







目录
前言
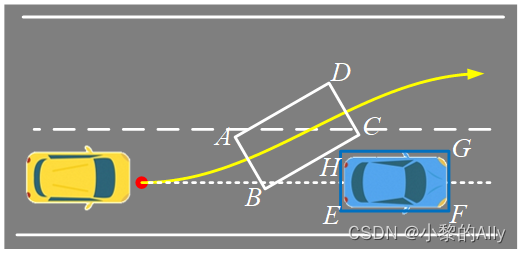
路径规划中,要保证规划的局部路径对应的本车矩形框不与静态障碍物矩形框相交。
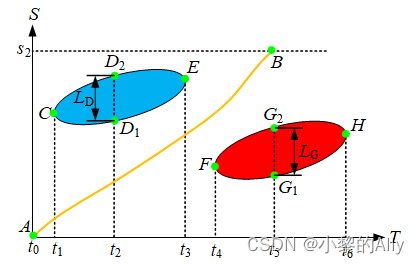
速度规划中,要保证ST
图中规划的速度曲线不与障碍物形成的封闭多边形相交。
归根到底,这类问题都是为了解决碰撞检测,即如何转化为判断平面中两条线段的(相交与否)关系。
一、线段相对位置关系及叉乘原理
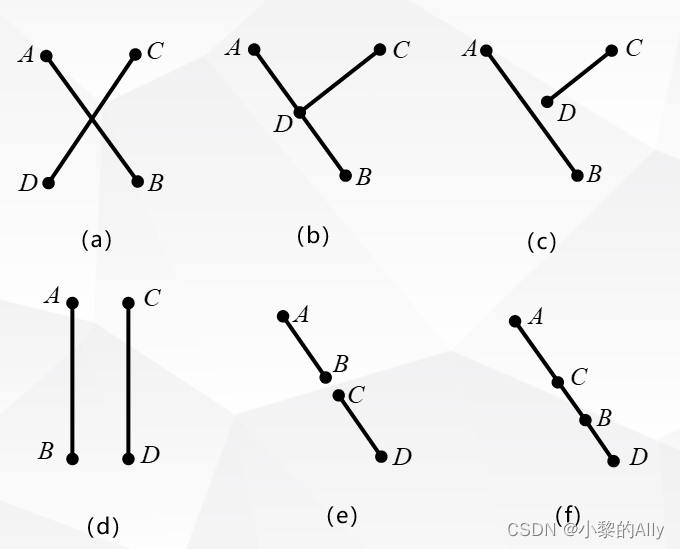
先给出平面两条线段的常见位置关系:
(
a
)图表示两条线段
AB
与
CD
完全交叉
;
(
b
)图表示线段
CD
的端点
D
位于另一条线段
AB
上,端点
D
既可在线段
AB
内,也可在线段
AB
的某个端点上
;
(
c
)图表示两条线段不平行,且不相交
;
(
d
)图表示两条线段平行,但不共线
;
(
e
)图表示两条线段共线,但不重合
;
(
f
)图表示两条线段共线,且局部重合
。
二、位置关系判断
1.两线段完全交叉的判定
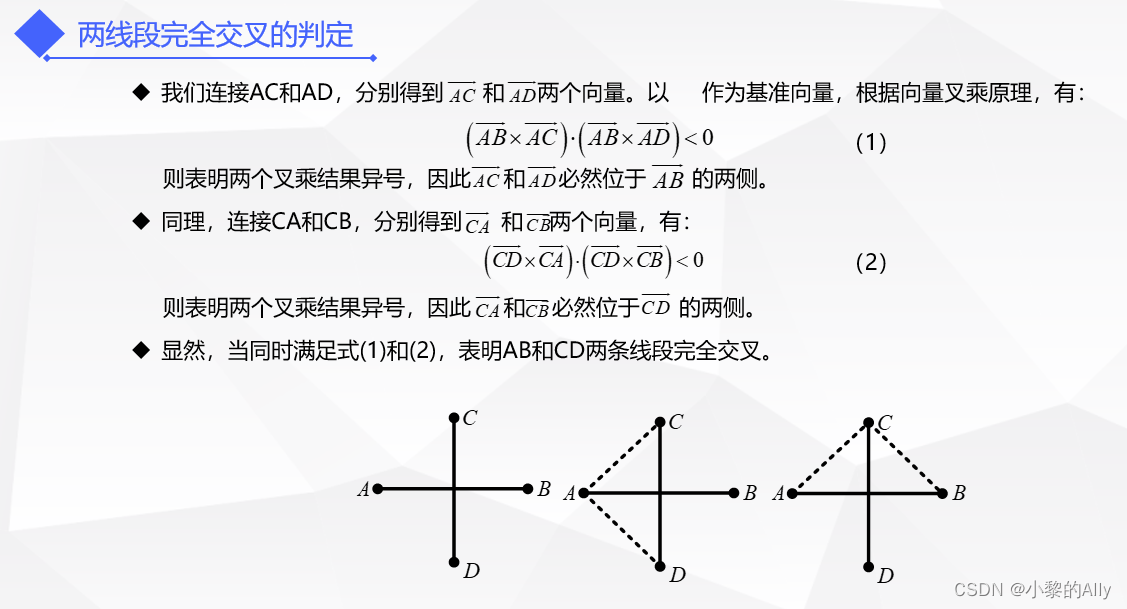
2. 一线段端点位于另一线段上的判定
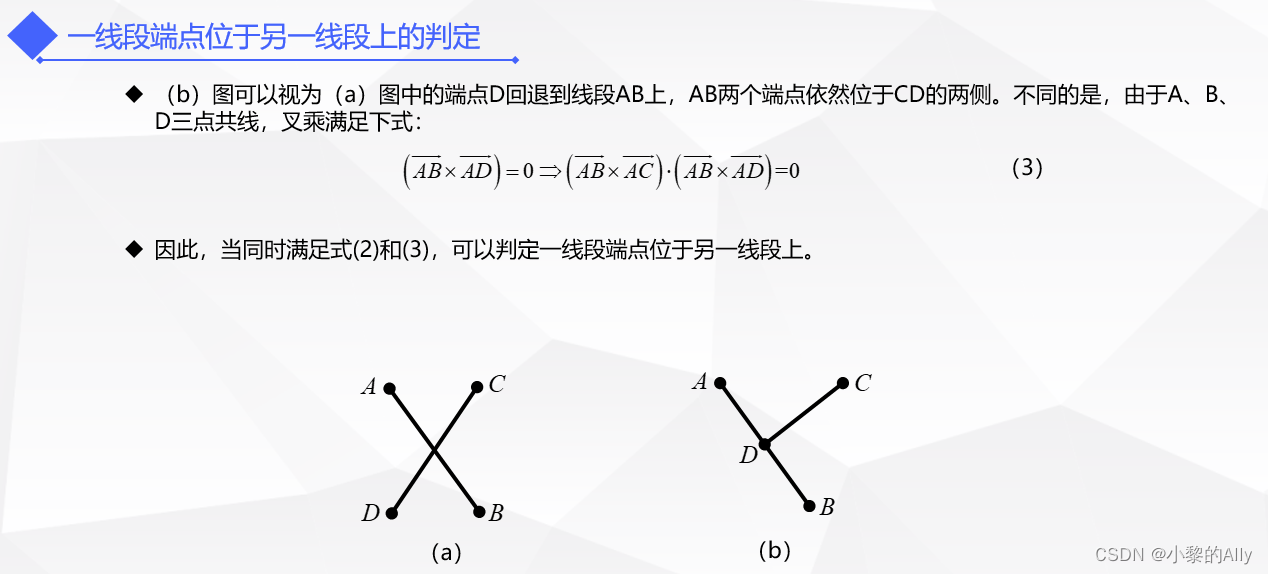

4. 两条线段平行,但不共线
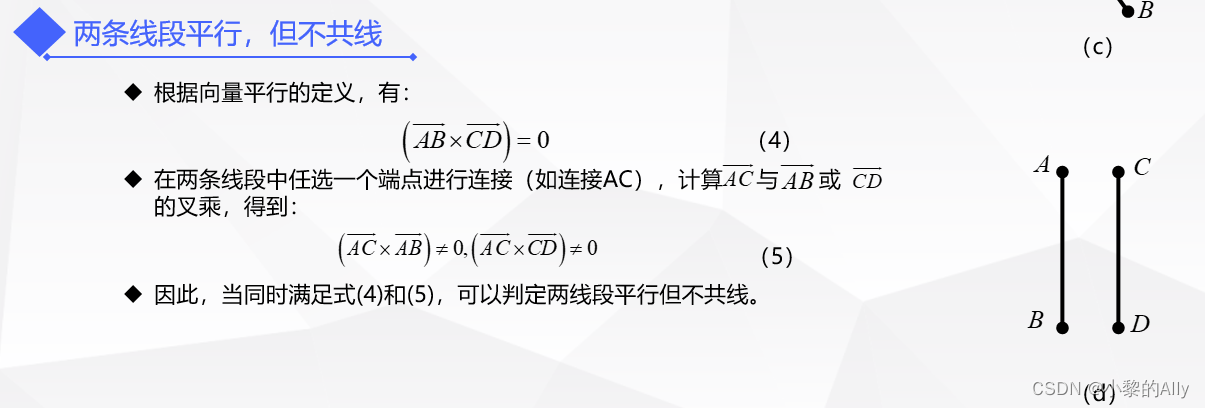
5. 两线段共线,但不重合
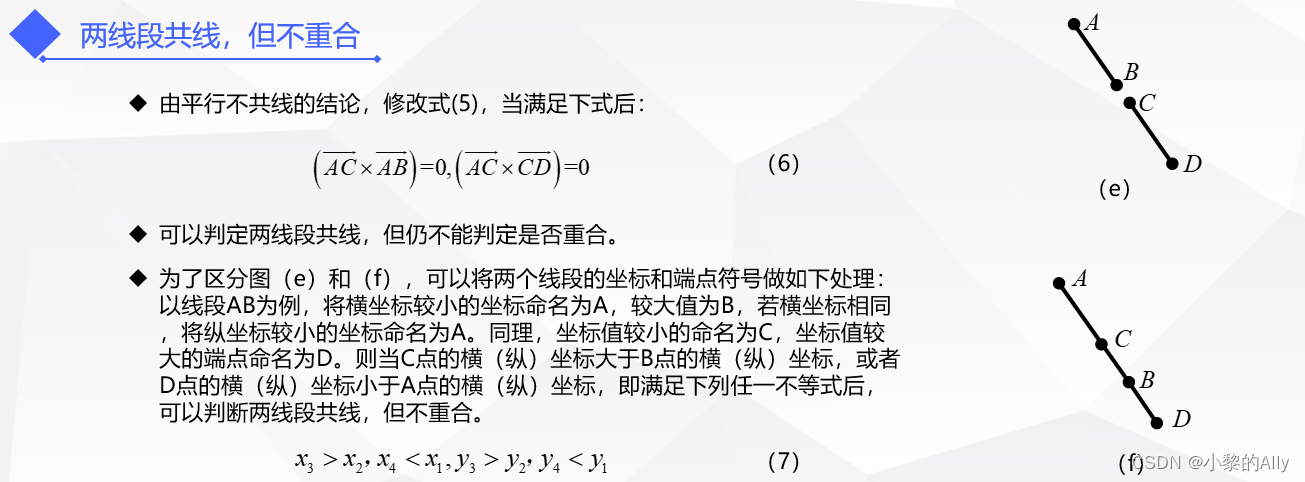
6. 两线段共线且重合
当式
(7)
中四个不等式都不满足时,可以判定两条线段重合。
三、示例仿真
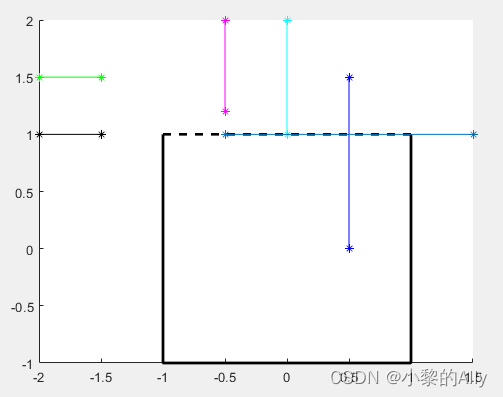
我们通过构造6条线段与某个多边形中的一边,考察其是否相交。示意图如下:
示例仿真代码如下所示:
clc
clear
close all
%% 主程序
% 多边形及线段
poly = [-1,1; 1,1; 1,-1; -1,-1;-1,1];
line1 = [0.5,0; 0.5,1.5];
line2 = [0,2; 0,1];
line3 = [-0.5,1.2; -0.5,2];
line4 = [-2 1.5; -1.5,1.5];
line5 = [-2 1; -1.5,1];
line6 = [-0.5 1; 1.5,1];
% 画图
figure
hold on
plot(poly(2:end,1), poly(2:end,2),'k','linewidth',2);
plot(poly(1:2,1), poly(1:2,2),'k--','linewidth',2);
plot(line1(:,1), line1(:,2),'b-*');
plot(line2(:,1), line2(:,2),'c-*');
plot(line3(:,1), line3(:,2),'m-*');
plot(line4(:,1), line4(:,2),'g-*');
plot(line5(:,1), line5(:,2),'k-*');
plot(line6(:,1), line6(:,2),'-*');
% 调用碰撞检测函数
poly_temp = poly(1:2,:);
is_intersect1 = intersect_check(line1,poly_temp);
is_intersect2 = intersect_check(line2,poly_temp);
is_intersect3 = intersect_check(line3,poly_temp);
is_intersect4 = intersect_check(line4,poly_temp);
is_intersect5 = intersect_check(line5,poly_temp);
is_intersect6 = intersect_check(line6,poly_temp);
%% 函数
% 碰撞检测
function is_intersect = intersect_check(line,poly)
[A,B] = sortPoint(line);
ployPointNum = size(poly,1);
is_intersect = false;
for i = 1:ployPointNum-1
line_temp = poly(i:i+1,:);
[C,D] = sortPoint(line_temp);
% 1-检测线段CD的两个端点是否位于线段AB两边
AB = B - A;
AC = C - A;
AD = D - A;
result1 = AB(1) * AC(2) - AB(2) * AC(1);
result2 = AB(1) * AD(2) - AB(2) * AD(1);
% 2-检测线段AB的两个端点是否位于线段CD两边
CD = D - C;
CA = A - C;
CB = B - C;
result3 = CD(1) * CA(2) - CD(2) * CA(1);
result4 = CD(1) * CB(2) - CD(2) * CB(1);
% 3-判断两条线段是否相交
if result1 * result2 < 0 && result3 * result4 < 0 || ...
result1 * result2 == 0 && result3 * result4 < 0 ||...
result1 * result2 < 0 && result3 * result4 == 0
% 若两条线为X形,或者一个端点在另一个线段上(T形),则相交
is_intersect = true;
break
elseif result1 == 0 && result2 == 0 && result3 == 0 && result4 == 0
% 4个都为0,表明两条线段共线,但是否重合需进一步判断
% 由于线段端点已经排序,只需要排除共线但不重合的情况即可
if ~(C(1) > B(1) || D(1) < A(1) || ... % X方向
C(2) > B(2) || D(2) < A(2)) % Y方向
is_intersect = true;
break
end
end
end
end
% 对线段的两个端点排序
function [A,B] = sortPoint(line)
A = line(1,:);
B = line(2,:);
% 将线段的端点按照大小排列
if line(1,1) < line(2,1)
A = line(1,:);
B = line(2,:);
elseif line(1,1) > line(2,1)
A = line(2,:);
B = line(1,:);
else
if line(1,2) < line(2,2)
A = line(1,:);
B = line(2,:);
elseif line(1,2) > line(2,2)
A = line(2,:);
B = line(1,:);
end
end
end运行后,得到如下结果,1代表相交,0代表不相交。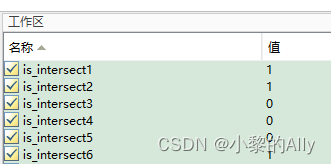
















 1749
1749











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











