多船避碰路径规划的研究意义在于以解决避让渔船群的安全问题为出发点,为提升渔船群航行安全性、保护海洋资源、推动渔船自主航行技术的发展提供重要理论和技术支持。
依据《避碰规则》第一章第一条的规定:“本规则条款适用于在公海和连接公海可供海船航行的一切水域中的一切船舶”,可知在适用《避碰规则》的水域中,所有船舶都必须遵守《避碰规则》的相关要求,包括智能船舶、无人艇以及渔船等。此外,《避碰规则》对于船舶之间的互见情况进行了区分定义,不同环境下的约束也不同,因此,在避碰过程中需要综合考虑互见与否等情况。根据《避碰规则》的明确定义,从事捕鱼的船舶指的是使用渔具捕鱼的船只,这些渔具会使船舶的操纵性能受到限制。然而,这个定义排除了那些使用其他渔具且不会导致操纵能力受限的船舶。因此,要将船舶认定为从事捕鱼的船舶,必须满足两个条件:首先,船舶正在进行捕鱼活动;其次,所使用的渔具必须限制其操纵能力。因此,在遇到正常航行中的渔船时,如果该船不符合上述《避碰规则》对从事捕鱼的船舶的定义,则应将其视为一般机动船。此外,对于多艘船舶相遇的情景,《避碰规则》并没有详细规定船舶间的具体行动方式。由于船舶可能在不同水域中航行,其船舶流量也会有所不同。因此,智能船舶需要解决的一个基本问题是如何在多船相遇情况下灵活选择避碰决策模式,并采取符合具体情景的行动。这些问题的研究将有助于推动船舶在多船避碰中的应用,提高船舶在渔区航行的安全性和效率。
1.1 对遇局面
当两艘船舶正面相遇时,双方都必须向右舷改变航向,以便从对方左舷通过。如图3所示,A船和B船都应转向右舷,为对方让路。
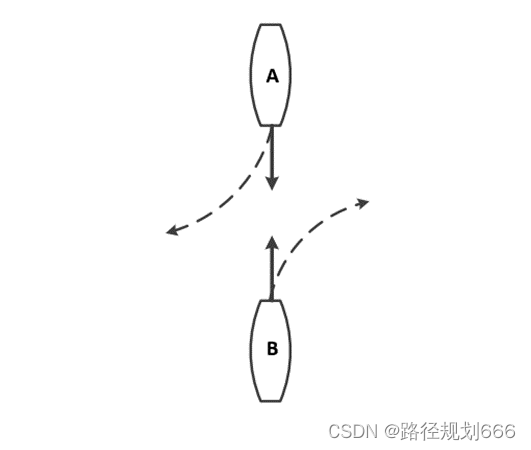
图 3 对遇示意图
1.2 交叉相遇局面
当两艘船舶交叉相遇时,右舷有对方的船舶必须让路并避免横越他船船首。如图4所示,船舶A应让路给船舶B,并且船舶B应保持原航向。
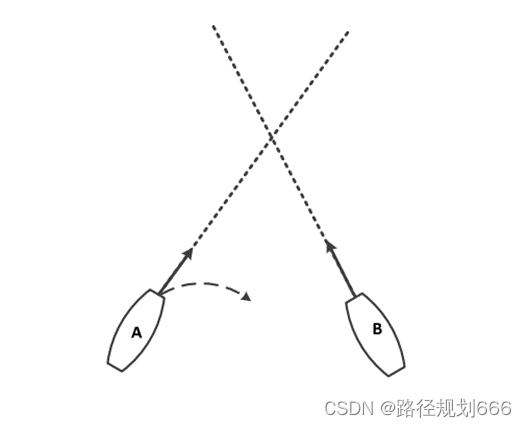
图 4 交叉相遇示意图
1.3 追越局面
一个追越的船舶必须让路给被追越的船舶。所谓追越是指以超过被追越船舶船艏后方22.5度的角度接近另一艘船舶。如图5所示,船舶B正在追越船舶A的航线,船舶B应让路给船舶A。尽管《海上避碰规则》未明确规定船舶追越时必须从哪一侧超越,但水上的常规做法追越的船舶应该从被追越船舶的右侧超越。
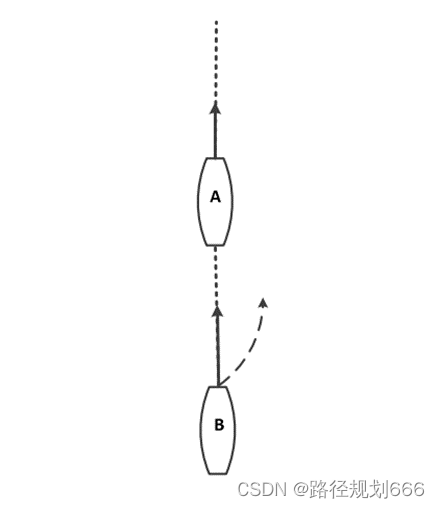
图 5 追越示意图
4.2 多目标船舶避碰
几何避碰算法对多目标船舶的原理如下:
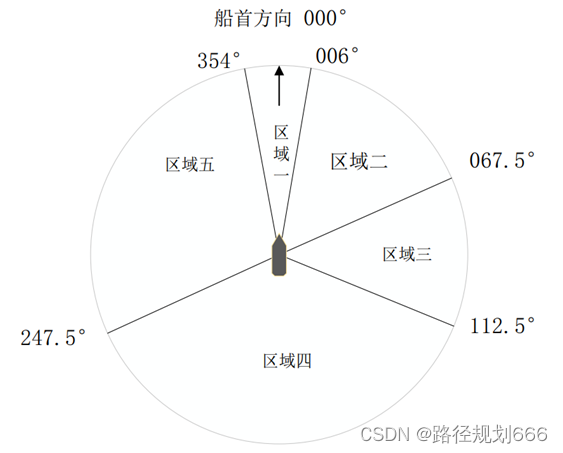
如图所示,假设船舶A是本船,而B、C和D是渔区的渔船。只有当渔船位于正对区域或右舷横越区域时,本船A才应该向右转。正对区域的边界由AP表示,横越区域的边界由AR表示。
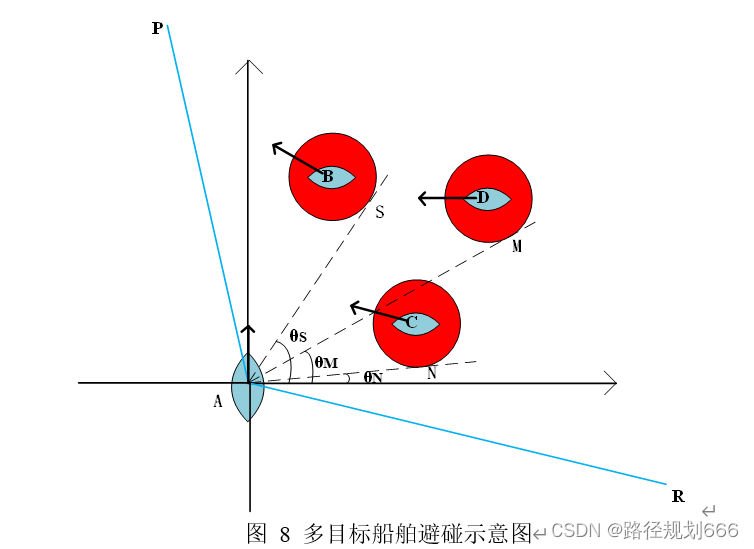
图 8 多目标船舶避碰示意图
根据4.1的分析,只有在渔船船舶领域的左侧切点被选为碰撞解决航点。渔船B、渔船C和渔船D的领域左侧切点分别用S、N和M表示。考虑到本船与切点之间的相对速度,我们使用文献[15]中提出的方法计算船舶前往点S、N和M的所需航向角,分别用θS、θM和θN表示。当本船遇到多个潜在的碰撞时,将生成多个碰撞解决航点。因此,需要采用选择一个碰撞解决航点以避免所有渔船的方法,具体方法如式(9)所示。
我们的研究专注于船舶在渔区航行时的避让方法。首先,我们深入探讨了渔区的特点,包括渔船活动、渔网分类及布置方法等。基于此,我们提出了在渔区航行时应采取的合理规避策略,如避让渔船群、规避渔网区域、调整航行速度和航向等。同时,我们强调了遵守国际规则、采用现代导航技术、实时监控和合作沟通等手段的重要性。
其次,我们针对船舶在渔区航行和避让的要求,提出了一种基于渔船聚类方法的简化处理方式。该方法利用系统聚类法对渔船区块进行聚类,考虑了渔船的航向、航速和距离因素,并设定了相应的聚类规则,以降低计算复杂度。通过这种方法,我们将具有相似运动状态的渔船聚合为一类,从而减少了目标船数量,简化了避碰行动的复杂度。接着,我们重新定义了船舶对聚类后的渔船区块进行避让的安全领域。通过将聚类后的渔船区块用一个较大的领域圆表示,并确定领域圆的圆心和半径,简化了避让过程中的决策,提高了效率。
我们的研究为船舶在渔区航行中的避让提供了新的思路和方法,有助于提升航行安全性和效率。
代码获取:
哔哩哔哩视频评论区
【船舶几何避碰算法(遵守避碰规则)B7】 https://www.bilibili.com/video/BV1qu4m1u78f/?share_source=copy_web&vd_source=7d9aed35a852d1714dbcfbab31c29df0


















 685
685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









