







国外课程资料:
http://blog.csdn.net/zhangrelay/article/details/69382096
参考书籍:
ROS机器人项目(2017-03,I,Python)
ROS高效的机器人编程 - 第三版(2016-12,I,Python)
5天内的ROS:完全实用的ROS培训(2016-12,I. Python)
ROS_Robotics_By_Example(Python)
Mastering ROS for Robotics Programming(2015-12,IJ,C ++)
Programming_Robots_with_ROS(2015-12,I,Python)
ROS_Robot_Programming_ 日语(2015-11,I,C ++)
Learning ROS for Robotics Programming_second_edition(2015-08,HIJ,C ++)
机器人编程ROS 日语(2015-06,I,C ++&Python)
Learning Robotics Using Python(2015-05,IJ,Python)
ROS_Robot_Programming Korean(2015-03,I,C ++)
ROS Book_KR 韩国(2014-12,I,C ++)
ROS by Example Vol 2(2014,HI,Python)
A Gentle Introduction to ROS(2013-10,G,C ++)
A Gentle Introduction to ROS_Chinese chinese(2013-10,I,C ++)
ROS by Example(2013,GH,Python)
------
教学资源
有一些使用ROS和/或PR2教授的课程。您可以在下面找到一些可能帮助您设计自己的课程的示例。
您是否使用ROS或以下未列出的PR2教授课程(在任何级别)?请将其添加到列表中。如果您有设置实验室,课程计算机或任何其他与教学相关的主题的建议,请发贴。通过分享材料,我们将更快地创建有效的课程。
短期课程
RobotCraft 2017:第二届机器人技术国际学院(Ingeniarius有限公司和葡萄牙科英布拉大学)
RobotCraft 2016:第一届机器人技术国际学院(Ingeniarius有限公司和葡萄牙科英布拉大学)
#projectCoSys研讨会ROS 2015年5月(尼泊尔普尔科克校区工程研究所) [Facebook活动页面
了解如何使用网络浏览器(Robot Ignite Academy)进行教学
ROS研讨会2015年3月(机电一体化部,巴基斯坦NUST)
ROS框架2013夏季课程(里斯本高级研究所(Instituto SuperiorTécnico)
SIGCSE 2012 课程ROS教育研讨会网站/ sigcse2012
CoTeSys-ROS秋季学校启用认知移动操作(慕尼黑TU)
澳大利亚国立大学的ROS / Turtlebot教程(ANU) ROS教程视频在ANU演示
ROS动手介绍/教程 - 机器人远景暑期学校2015(澳大利亚机器人视觉中心)
大学(本科及研究生)课程
GEI740 - “机器人手机计划” - 基于行为的移动导航与凉亭(Sherbrooke大学)
ME 495:机器人嵌入式系统(西北大学,Evanston IL)
EECS 376/476:移动机器人(Case Western Reserve University,Cleveland OH)
使用ROS编程机器人(西班牙马德里,大学Rey Juan Carlos)
出版物
N. Correll,R. Wing,D. Coleman(2012):计算机科学高年级一年入门机器人课程。In:IEEE Transactions on Education,2012。
------
机器人
------
ROS支持的传感器
官方的ROS package包支持好几种自动传感器,ROS社区支持的传感器种类更多。但是,做的还不够,各个型号的传感器都应该有详细的说明文档,以及稳定的代码接口。
目录
入门页
入门页的内容,帮助你,在ROS环境下,如何安装和使用不同的传感器。每一个入口页面,都会有相应的知道文档和通用的接口说明。
完整列表
1维传感器
2维传感器
3维传感器(包括距离探测和RGB-D照相机设备)
音频/语音 识别
视觉相机
环境感知
推力/扭力/触摸 传感器
动作捕获
估计定位(GPS/IMU)
电源
射频识别
传感器接口
------
ROS电机控制器驱动器
该页面集成了所有可以与电机控制器或伺服控制器进行接口的ROS封装。
PhidgetMotorControl HC(1064)
phidgets-ros-pkg
节点架构
- 发布者/订阅者模型
- 订阅:
cmd_vel(geometry_msgs.msg.Twist)
- 发布:
- 电动机/电机控制motor_params(电机指数,速度和电流)
Roboteq AX2550电机控制器
au_automow_drivers
- Python和C ++可用
节点架构
- 发布者/订阅者模型
https://github.com/Auburn-Automow/au_automow_drivers/tree/master/ax2550_python/nodes
- 订阅:
cmd_vel(geometry_msgs.msg.Twist)
- 发布:
base_odom(nav_msgs.msg.Odometry)
base_pose(geometry_msgs.msg.PoseStamped)
Robotis Dynamixel伺服器
dynamixel_motor
------
大事件:
------
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议。
ROS:
-
- 在你的机器上安装ROS。
- 学习ROS的相关概念、客户端函数库以及技术梗概等。
- ROS手把手教程,提供每一步详细操作命令。
- 如何加入ROS社区,比如分享你的代码。
- 遇到问题可以从这里寻求支持和帮助。
软件:
机器人/硬件:
出版物、课程以及活动:
ROS中国:
世界各地wiki镜像站点。
------







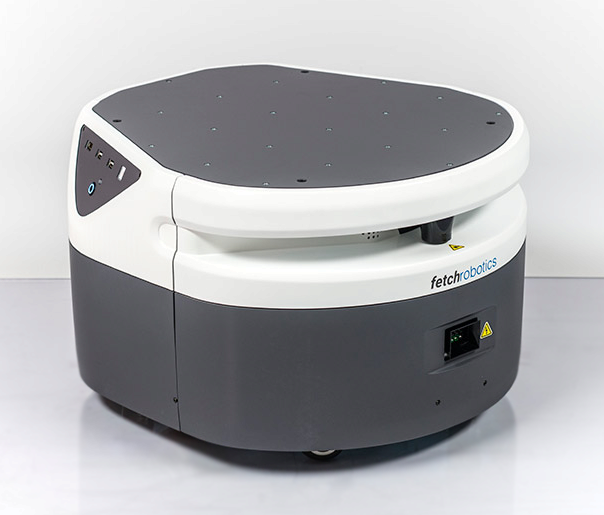
REEM
由PAL机器人创建的人形机器人机器人REEM可以用于多种目的。由于其自主导航系统,其用户友好的触摸屏及其语音和人脸识别系统,REEM可以在各种环境中找到方式,并在大多数公共环境中帮助或娱乐人们。

REEM-C
REEM-C是PAL机器人最新的商业人形机器人。REEM-C是一个成人尺寸的人形生物(165厘米),它有44度自由度,两台i7电脑,每个脚上的力/扭矩和测距仪,立体声相机,4个麦克风和其他使REEM-C一体的设备今天装备精良的研究平台。













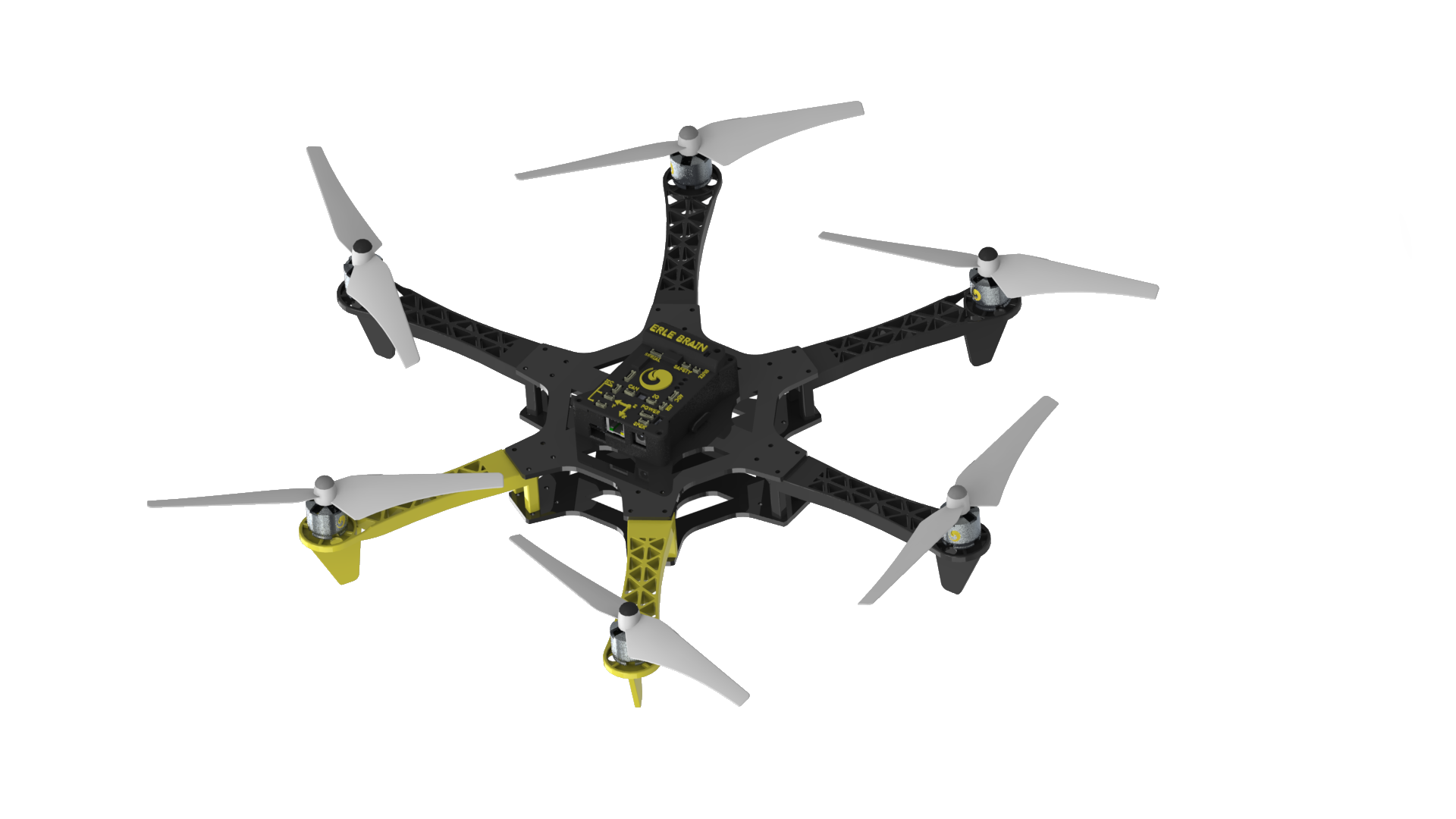
埃尔脑
资源:
Erle-brain是一款基于Linux的自动驾驶仪,用于制造无人机。它包括一个BeagleBone黑色和PixHawk Fire斗篷,它搭配了一个拥有29个传感器和许多接口可能性的1GHz Cortex-A8嵌入式计算机。
Cyton Gamma
资源:
ROS-Cyton模块为Energid的actinSE和Robai的Cyton 7-DOF类人机器人提供了一个ROS接口。该模块的目的是通过ROS暴露肌动蛋白和Cyton硬件API。















埃尔 - 直升机
Erle-copter是一款基于Linux的无人机,使用获奖的APM:自动驾驶仪自动驾驶仪。它具有不同的飞行模式,是户外操作的理想选择。它的设计延长了飞行时间,可以承载约2公斤的起飞重量。



这个网站是GitHub上的一个社区协作![]() 。请通过向github上的ros-infrastructure / robots.ros.org提交请求来为本网站做出贡献。
。请通过向github上的ros-infrastructure / robots.ros.org提交请求来为本网站做出贡献。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









